
高空气球高度控制装置.pdf

新槐****公主


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高空气球高度控制装置.pdf
高空气球高度控制装置,导管、活塞、变速齿轮组、卫星信号处理单元、处理器、供电单元、微型电机及驱动电路、卫星接收天线、上半部外壳、下半部外壳、挂环和地面接收控制软件等组成。本装置解决了高高空气球释放后,无法控制高度的难题。空气球高度控制装置采用卫星中继通信技术,实现对高空气球高度的远程监控。本装置通过控制活塞与导管上排气孔的关闭,来控制气球内气体的排放,从而改变气球体积,实现高空气球高度按照预定值降低。
高空气球发放装置.pdf
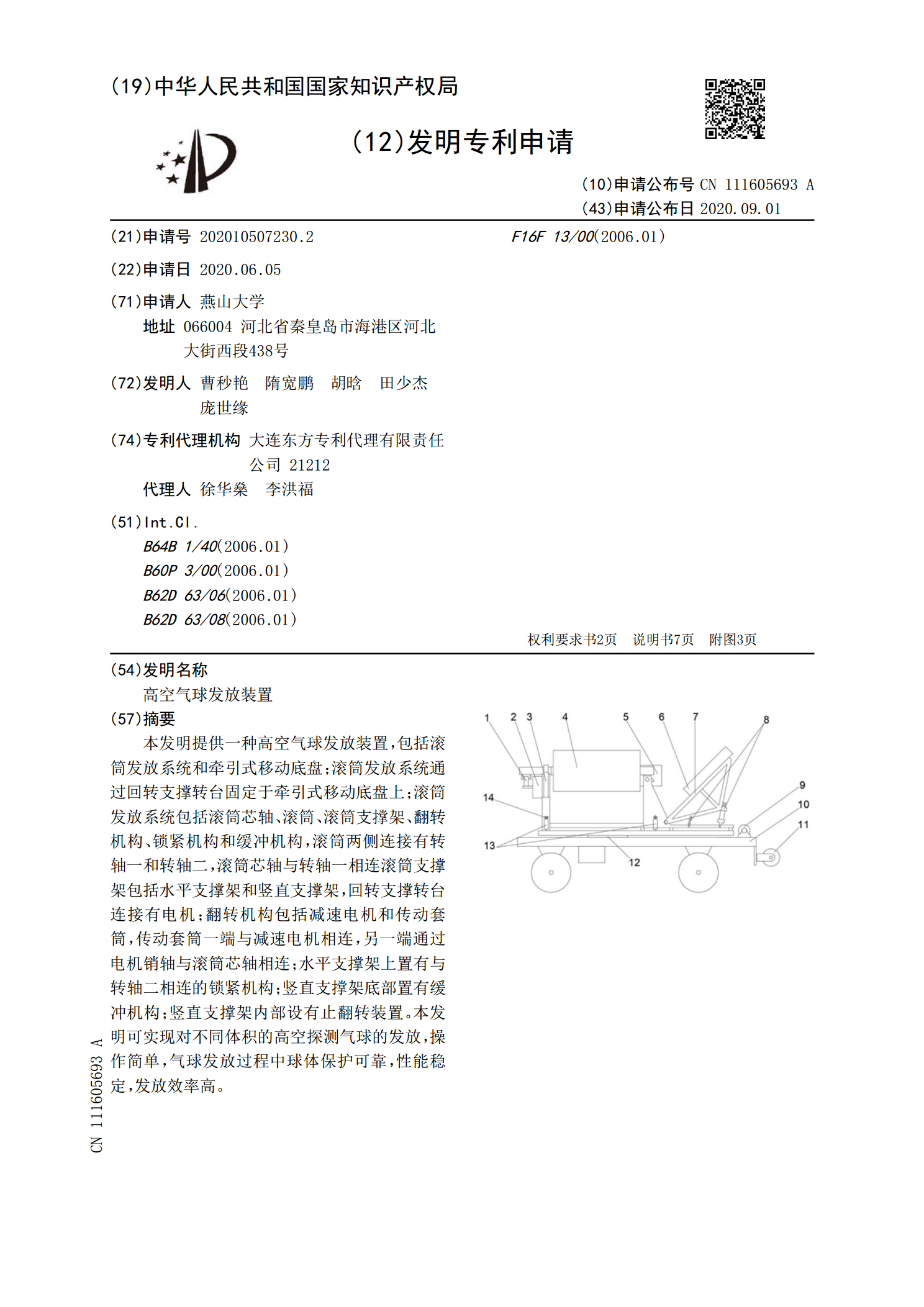
本发明提供一种高空气球发放装置,包括滚筒发放系统和牵引式移动底盘;滚筒发放系统通过回转支撑转台固定于牵引式移动底盘上;滚筒发放系统包括滚筒芯轴、滚筒、滚筒支撑架、翻转机构、锁紧机构和缓冲机构,滚筒两侧连接有转轴一和转轴二,滚筒芯轴与转轴一相连滚筒支撑架包括水平支撑架和竖直支撑架,回转支撑转台连接有电机;翻转机构包括减速电机和传动套筒,传动套筒一端与减速电机相连,另一端通过电机销轴与滚筒芯轴相连;水平支撑架上置有与转轴二相连的锁紧机构;竖直支撑架底部置有缓冲机构;竖直支撑架内部设有止翻转装置。本发明可实现对

一种高度与轨迹可控的高空气球.pdf
本发明主要创新点在于提出了一种控制高空气球升降的装置和一种高空气球的轨迹控制方法。高空气球的浮力单元(1)由蒙皮、承力带、承力绳索等组成。本发明可通过设置在浮力单元(1)上的浮力单元体积调整装置(2),改变浮力单元的体积,进而改变高空气球浮力,实现高空气球的上升和下降控制;并依据平流层不同高度的风速和风向差异实现高空气球的轨迹控制。本发明提供了一种无需释放高空气球内部浮升气体即可实现高空气球高度与轨迹控制的方案,使高空气球具备了长时区域驻留的能力。
一种高空气球地面发射装置.pdf
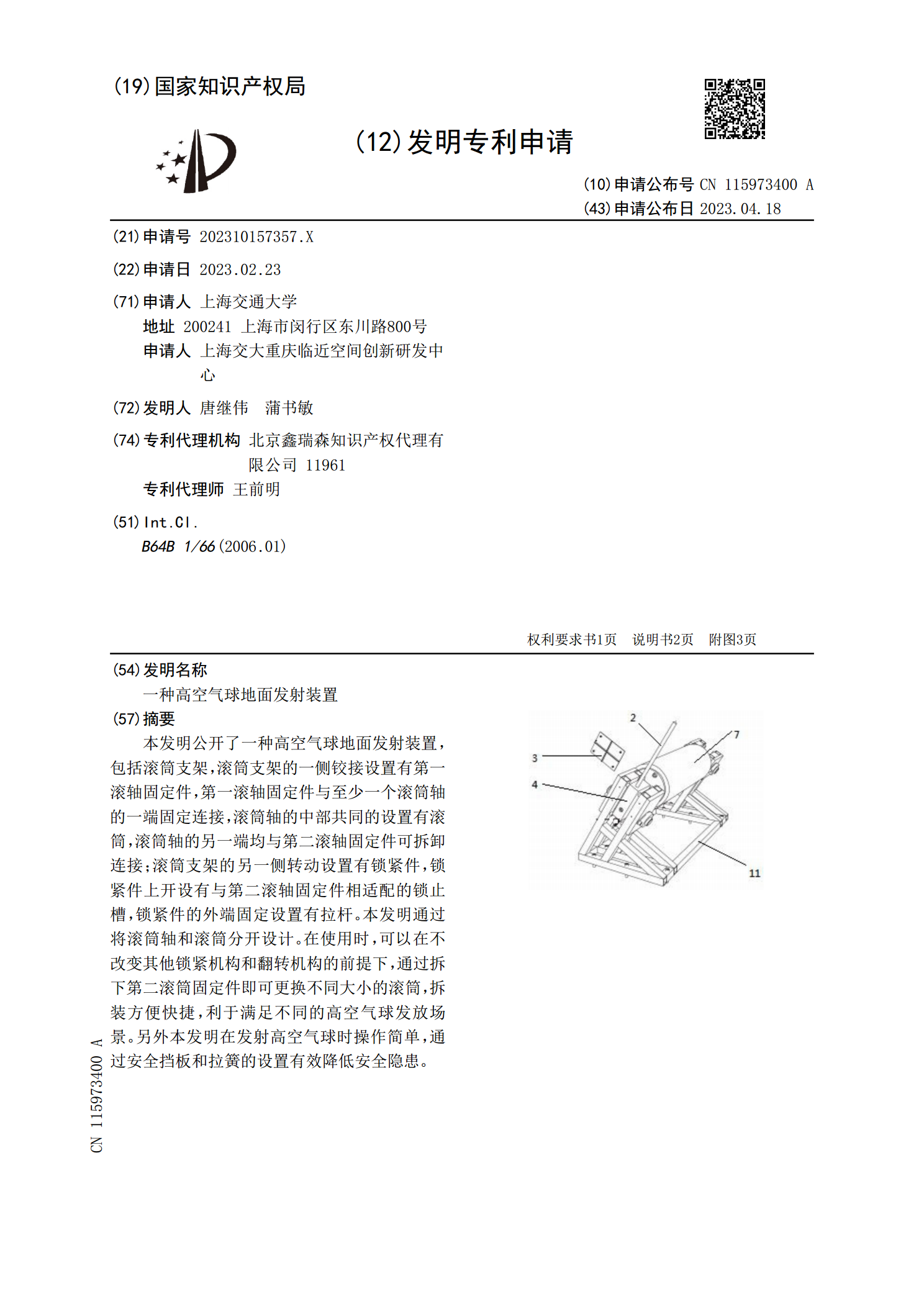
本发明公开了一种高空气球地面发射装置,包括滚筒支架,滚筒支架的一侧铰接设置有第一滚轴固定件,第一滚轴固定件与至少一个滚筒轴的一端固定连接,滚筒轴的中部共同的设置有滚筒,滚筒轴的另一端均与第二滚轴固定件可拆卸连接;滚筒支架的另一侧转动设置有锁紧件,锁紧件上开设有与第二滚轴固定件相适配的锁止槽,锁紧件的外端固定设置有拉杆。本发明通过将滚筒轴和滚筒分开设计。在使用时,可以在不改变其他锁紧机构和翻转机构的前提下,通过拆下第二滚筒固定件即可更换不同大小的滚筒,拆装方便快捷,利于满足不同的高空气球发放场景。另外本发明
一种高空气球释放配重物装置.pdf
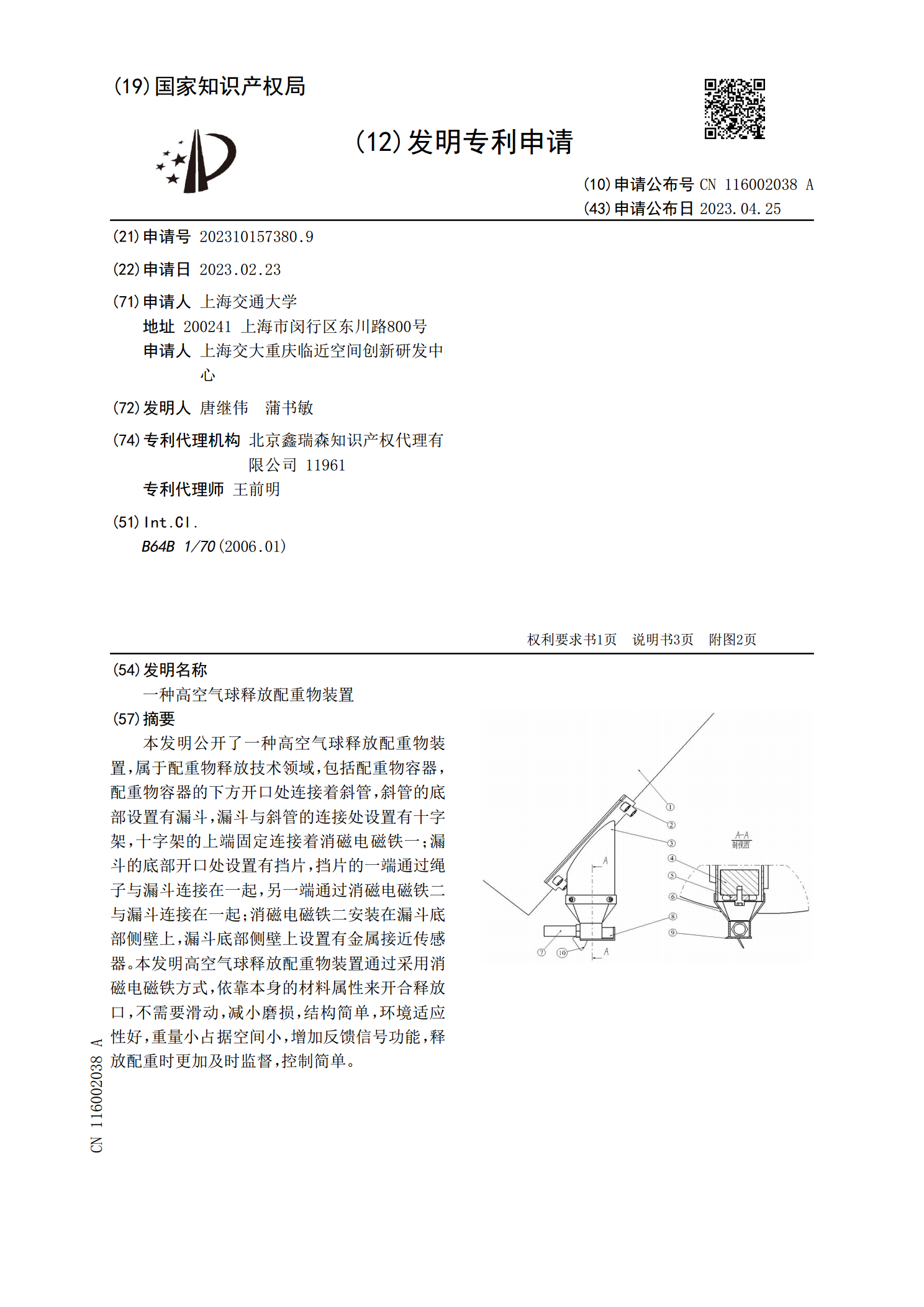
本发明公开了一种高空气球释放配重物装置,属于配重物释放技术领域,包括配重物容器,配重物容器的下方开口处连接着斜管,斜管的底部设置有漏斗,漏斗与斜管的连接处设置有十字架,十字架的上端固定连接着消磁电磁铁一;漏斗的底部开口处设置有挡片,挡片的一端通过绳子与漏斗连接在一起,另一端通过消磁电磁铁二与漏斗连接在一起;消磁电磁铁二安装在漏斗底部侧壁上,漏斗底部侧壁上设置有金属接近传感器。本发明高空气球释放配重物装置通过采用消磁电磁铁方式,依靠本身的材料属性来开合释放口,不需要滑动,减小磨损,结构简单,环境适应性好,重