
基于多工况时域响应的PID水轮机调速器参数优化方法.pdf

文库****坚白


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多工况时域响应的PID水轮机调速器参数优化方法.pdf
本发明公开了一种基于多工况时域响应的PID水轮机调速器参数优化方法,包括以下步骤:(1)建立水轮机调节系统模型,具体包括:PID水轮机调速器模型,水轮机-引水管道模型和发电机模型;(2)通过现场试验和参数辨识的方式求得水轮机调节系统模型参数;(3)设计基于多工况时域响应的综合适应度函数,确定优化目标为:找到最优PID控制参数,使得综合适应度函数值达到最小;(4)利用智能优化算法求取最优控制参数。该方法求取的控制参数使得系统能够在不同的工况下都保持满意的动态特性,增强了系统鲁棒性。

基于频率响应的水轮机PID型调速器参数设计方法.pdf
本发明涉及基于频率响应的水轮机PID型调速器参数设计方法,该方法包括:建立含有系统主要发电机组的统一频率模型;选择调速器参数设计目标机组;扫频测量得到各个运行方式下统一频率系统的开环频率响应数据;求解各个运行方式下考虑系统稳定约束的参数解空间
一种水轮机调速器PID参数优化方法及系统.pdf
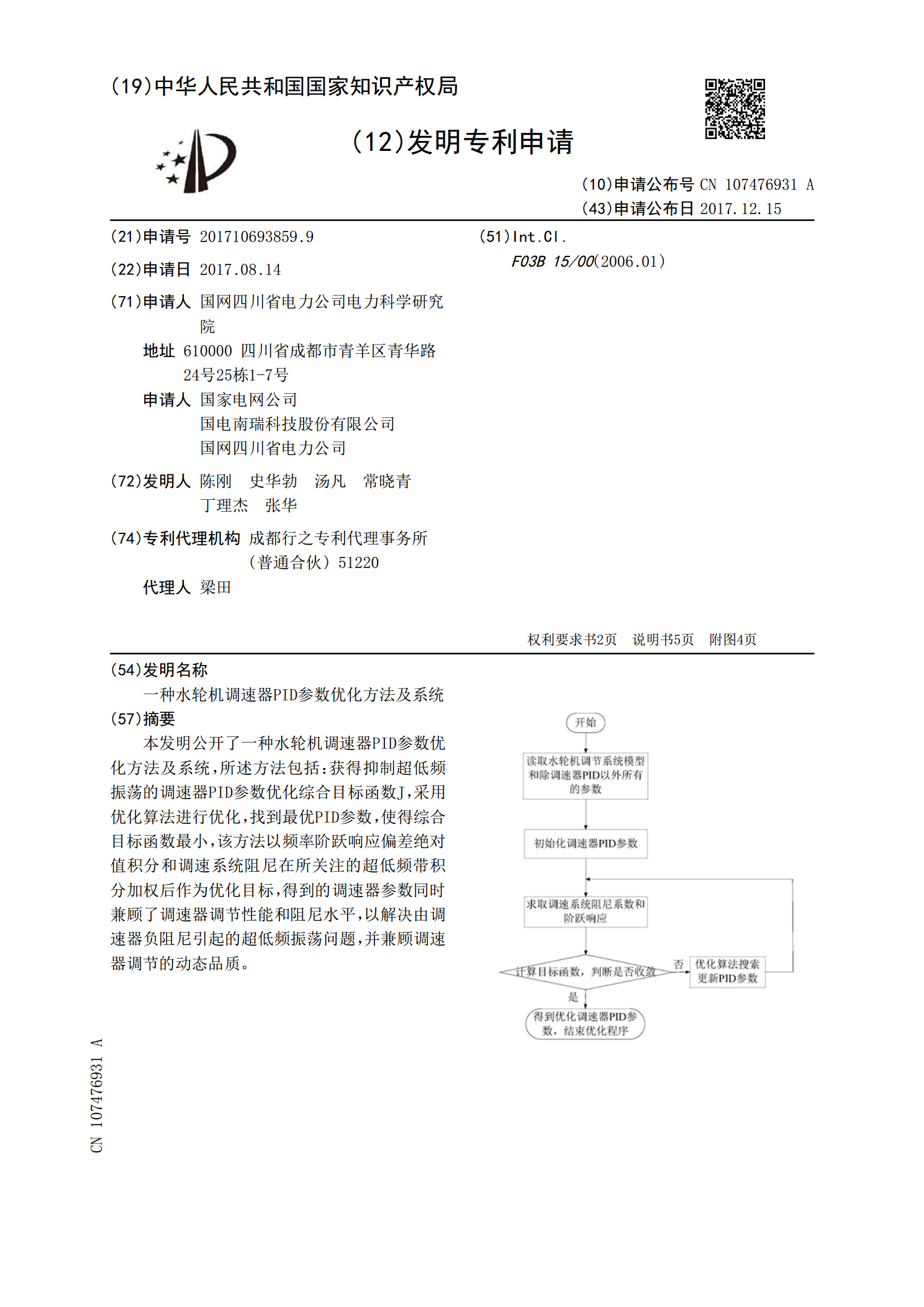
本发明公开了一种水轮机调速器PID参数优化方法及系统,所述方法包括:获得抑制超低频振荡的调速器PID参数优化综合目标函数J,采用优化算法进行优化,找到最优PID参数,使得综合目标函数最小,该方法以频率阶跃响应偏差绝对值积分和调速系统阻尼在所关注的超低频带积分加权后作为优化目标,得到的调速器参数同时兼顾了调速器调节性能和阻尼水平,以解决由调速器负阻尼引起的超低频振荡问题,并兼顾调速器调节的动态品质。

基于模糊自适应的DFPSO算法的水轮机调速器参数优化方法.pdf
本发明请求保护一种基于模糊自适应的DFPSO算法的水轮机调速器参数优化方法,包括步骤:(1)建立水轮机调节系统数学模型;(2)确定模糊自适应和差分进化粒子群算法的适应度函数;(3)对该算法的速度惯性因子进行模糊设置,具体是将线性递减的惯性因子和粒子当前最优性能评价指标作为模糊输入;(4)计算粒子的适应度值,保留粒子的个体最优值和全局最优值,并更新粒子的速度和位置;(5)若满足交叉条件,则在粒子间进行基因交叉;(6)判断是否满足终止条件,满足则停止并输出最优值,不满足则返回步骤4-6。本发明能确保系统在频率

混沌变异进化规划在水轮机调速器PID参数优化中的应用.pdf
’%9(!’!)’3=,%9!)3,!!!!!!!!!!%##!V9*%#b>?@,%#"%##!+:wxyz{|}~‘#![Qb!&4’sf"|*+jk=>?!,@A!&!B!*lG3$%[/P[;%,"*l-%###"##45!iv@j;-8kl/MmnCDopqrE=/Ostju5v(2ab!=wxY>‘yGzt<{|2n}d[*!nI#mDwxn}t<{|~!""~!#$#ID2F%(M&2’8jj[n}2()!lF!’82*(M~!@Npn}d[!&|vjkCD2+,!"d!‘{|j[.FAtj