
核电站反应堆压力容器内管状部件表面智能扫查方法.pdf

Jo****34

1/10
2/10

3/10

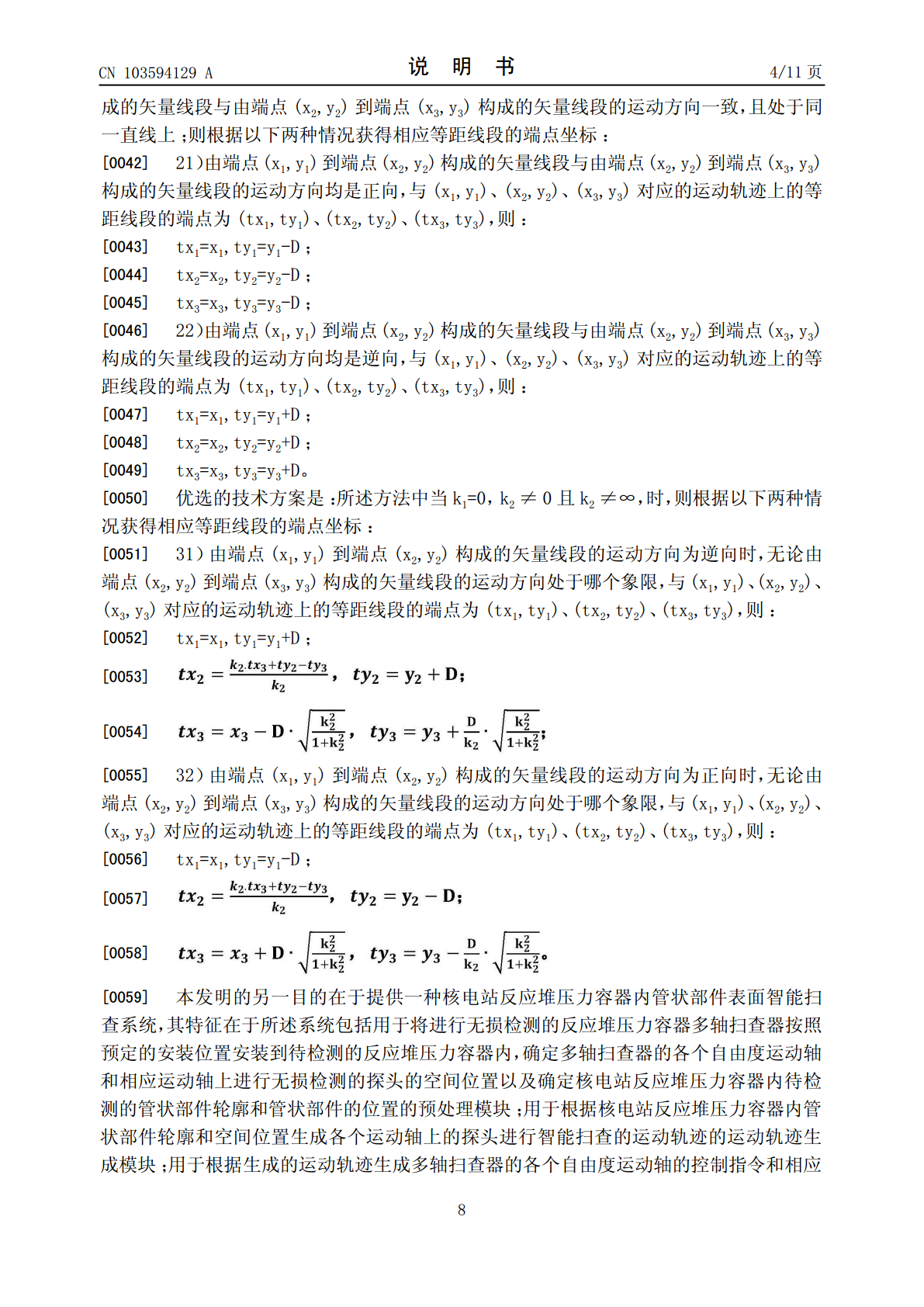
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

核电站反应堆压力容器内管状部件表面智能扫查方法.pdf
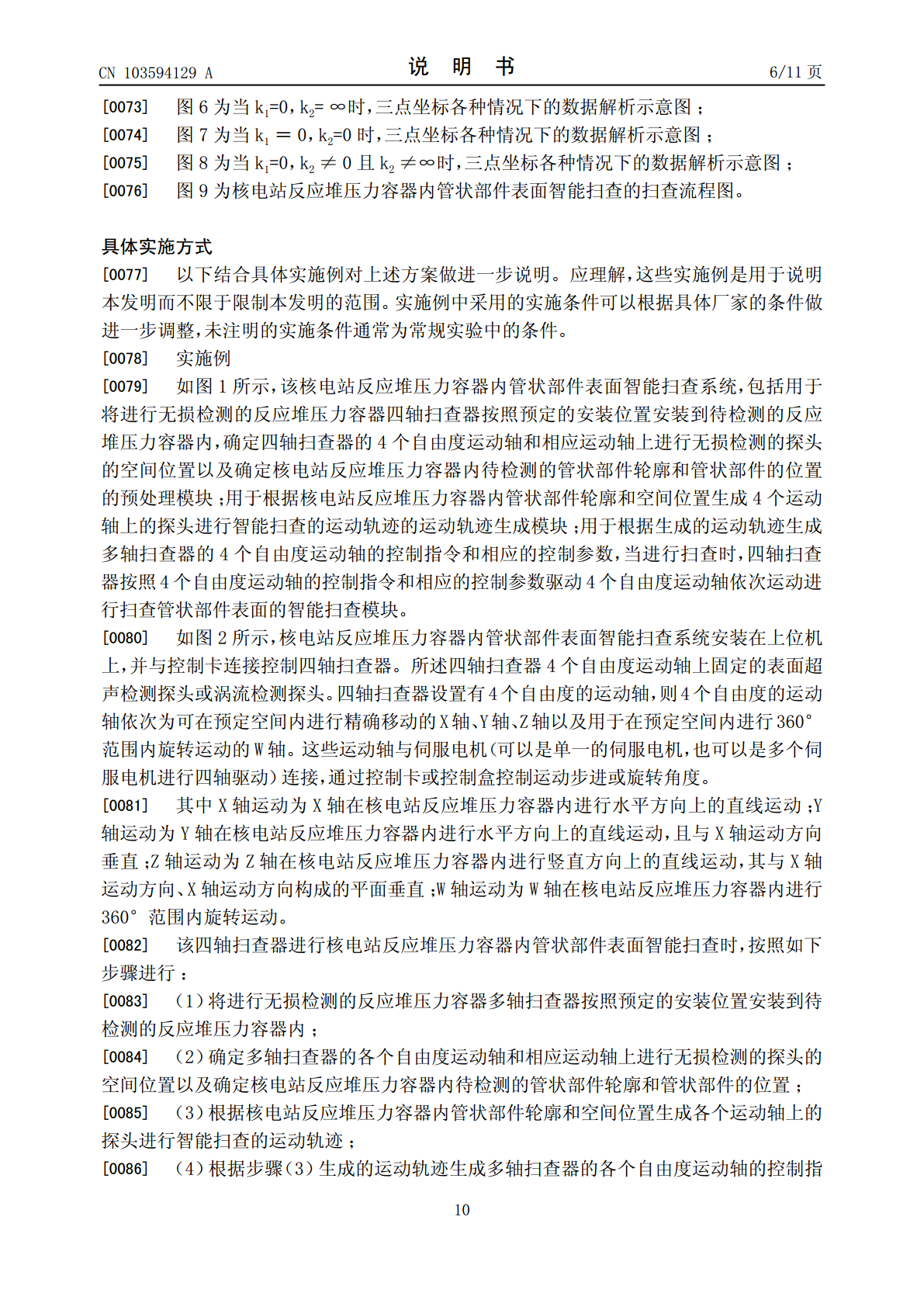
本发明公开了一种核电站反应堆压力容器内管状部件表面智能扫查方法,包括以下步骤:(1)将进行无损检测的反应堆压力容器多轴扫查器按照预定的安装位置安装到待检测的反应堆压力容器内;(2)确定多轴扫查器的各个自由度运动轴和相应运动轴上进行无损检测的探头的空间位置以及确定核电站反应堆压力容器内待检测的管状部件轮廓和管状部件的位置;(3)根据核电站反应堆压力容器内管状部件轮廓和空间位置生成各个运动轴上的探头进行智能扫查的运动轨迹;(4)根据步骤(3)生成的运动轨迹生成多轴扫查器的各个自由度运动轴的控制指令和相应的控制
一种反应堆压力容器外表面扫查装置.pdf
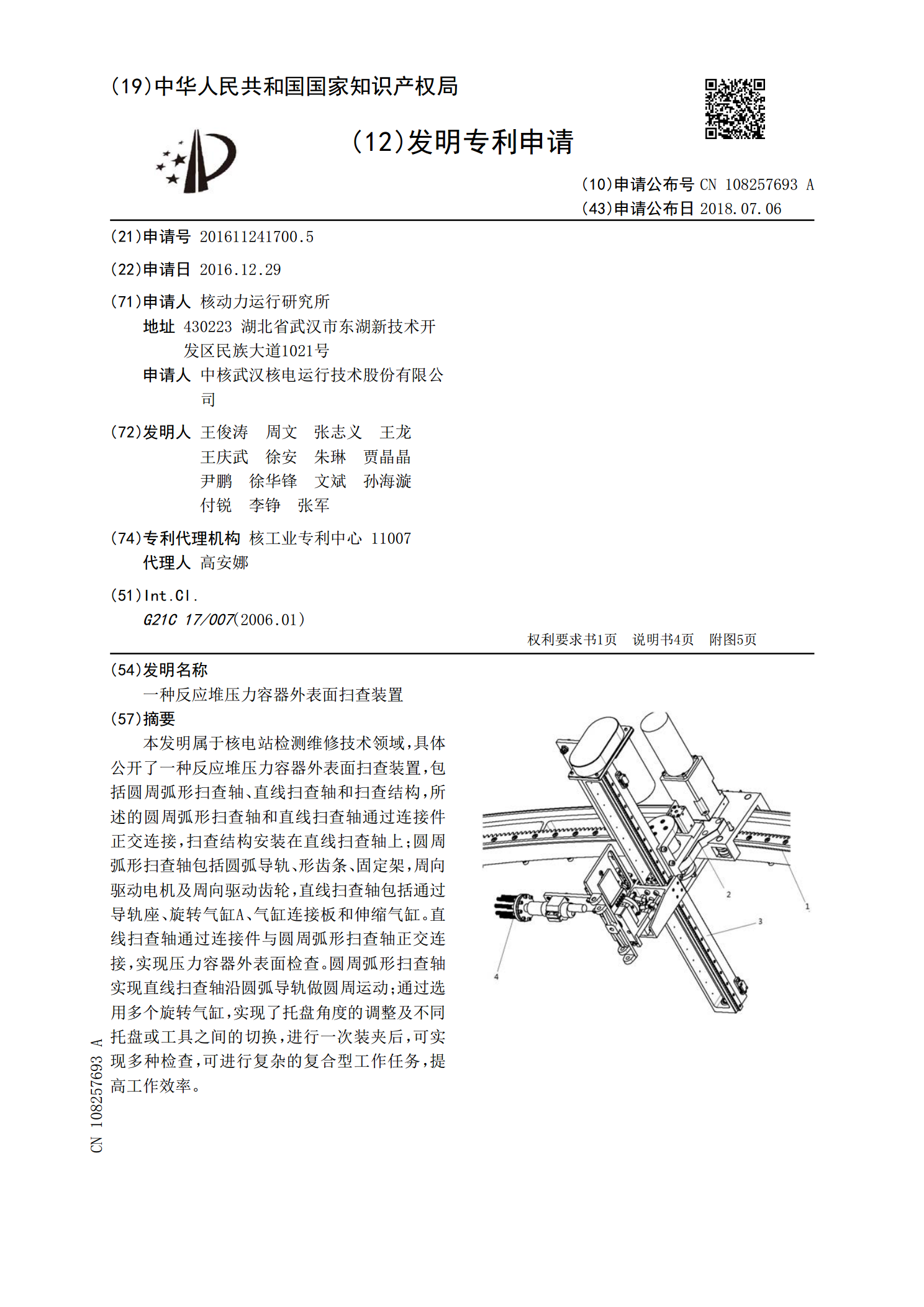
本发明属于核电站检测维修技术领域,具体公开了一种反应堆压力容器外表面扫查装置,包括圆周弧形扫查轴、直线扫查轴和扫查结构,所述的圆周弧形扫查轴和直线扫查轴通过连接件正交连接,扫查结构安装在直线扫查轴上;圆周弧形扫查轴包括圆弧导轨、形齿条、固定架,周向驱动电机及周向驱动齿轮,直线扫查轴包括通过导轨座、旋转气缸A、气缸连接板和伸缩气缸。直线扫查轴通过连接件与圆周弧形扫查轴正交连接,实现压力容器外表面检查。圆周弧形扫查轴实现直线扫查轴沿圆弧导轨做圆周运动;通过选用多个旋转气缸,实现了托盘角度的调整及不同托盘或工具
一种全范围扫查的反应堆压力容器接管安全端扫查装置.pdf
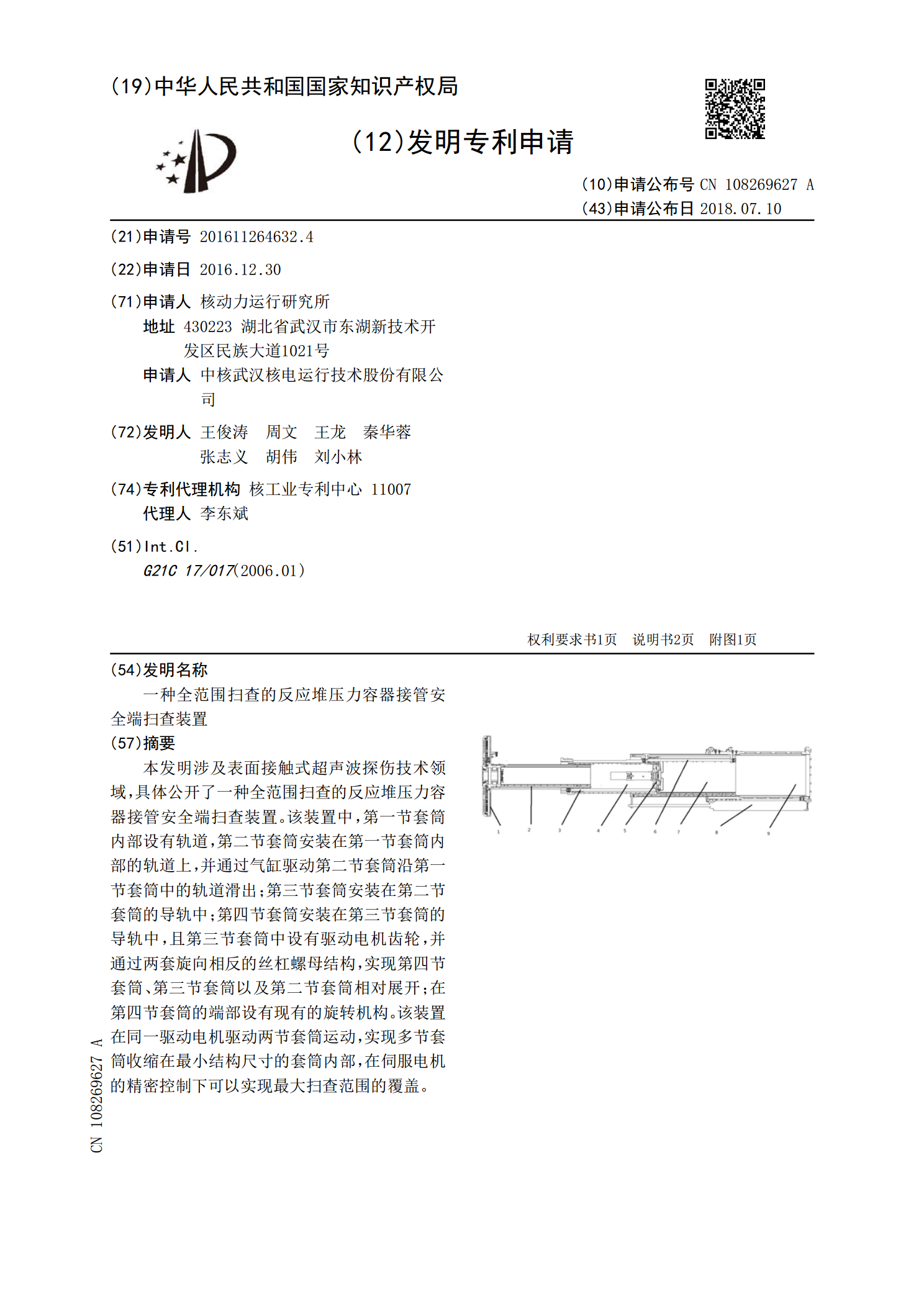
本发明涉及表面接触式超声波探伤技术领域,具体公开了一种全范围扫查的反应堆压力容器接管安全端扫查装置。该装置中,第一节套筒内部设有轨道,第二节套筒安装在第一节套筒内部的轨道上,并通过气缸驱动第二节套筒沿第一节套筒中的轨道滑出;第三节套筒安装在第二节套筒的导轨中;第四节套筒安装在第三节套筒的导轨中,且第三节套筒中设有驱动电机齿轮,并通过两套旋向相反的丝杠螺母结构,实现第四节套筒、第三节套筒以及第二节套筒相对展开;在第四节套筒的端部设有现有的旋转机构。该装置在同一驱动电机驱动两节套筒运动,实现多节套筒收缩在最小

压水式核反应堆的管状部件及制造所述部件的方法.pdf
本发明提供一种压水式核反应堆的管状部件,按重量计具有以下组成:0.8%≤Nb≤2.8%;痕量≤Sn≤0.65%;0.015%≤Fe≤0.40%;优选0.020%≤Fe≤0.35%;痕量≤C≤100ppm;600ppm≤O≤2300ppm;优选900ppm≤O≤1800ppm;5ppm≤S≤100ppm;优选8ppm≤S≤35ppm;痕量≤Cr+V+Mo+Cu≤0.35%;痕量≤Hf≤100ppm;F≤1ppm;余量为锆和制造杂质,并且具有在最终机械抛光后得到的粗糙度Ra不超过0.5μm的外表面,其特征在于

一种反应堆压力容器螺栓孔带超声扫查装置.pdf
本发明公开了一种反应堆压力容器螺栓孔带超声扫查装置,其包括:探头安装盘,倾斜设置于探头安装盘上的第一水浸式探头、多排错位排布形成菱形状且垂直安装盘端面设置的第二水浸式探头、安装于探头安装盘上用于对压力容器螺栓孔和第一水浸式探头以及第二水浸式探头状态进行实时监控的监控摄像头;径向步进组件;周向旋转组件。设备前端布置多排第二水浸式探头,扫查孔间联系时,只需径向步进三次,沿法兰表面圆周行走三圈即可完成全部扫查工作,大大节省了扫查时间。通过第一水浸式探头在与螺栓孔中心距离不同时结构信号不同的特点来寻找螺栓孔中心位