
工业机器人技术基础751工业机器人的运动控制(连续轨迹控制)-课件(2).ppt

lj****88


1/9

2/9

3/9
4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人技术基础751工业机器人的运动控制(连续轨迹控制)-课件(2).ppt
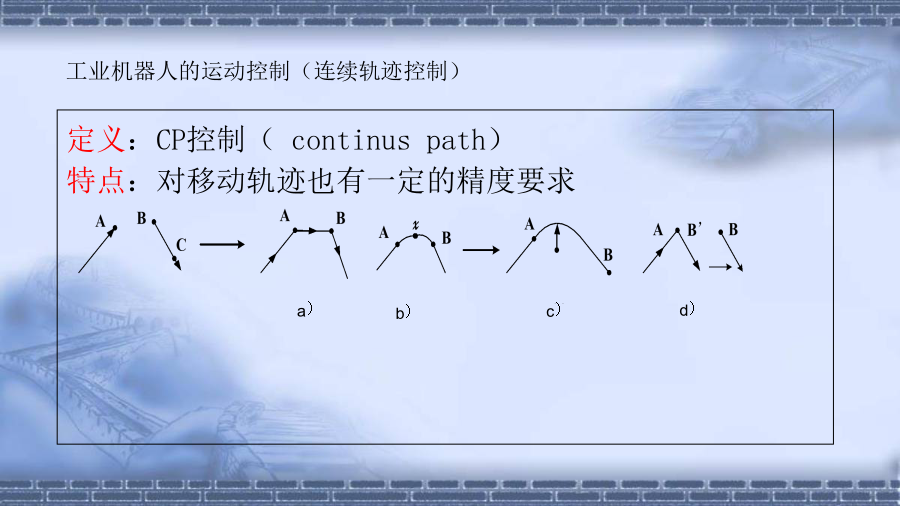
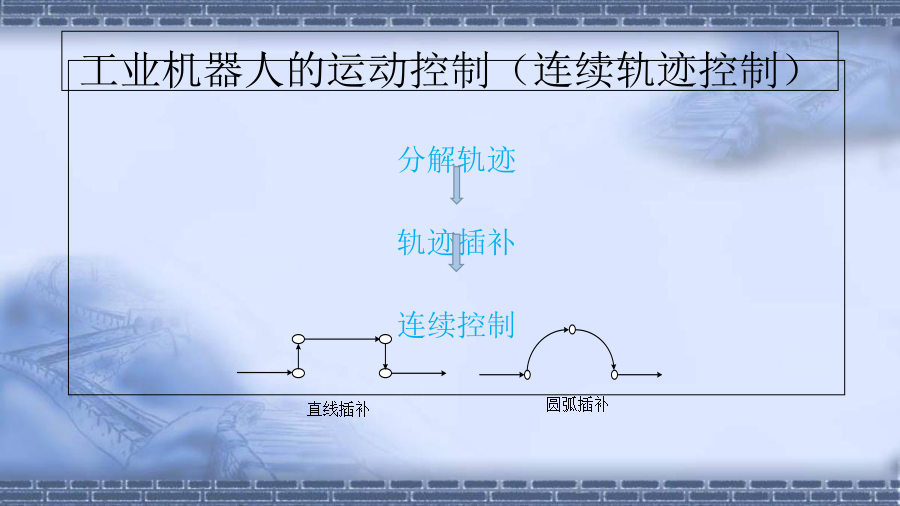
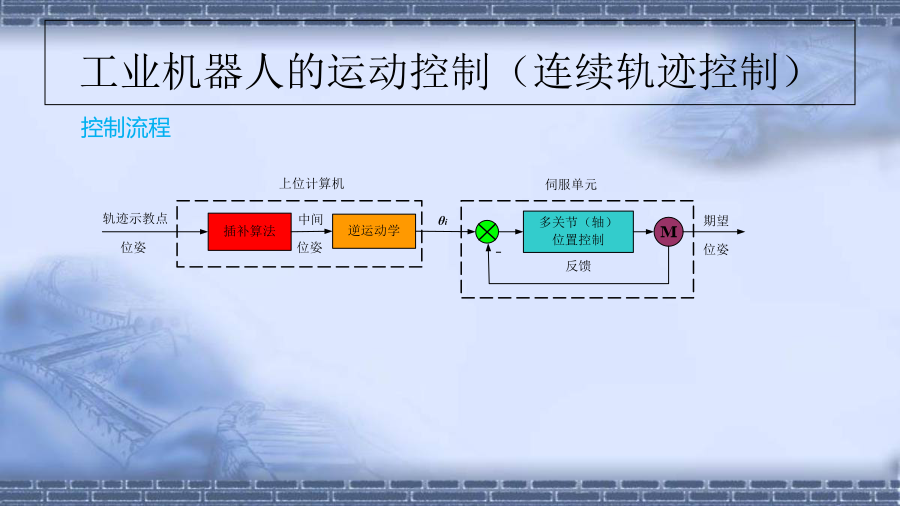
工业机器人的运动控制——连续轨迹控制主要内容工业机器人的运动控制(连续轨迹控制)工业机器人的运动控制(连续轨迹控制)工业机器人的运动控制(连续轨迹控制)工业机器人的运动控制(连续轨迹控制)工业机器人的运动控制(连续轨迹控制)工业机器人的运动控制(连续轨迹控制)总结

工业机器人的轨迹规划和控制.doc
工业机器人的轨迹规划和控制S.R.MunasingheandMasatoshiNakamura1.简介工业机器人操作臂被用在各种应用中来实现快速、精确和高质量的生产。在抓取和放置操作,比如对部分的操作,聚合等,操作臂的末端只执行器必须在工作空间中两个特定的位置之间移动,而它在两者之间的路径却不被关心。在路径追踪应用中,比如焊接,切削,喷涂等等,末端操作器必须在尽可能保持额定的速度下,在三维空间中遵循特定的轨迹运动。在后面的事例中,在对末端操作器的速度、节点加速度、轨迹有误等限订的情况下轨迹规划可能会很复杂

工业机器人的运动轨迹.docx
专题综述课程名称工业自动化专题题目名称工业机器人的运动轨迹学生学院_____自动化________专业班级_____学号学生姓名_____指导教师__________2013年6月27日工业机器人的运动轨迹综述【摘要】:随着知识经济时代的到来,高技术已成为世界各国争夺的焦点,机器人技术作为高技术的一个重要分支普遍受到了各国政府的重视。自此,多种不同的研究方向都在工业机器人实时高精度的路径跟踪来实现预期目的。而工业机器人的运动轨迹又是重中之重,在得到反馈信息之后,如何作出应答,并且实时检查轨迹与所计算出的轨

工业机器人技术基础72工业机器人控制系统的特点-课件.pptx
工业机器人控制系统的特点主要内容工业机器人控制系统的特点工业机器人控制系统的主要特点总结
工业机器人的轨迹规划和控制.doc
工业机器人的轨迹规划和控制S.R.MunasingheandMasatoshiNakamura1.简介工业机器人操作臂被用在各种应用中来实现快速、精确和高质量的生产。在抓取和放置操作,比如对部分的操作,聚合等,操作臂的末端只执行器必须在工作空间中两个特定的位置之间移动,而它在两者之间的路径却不被关心。在路径追踪应用中,比如焊接,切削,喷涂等等,末端操作器必须在尽可能保持额定的速度下,在三维空间中遵循特定的轨迹运动。在后面的事例中,在对末端操作器的速度、节点加速度、轨迹有误等限订的情况下轨迹规划可能会很复杂