
基于Kinect深度信息的智能轮椅动态手势识别方法.pdf

一条****淑淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于Kinect深度信息的智能轮椅动态手势识别方法.pdf
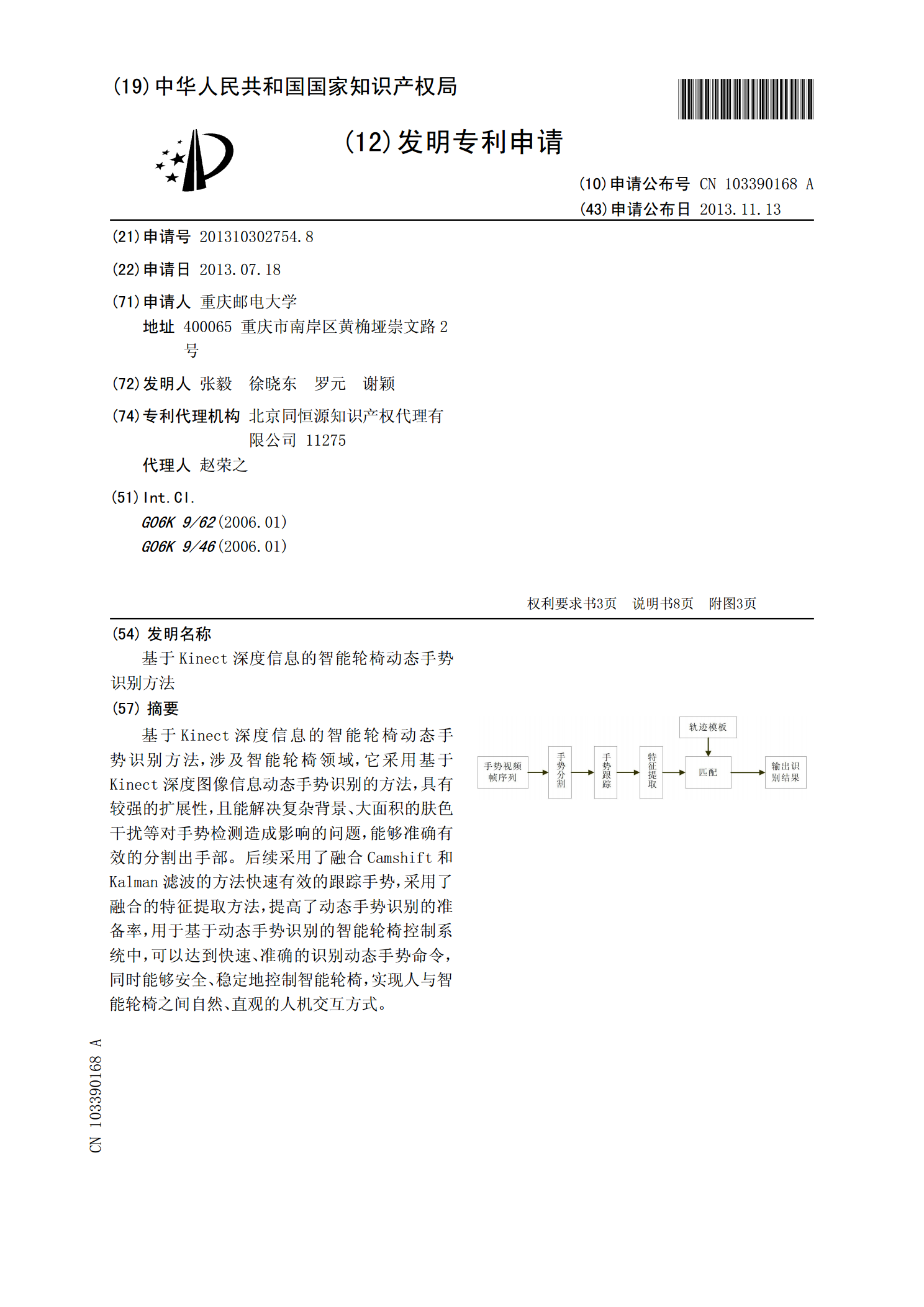
基于Kinect深度信息的智能轮椅动态手势识别方法,涉及智能轮椅领域,它采用基于Kinect深度图像信息动态手势识别的方法,具有较强的扩展性,且能解决复杂背景、大面积的肤色干扰等对手势检测造成影响的问题,能够准确有效的分割出手部。后续采用了融合Camshift和Kalman滤波的方法快速有效的跟踪手势,采用了融合的特征提取方法,提高了动态手势识别的准备率,用于基于动态手势识别的智能轮椅控制系统中,可以达到快速、准确的识别动态手势命令,同时能够安全、稳定地控制智能轮椅,实现人与智能轮椅之间自然、直观的人机交

基于Kinect传感器深度信息的动态手势识别.docx
基于Kinect传感器深度信息的动态手势识别摘要手势识别是人机交互中的重要研究方向之一,目前主要应用于虚拟现实、智能家居、安全监控等领域。本文提出了一种基于Kinect传感器深度信息的动态手势识别算法,该算法通过对深度图像的预处理和特征提取,采用支持向量机(SVM)分类器进行手势识别,实现了高效准确的手势识别。关键词:手势识别,Kinect,深度信息,支持向量机1.引言手势识别是将人类手势中的意义转换为计算机可识别的形式,从而实现人机交互和控制的技术领域。传统的手势识别技术主要基于图像处理和模式匹配,其受

基于Kinect深度信息的手势识别.docx
基于Kinect深度信息的手势识别摘要:本论文研究了基于Kinect深度信息的手势识别技术。通过分析Kinect深度图像的特征,以及利用机器学习算法训练手势模型,实现了对人体手势的实时识别。首先,介绍了Kinect深度传感器的原理和特点,以及其在手势识别中的应用前景。然后,详细讨论了手势识别的关键技术,包括手势特征提取、动作识别和手势语义理解等。接着,提出了一种基于Kinect深度图像的手势识别方法,包括图像预处理、特征提取和分类器设计等步骤。最后,通过实验验证了该方法的有效性和鲁棒性,并对未来的手势识别

基于Kinect深度信息的静态手势识别方法研究的任务书.docx
基于Kinect深度信息的静态手势识别方法研究的任务书任务书一、课题背景随着计算机技术不断发展,人机交互已成为当今的热点问题之一。而计算机视觉技术的应用也越来越广泛,尤其是在手势识别方面的应用受到广泛关注。手势识别技术是计算机视觉技术领域的重要应用之一,可以应用于人机交互、智能家居、虚拟现实等领域。因此,本课题拟基于Kinect深度信息,研究一种静态手势识别方法。二、研究目的和内容本课题旨在研究一种基于Kinect深度信息的静态手势识别方法,实现对静态手势的识别。具体研究内容如下:1.对Kinect设备进

手势识别方法及基于手势识别控制的智能轮椅人机系统.pdf
本发明公开了一种手势识别方法及基于手势识别控制的智能轮椅人机系统,涉及计算机视觉、人机系统、控制领域,包括视频采集模块,分离器,查询模块,跟踪模块,手势预处理模块,特征提取模块,手势识别模块,控制模块,采用Camshift跟踪算法与Kalman滤波算法相结合的方法对人手进行跟踪,并分离出手势,结合Hu矩与支持向量机(SVM)对手势进行识别,该手势识别方法可以滤除肤色干扰、遮挡及周围复杂环境对手势分割的影响,实现对人手的精确跟踪和快速准确识别,用于基于手势识别的智能轮椅人机系统中,可以达到快速、准确的识别手