
一种可伸缩的打印头移动结构.pdf

睿德****找我


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可伸缩的打印头移动结构.pdf
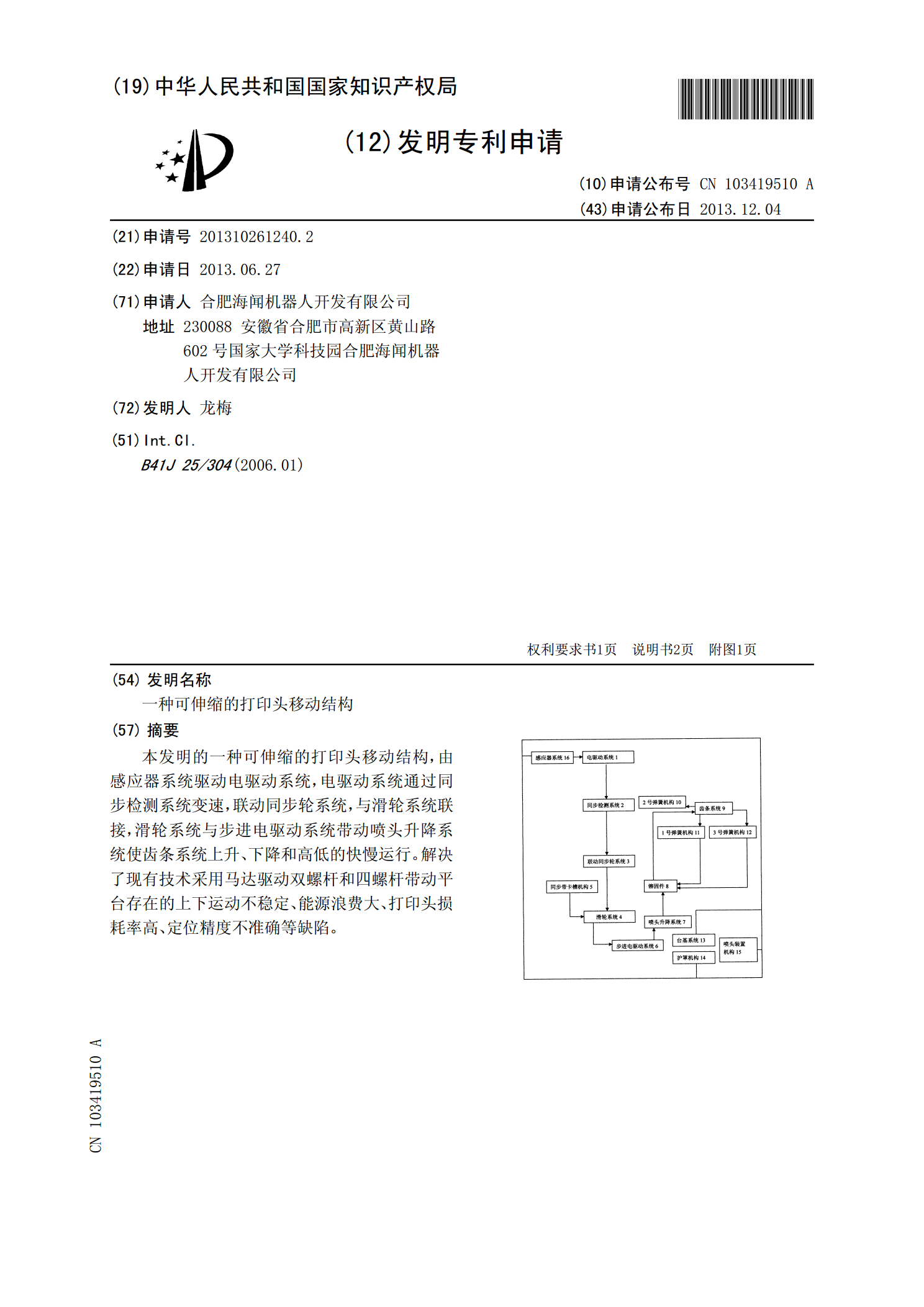
本发明的一种可伸缩的打印头移动结构,由感应器系统驱动电驱动系统,电驱动系统通过同步检测系统变速,联动同步轮系统,与滑轮系统联接,滑轮系统与步进电驱动系统带动喷头升降系统使齿条系统上升、下降和高低的快慢运行。解决了现有技术采用马达驱动双螺杆和四螺杆带动平台存在的上下运动不稳定、能源浪费大、打印头损耗率高、定位精度不准确等缺陷。
一种可移动电脑伸缩架结构.pdf
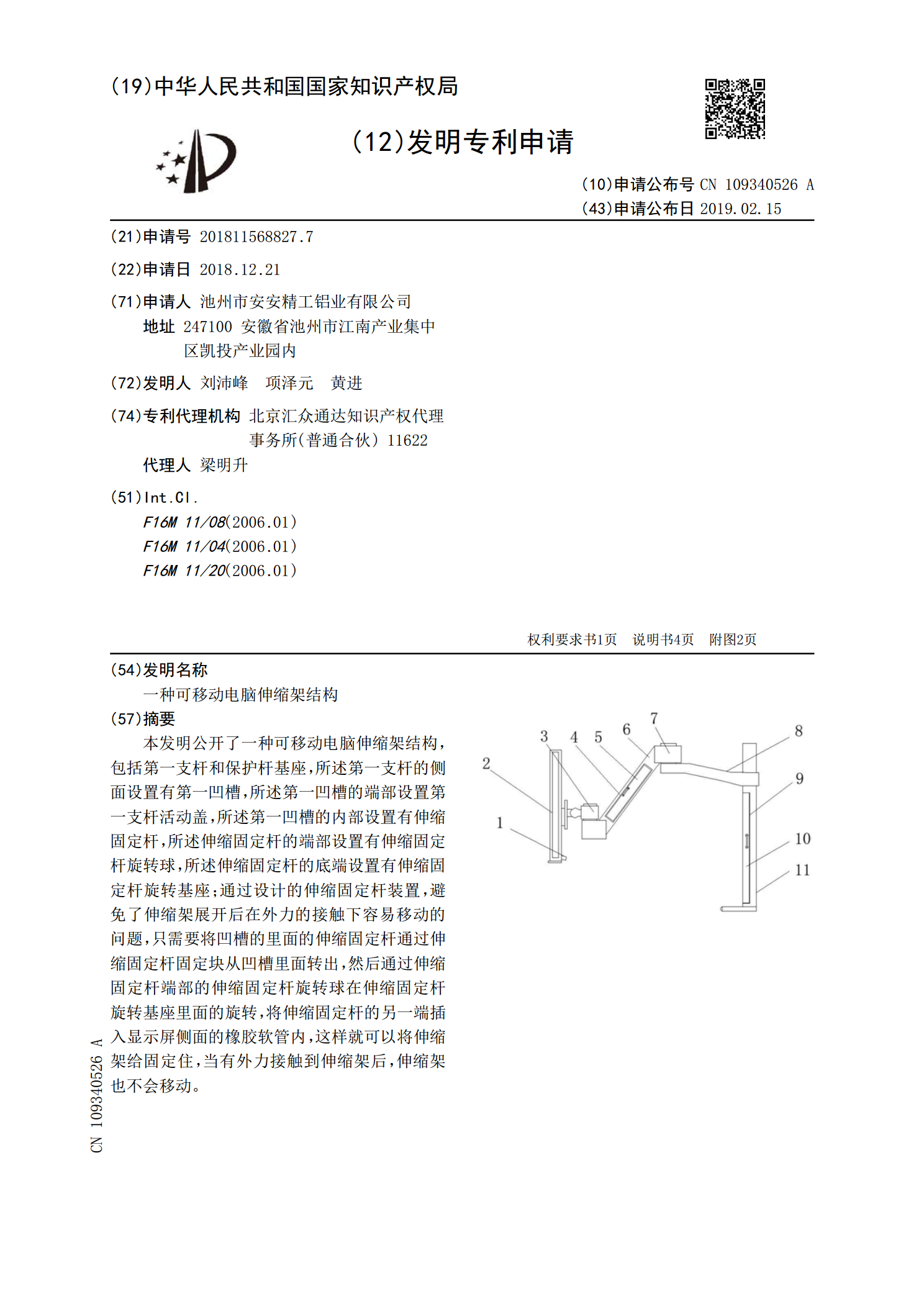
本发明公开了一种可移动电脑伸缩架结构,包括第一支杆和保护杆基座,所述第一支杆的侧面设置有第一凹槽,所述第一凹槽的端部设置第一支杆活动盖,所述第一凹槽的内部设置有伸缩固定杆,所述伸缩固定杆的端部设置有伸缩固定杆旋转球,所述伸缩固定杆的底端设置有伸缩固定杆旋转基座;通过设计的伸缩固定杆装置,避免了伸缩架展开后在外力的接触下容易移动的问题,只需要将凹槽的里面的伸缩固定杆通过伸缩固定杆固定块从凹槽里面转出,然后通过伸缩固定杆端部的伸缩固定杆旋转球在伸缩固定杆旋转基座里面的旋转,将伸缩固定杆的另一端插入显示屏侧面的
一种可伸缩折叠的钢结构移动车库.pdf
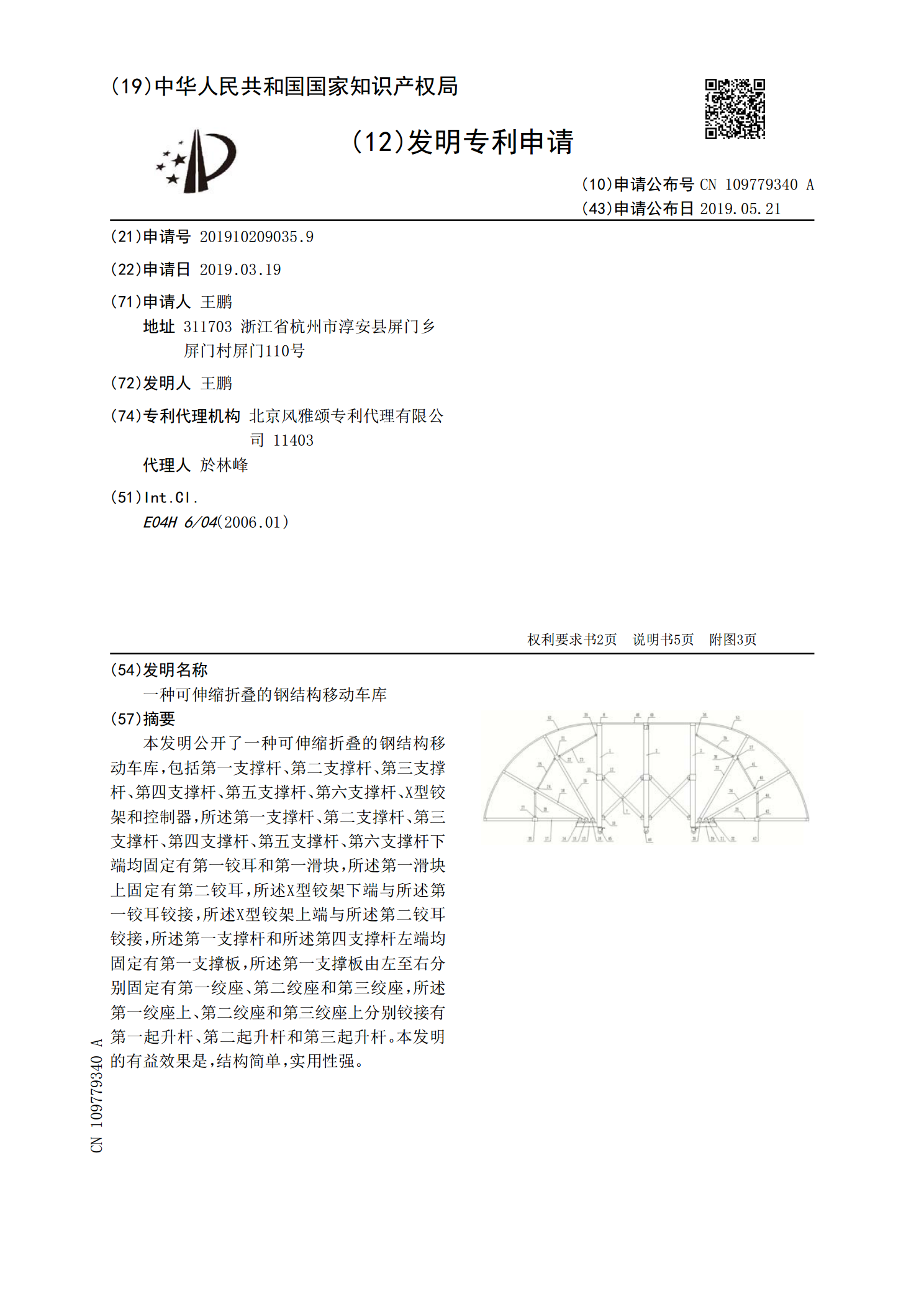
本发明公开了一种可伸缩折叠的钢结构移动车库,包括第一支撑杆、第二支撑杆、第三支撑杆、第四支撑杆、第五支撑杆、第六支撑杆、X型铰架和控制器,所述第一支撑杆、第二支撑杆、第三支撑杆、第四支撑杆、第五支撑杆、第六支撑杆下端均固定有第一铰耳和第一滑块,所述第一滑块上固定有第二铰耳,所述X型铰架下端与所述第一铰耳铰接,所述X型铰架上端与所述第二铰耳铰接,所述第一支撑杆和所述第四支撑杆左端均固定有第一支撑板,所述第一支撑板由左至右分别固定有第一绞座、第二绞座和第三绞座,所述第一绞座上、第二绞座和第三绞座上分别铰接有第
一种移动停车装置的可伸缩支腿结构.pdf
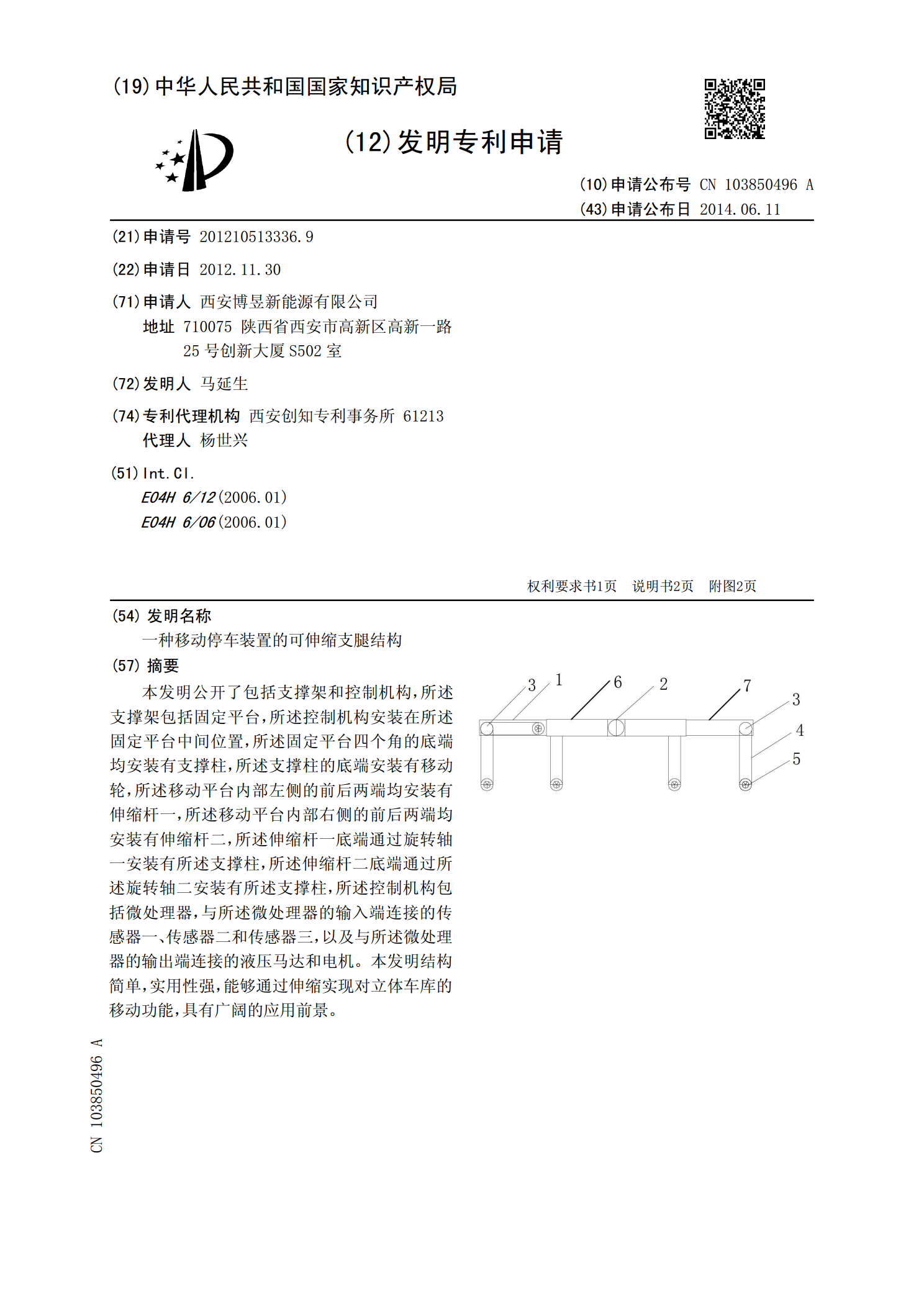
本发明公开了包括支撑架和控制机构,所述支撑架包括固定平台,所述控制机构安装在所述固定平台中间位置,所述固定平台四个角的底端均安装有支撑柱,所述支撑柱的底端安装有移动轮,所述移动平台内部左侧的前后两端均安装有伸缩杆一,所述移动平台内部右侧的前后两端均安装有伸缩杆二,所述伸缩杆一底端通过旋转轴一安装有所述支撑柱,所述伸缩杆二底端通过所述旋转轴二安装有所述支撑柱,所述控制机构包括微处理器,与所述微处理器的输入端连接的传感器一、传感器二和传感器三,以及与所述微处理器的输出端连接的液压马达和电机。本发明结构简单,实
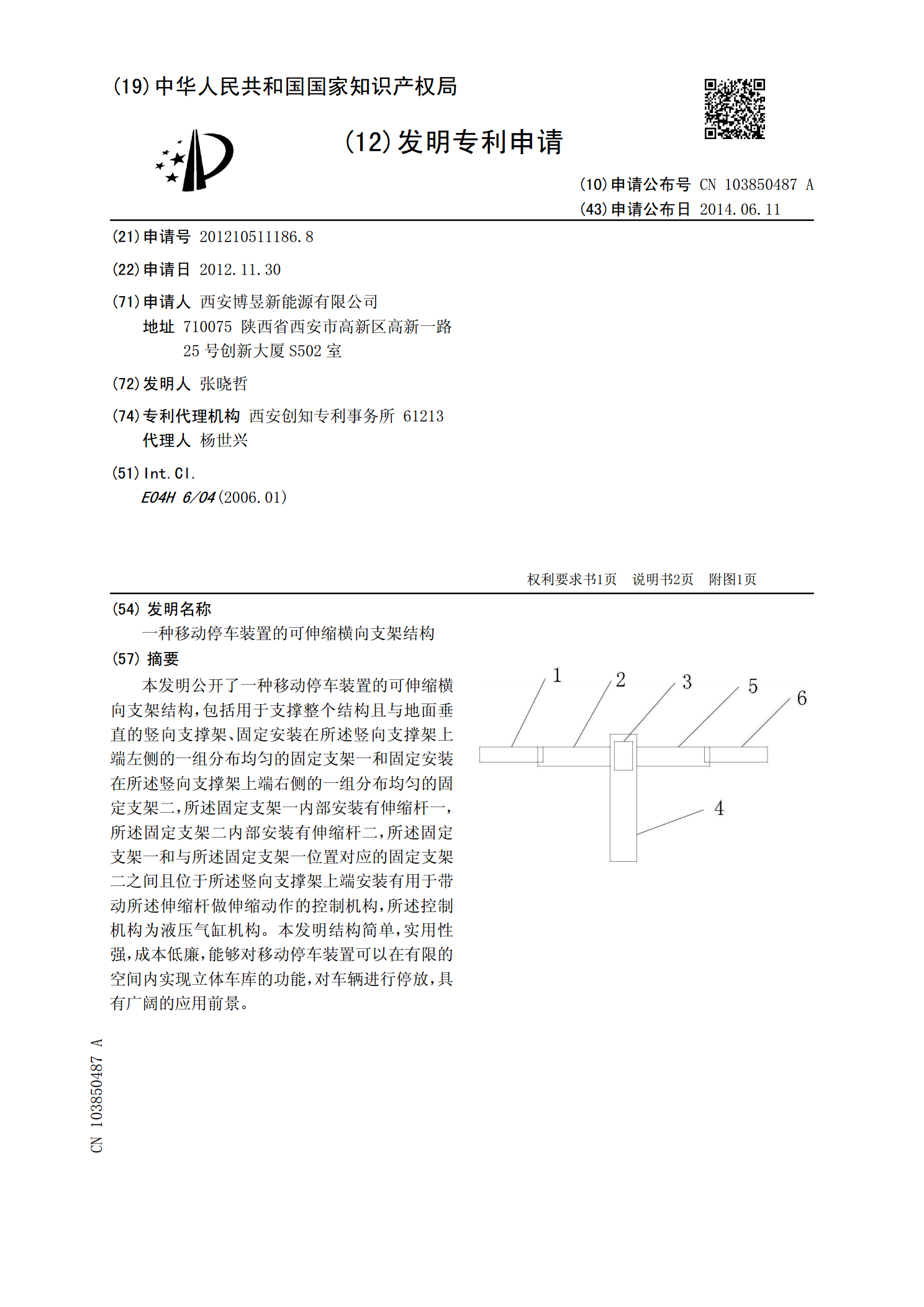
一种移动停车装置的可伸缩横向支架结构.pdf
本发明公开了一种移动停车装置的可伸缩横向支架结构,包括用于支撑整个结构且与地面垂直的竖向支撑架、固定安装在所述竖向支撑架上端左侧的一组分布均匀的固定支架一和固定安装在所述竖向支撑架上端右侧的一组分布均匀的固定支架二,所述固定支架一内部安装有伸缩杆一,所述固定支架二内部安装有伸缩杆二,所述固定支架一和与所述固定支架一位置对应的固定支架二之间且位于所述竖向支撑架上端安装有用于带动所述伸缩杆做伸缩动作的控制机构,所述控制机构为液压气缸机构。本发明结构简单,实用性强,成本低廉,能够对移动停车装置可以在有限的空间内