
一种悬臂式提升机构.pdf

是笛****加盟


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种悬臂式提升机构.pdf
本发明公开了一种悬臂式提升机构,应用于机器人上料阶段托盘承载。其包括竖直布置的机架、驱动电机、制动器、传动组件、导轨和载物台,其中,所述驱动电机安装于机架上,所述制动器装配于所述驱动电机的驱动端,所述传动组件为传动链条,所述导轨安装于机架上,所述载物台通过连接座可上下移动地装配于机架上,所述连接座上配合所述导轨设置有导向轮。上述悬臂式提升机构电机为中置且配有刹车,因此提升速度可达80米/分,振动小,同时也获得良好的自锁性;且配有减速机的电机在制动状态锁定力也非常可靠,链条采用滚子链,刚性高,这就使得在上料

一种新型单悬臂式撑箱机构.pdf
本发明公开了一种新型单悬臂式撑箱机构,所述新型单悬臂式撑箱机构整体为倾斜设计,包括撑箱悬臂机构和单悬臂调节机构;所述撑箱悬臂机构主要采用气缸连杆机构,气缸位置偏移悬臂杆一侧,通过连杆与悬臂杆相连,并且将气缸的上下运动转换成悬臂杆的摆动运动,实现机构的撑箱动作;所述单悬臂调节机构将传统的两侧支撑结构改为单侧支撑结构,支撑侧以调节丝杆为主要支撑点,辅以直线导轨作为次要支撑并起到固定姿态作用。本发明的优点在于:独创的机构设计,能够满足纸箱在倾斜的工况下进行撑箱,并再过渡到水平方向,填补了目前设计的空白。并且这种
一种悬臂式液下泵用口环机构.pdf
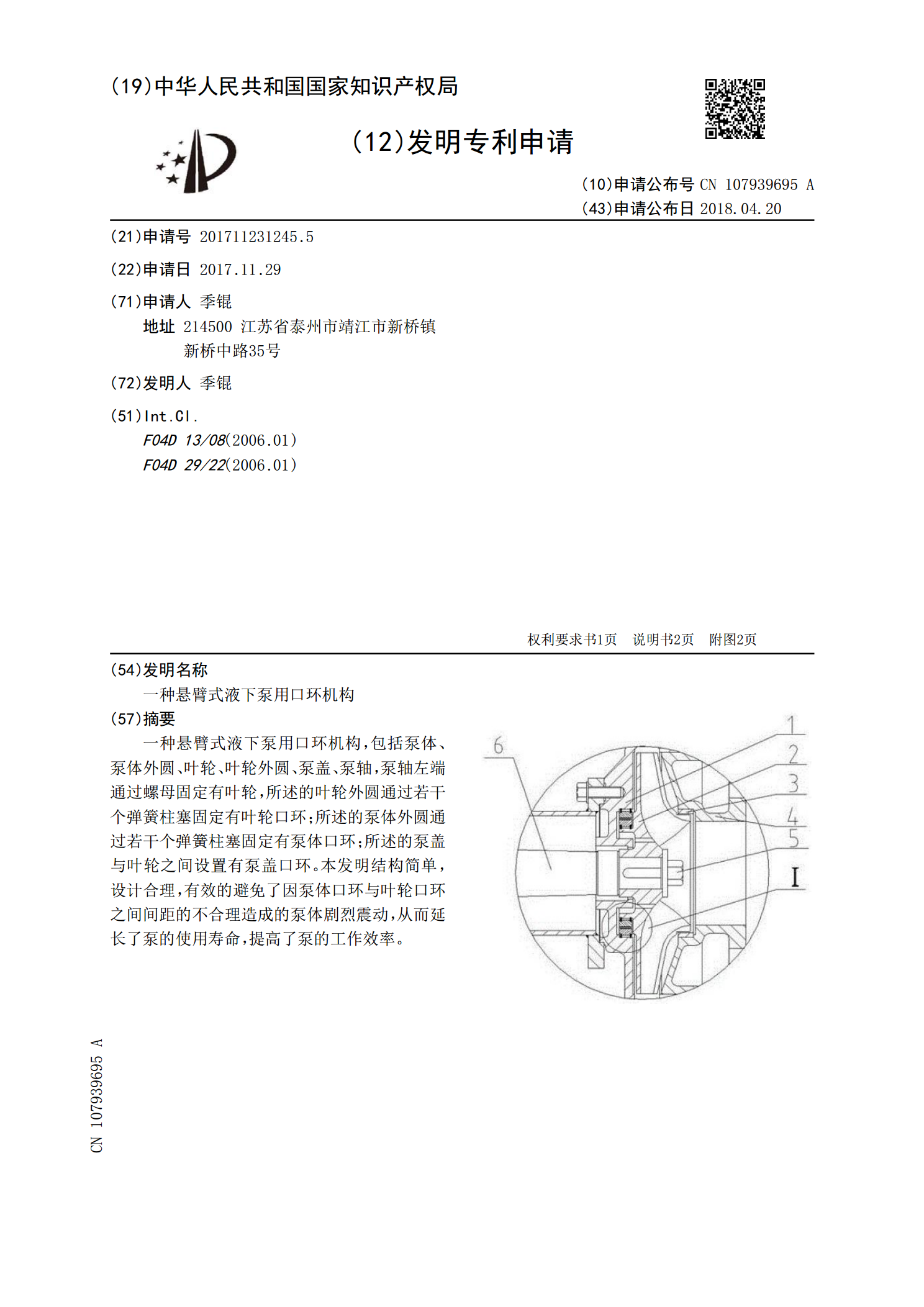
一种悬臂式液下泵用口环机构,包括泵体、泵体外圆、叶轮、叶轮外圆、泵盖、泵轴,泵轴左端通过螺母固定有叶轮,所述的叶轮外圆通过若干个弹簧柱塞固定有叶轮口环;所述的泵体外圆通过若干个弹簧柱塞固定有泵体口环;所述的泵盖与叶轮之间设置有泵盖口环。本发明结构简单,设计合理,有效的避免了因泵体口环与叶轮口环之间间距的不合理造成的泵体剧烈震动,从而延长了泵的使用寿命,提高了泵的工作效率。
一种悬臂式液下泵用口环机构.pdf
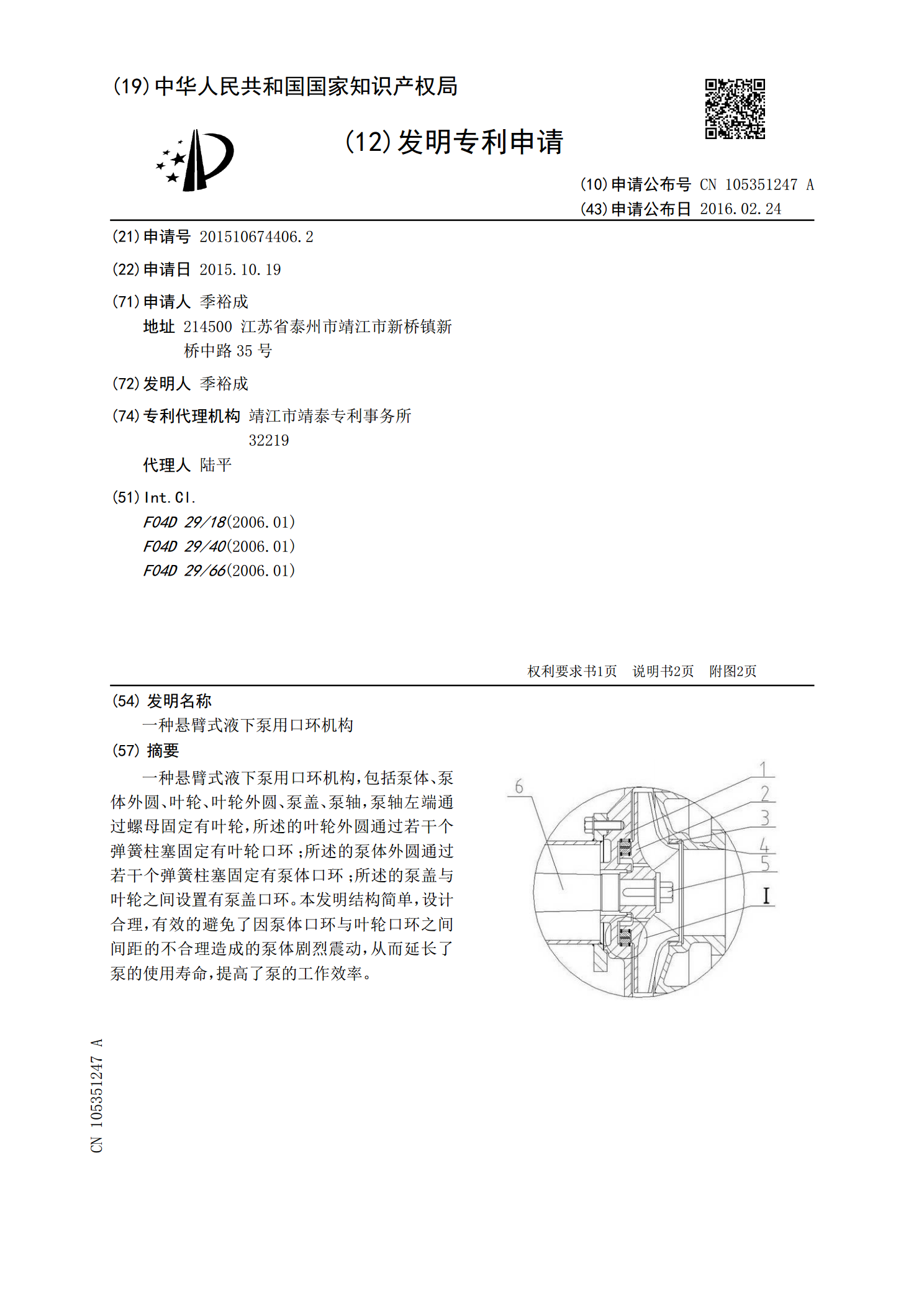
一种悬臂式液下泵用口环机构,包括泵体、泵体外圆、叶轮、叶轮外圆、泵盖、泵轴,泵轴左端通过螺母固定有叶轮,所述的叶轮外圆通过若干个弹簧柱塞固定有叶轮口环;所述的泵体外圆通过若干个弹簧柱塞固定有泵体口环;所述的泵盖与叶轮之间设置有泵盖口环。本发明结构简单,设计合理,有效的避免了因泵体口环与叶轮口环之间间距的不合理造成的泵体剧烈震动,从而延长了泵的使用寿命,提高了泵的工作效率。

一种悬臂式可升降安装维护机构.pdf
本发明公开了一种悬臂式可升降安装维护机构,包括升降机和延伸悬臂组件,升降机包括悬梁臂、升降装置和底座,升降装置设置于悬梁臂和底座之间,延伸悬臂组件包括延伸悬臂、长支撑杆、斜拉杆和限位卡板组件,延伸悬臂的一端与悬梁臂连接、另一端与长支撑杆的上端转动连接,斜拉杆的上端与延伸悬臂靠近悬梁臂的一端转动连接、下端通过限位卡板组件与长支撑杆卡接,限位卡板组件与长支撑杆的卡接位置可调。本发明通过专门设计的升降机和延伸悬臂组件,可实现悬臂式可升降安装维的工作模式,机构整体结构大大简化,组装过程简易、安全性高、成本较低。