
工业用机器人的手腕装置.pdf

努力****绮亦


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工业用机器人的手腕装置.pdf
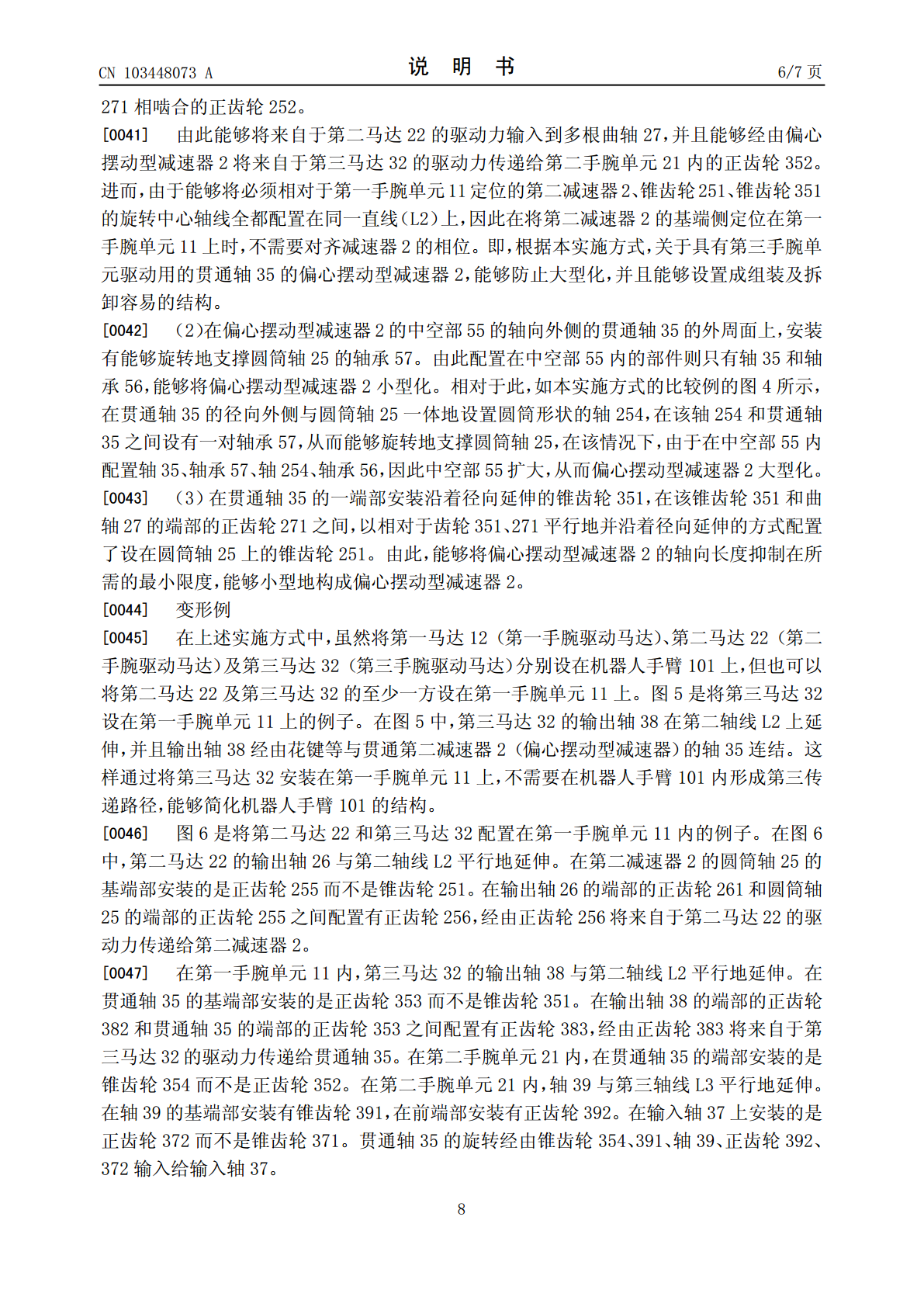
本发明提供一种具备偏心摆动型减速器的工业用机器人的手腕装置。偏心摆动型减速器具备:贯通孔,沿着轴线形成中空部;贯通轴,贯通中空部并能够旋转地被支撑,并且将来自于第三手腕驱动马达的旋转从第一手腕单元侧传递到第二手腕单元侧;曲轴,在贯通轴的周围配置多根,并且分别在第一手腕单元侧的端部具有输入齿轮;以及齿轮部件,能够以轴线为中心旋转地设置,并且具有输入来自于第二手腕驱动马达的旋转力的第一齿轮、和分别与多根曲轴的输入齿轮相啮合的第二齿轮。
工业机器人手腕的测试装置.pdf
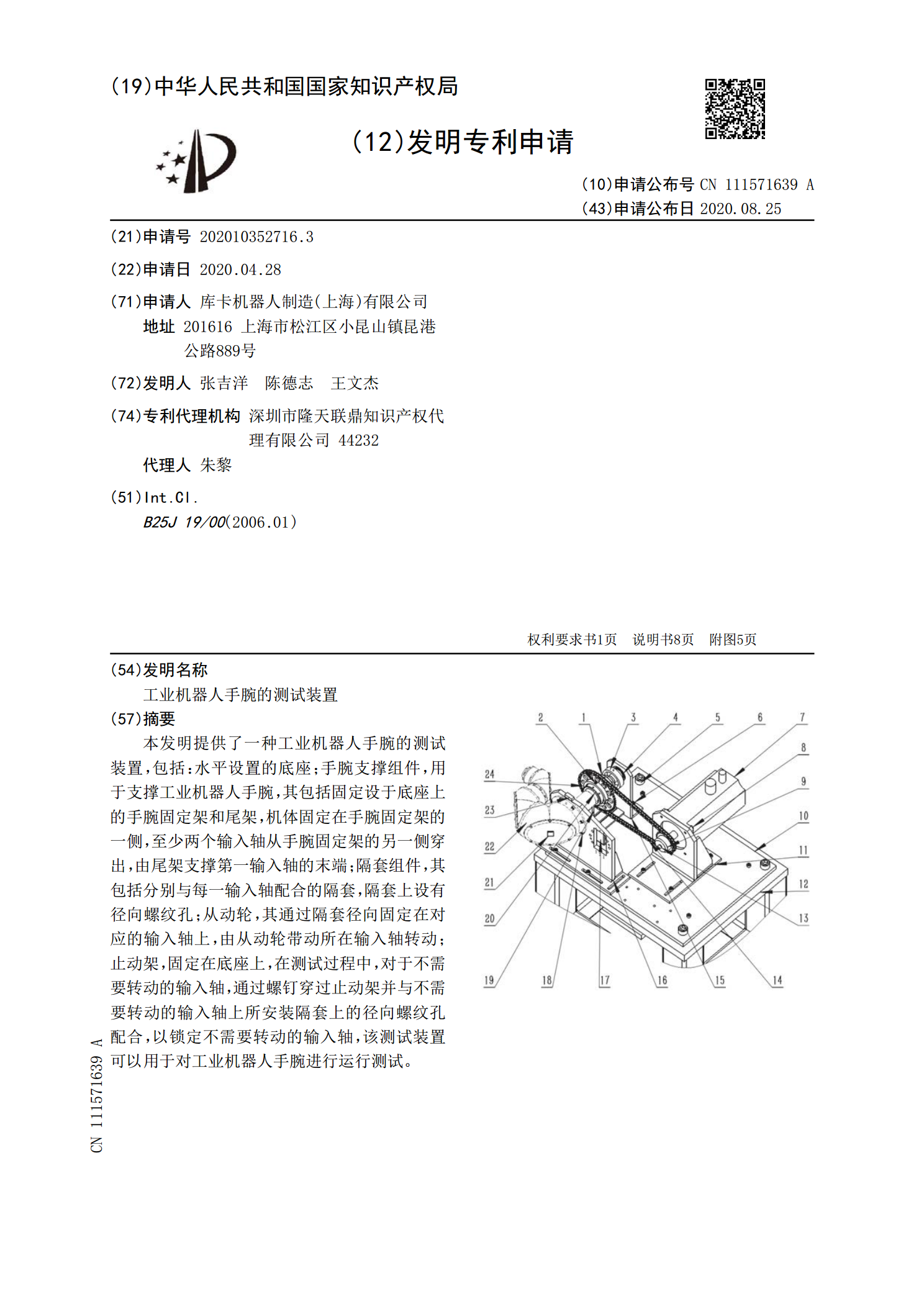
本发明提供了一种工业机器人手腕的测试装置,包括:水平设置的底座;手腕支撑组件,用于支撑工业机器人手腕,其包括固定设于底座上的手腕固定架和尾架,机体固定在手腕固定架的一侧,至少两个输入轴从手腕固定架的另一侧穿出,由尾架支撑第一输入轴的末端;隔套组件,其包括分别与每一输入轴配合的隔套,隔套上设有径向螺纹孔;从动轮,其通过隔套径向固定在对应的输入轴上,由从动轮带动所在输入轴转动;止动架,固定在底座上,在测试过程中,对于不需要转动的输入轴,通过螺钉穿过止动架并与不需要转动的输入轴上所安装隔套上的径向螺纹孔配合,以

工业用机器人的手腕结构部.pdf
本发明提供工业用机器人的手腕结构部。减速机构部包括安装在手腕内框驱动马达的输出轴上的第一正齿轮、能旋转地支撑在安装于手腕外壳用机框上的第一辅助轴上的第二正齿轮、与第二正齿轮一体且能旋转地支撑在第一辅助轴上的第三正齿轮、能旋转地支撑在第二辅助轴上的第四正齿轮、与第四正齿轮一体且能旋转地支撑在第二辅助轴上的五正齿轮、能旋转地支撑在第三辅助轴上的第六正齿轮、以及安装在手腕内框的转动轴上并与第六齿轮配合的第七正齿轮,第四正齿轮比第一正齿轮靠近手腕外壳用机框而配置。

一种工业用机器人手腕.pdf
本发明公开了一种工业用机器人手腕,包括手腕体和手腕连接体,所述手腕体和手腕连接体之间通过轴承相连定位,所述手腕体和手腕连接体之间配合处形成有间隙迷宫结构,所述间隙迷宫结构位于轴承的外侧。该工业用机器人手腕结构设计合理,依靠油封及间隙迷宫密封结构实现机器人手腕部位的双层密封,显著的提高机器人手腕的防护等级;同时,由于油封与轴承几乎处于同一安装面,不会增加机器人手腕宽度,不仅保证机器人手腕的刚性,也能使得机器人手腕部位的尺寸更加紧凑,满足更多的应用领域;密封性能优越,降低机器人手腕的维护成本,提高机器人的使用

排出装置和工业用机器人.pdf
本发明提供排出装置和工业用机器人。该排出装置能够以比较容易的结构去除残留在排出喷嘴、输送流路的排出材料,而且,能够抑制成本且以容易清扫的构造赋予防垂下性能。该排出装置包括:喷嘴头,其具有用于输送排出材料的多个输送流路和与输送流路连通并用于去除残留在输送流路的排出材料的去除流路;多个排出喷嘴,其与多个输送流路分别连接而安装于喷嘴头;送出管,其选择性地向多个输送流路中的任一输送流路送出排出材料,并使排出材料自排出喷嘴排出;以及抽吸管,其与去除流路连接,用于通过去除流路抽吸残留在输送流路和排出喷嘴的排出材料。