
基于Kinect传感器深度信息的动态手势识别.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Kinect传感器深度信息的动态手势识别.docx
基于Kinect传感器深度信息的动态手势识别摘要手势识别是人机交互中的重要研究方向之一,目前主要应用于虚拟现实、智能家居、安全监控等领域。本文提出了一种基于Kinect传感器深度信息的动态手势识别算法,该算法通过对深度图像的预处理和特征提取,采用支持向量机(SVM)分类器进行手势识别,实现了高效准确的手势识别。关键词:手势识别,Kinect,深度信息,支持向量机1.引言手势识别是将人类手势中的意义转换为计算机可识别的形式,从而实现人机交互和控制的技术领域。传统的手势识别技术主要基于图像处理和模式匹配,其受

基于Kinect深度信息的手势识别.docx
基于Kinect深度信息的手势识别摘要:本论文研究了基于Kinect深度信息的手势识别技术。通过分析Kinect深度图像的特征,以及利用机器学习算法训练手势模型,实现了对人体手势的实时识别。首先,介绍了Kinect深度传感器的原理和特点,以及其在手势识别中的应用前景。然后,详细讨论了手势识别的关键技术,包括手势特征提取、动作识别和手势语义理解等。接着,提出了一种基于Kinect深度图像的手势识别方法,包括图像预处理、特征提取和分类器设计等步骤。最后,通过实验验证了该方法的有效性和鲁棒性,并对未来的手势识别
基于Kinect深度信息的智能轮椅动态手势识别方法.pdf
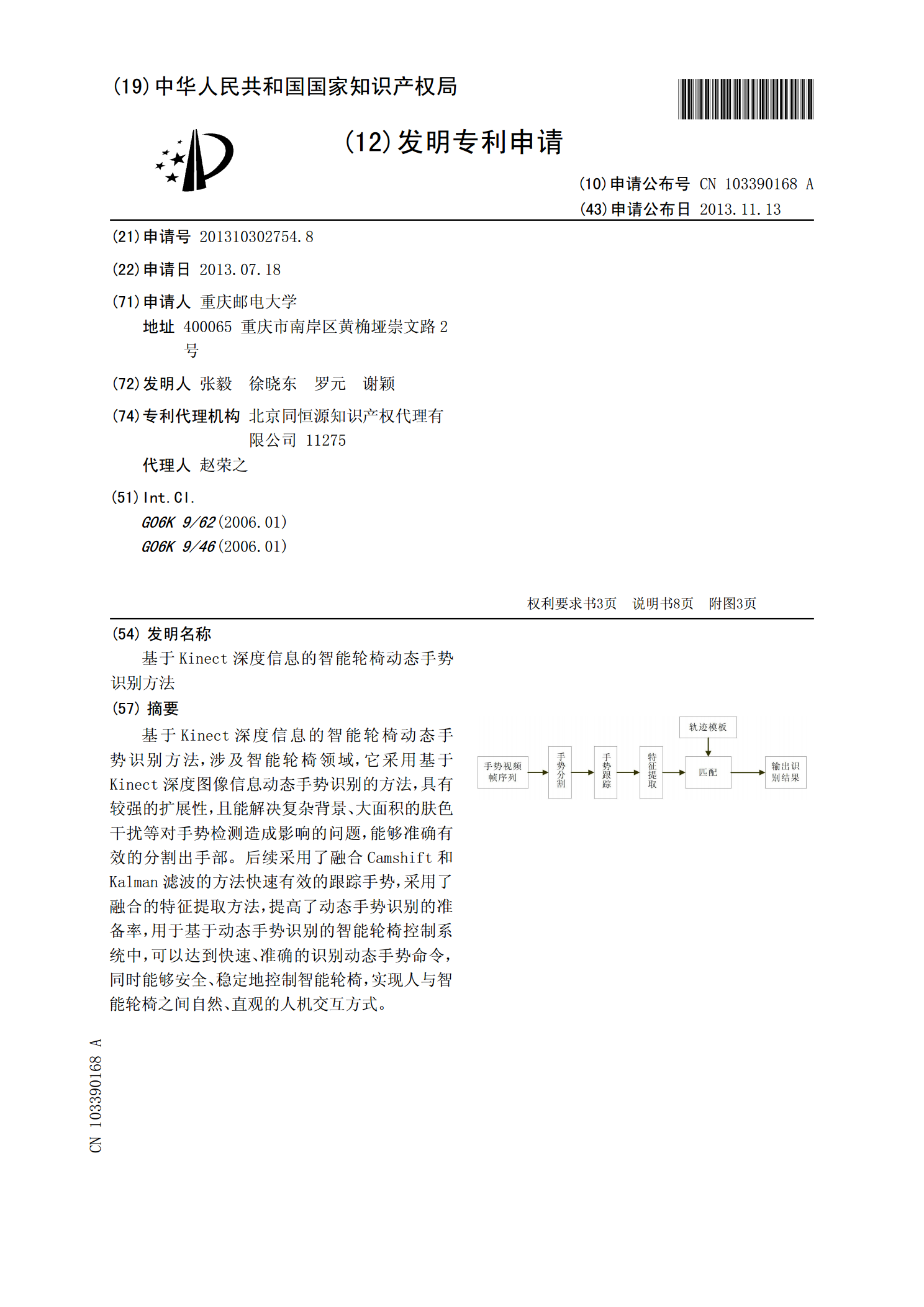
基于Kinect深度信息的智能轮椅动态手势识别方法,涉及智能轮椅领域,它采用基于Kinect深度图像信息动态手势识别的方法,具有较强的扩展性,且能解决复杂背景、大面积的肤色干扰等对手势检测造成影响的问题,能够准确有效的分割出手部。后续采用了融合Camshift和Kalman滤波的方法快速有效的跟踪手势,采用了融合的特征提取方法,提高了动态手势识别的准备率,用于基于动态手势识别的智能轮椅控制系统中,可以达到快速、准确的识别动态手势命令,同时能够安全、稳定地控制智能轮椅,实现人与智能轮椅之间自然、直观的人机交

基于Kinect的动态手势识别.docx
基于Kinect的动态手势识别摘要本文研究了基于Kinect的动态手势识别技术。通过分析手部动态姿势的特征,利用Kinect设备获取人体骨架信息,并计算出手部姿势的关键点位置、角度及运动轨迹等特征,通过建立分类器,对手部动态姿势进行分类。本文还探讨了动态手势识别技术在现实生活中的应用,包括游戏、体育训练、医疗康复等方面。关键词:Kinect;动态手势识别;分类器;应用。AbstractThispaperstudiesthedynamichandgesturerecognitiontechnologybas

基于Kinect深度信息的手势提取与识别研究.docx
基于Kinect深度信息的手势提取与识别研究摘要:本文研究了基于Kinect深度信息的手势提取与识别技术。首先介绍了手势识别技术的应用场景和意义,然后详细介绍了Kinect传感器的工作原理,以及Kinect获取深度信息的原理。随后,本文叙述了手势提取算法的实现过程和步骤,包括深度图像预处理、手部检测、手部姿态估计等几个方面。最后,本文探讨了不同手势识别分类器的性能,并进行了实验验证,验证结果表明,基于Kinect深度信息的手势识别技术具有很好的实用效果。关键词:Kinect;深度信息;手势提取;手势识别;