
一种水轮机调速器PID参数优化方法及系统.pdf

佳宁****么啦


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水轮机调速器PID参数优化方法及系统.pdf
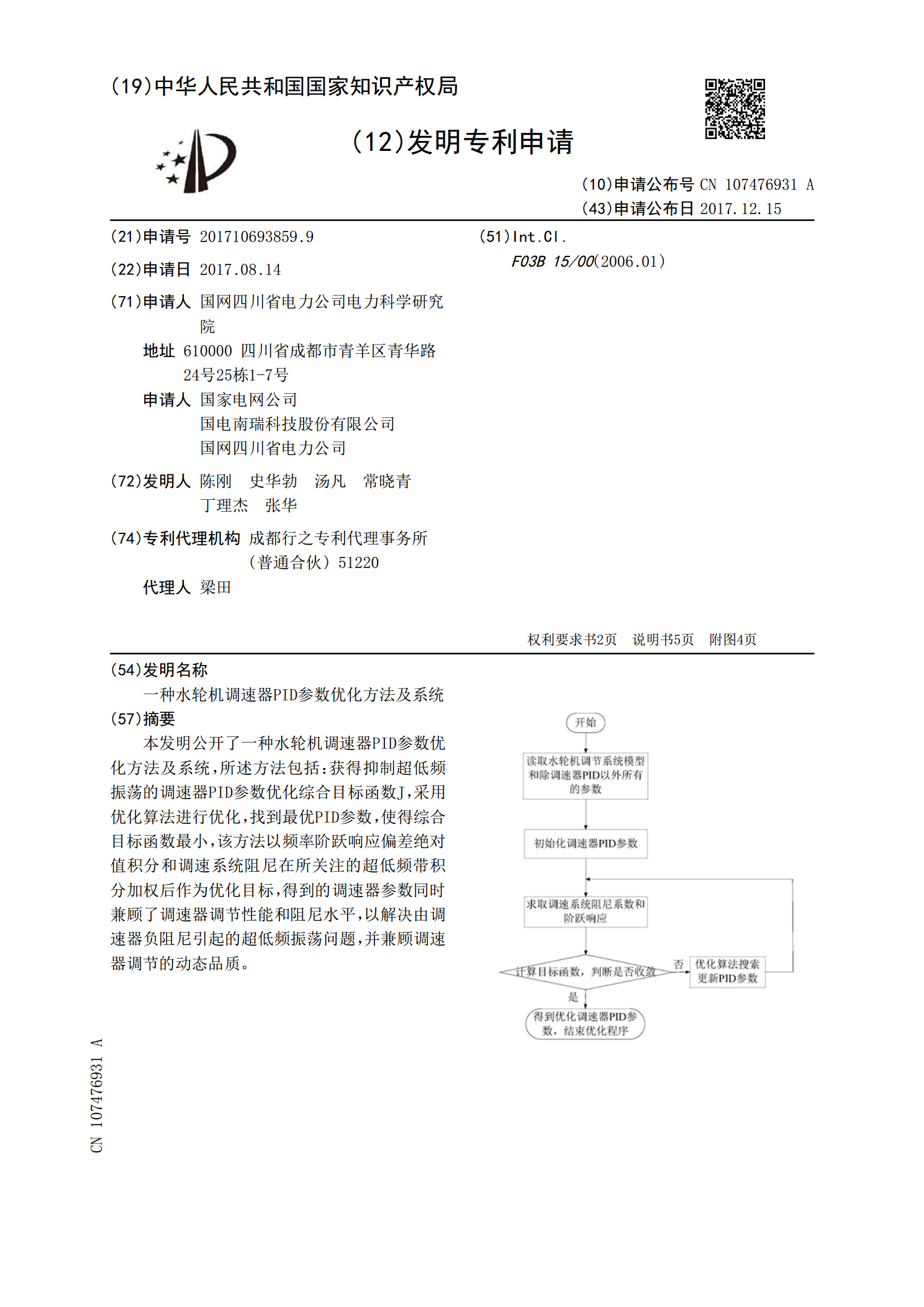
本发明公开了一种水轮机调速器PID参数优化方法及系统,所述方法包括:获得抑制超低频振荡的调速器PID参数优化综合目标函数J,采用优化算法进行优化,找到最优PID参数,使得综合目标函数最小,该方法以频率阶跃响应偏差绝对值积分和调速系统阻尼在所关注的超低频带积分加权后作为优化目标,得到的调速器参数同时兼顾了调速器调节性能和阻尼水平,以解决由调速器负阻尼引起的超低频振荡问题,并兼顾调速器调节的动态品质。

基于多工况时域响应的PID水轮机调速器参数优化方法.pdf
本发明公开了一种基于多工况时域响应的PID水轮机调速器参数优化方法,包括以下步骤:(1)建立水轮机调节系统模型,具体包括:PID水轮机调速器模型,水轮机-引水管道模型和发电机模型;(2)通过现场试验和参数辨识的方式求得水轮机调节系统模型参数;(3)设计基于多工况时域响应的综合适应度函数,确定优化目标为:找到最优PID控制参数,使得综合适应度函数值达到最小;(4)利用智能优化算法求取最优控制参数。该方法求取的控制参数使得系统能够在不同的工况下都保持满意的动态特性,增强了系统鲁棒性。

一种水轮机组调速器PID参数切换方法及装置.pdf
本发明公开了一种水轮机组调速器PID参数切换方法及装置,包括:采用预设的PID参数整定算法对所有水轮机组调速器的PID参数进行优化整定,得到第一PID参数和第二PID参数;按照水轮机组调速器出现振荡发生时对应的有功功率振幅对所述水轮机组调速器进行分组,并确定各组水轮机组调速器的PID参数运行模式;根据各组水轮机组调速器的PID参数运行模式,分别构建水轮机组调速器的PID参数模糊切换模型;将实时获取的实时频率偏差值输入到PID参数模糊切换模型,并根据PID参数模糊切换模型的输出结果切换水轮机组调速器的PID
一种风电参与调频的PID调速器参数优化方法.pdf
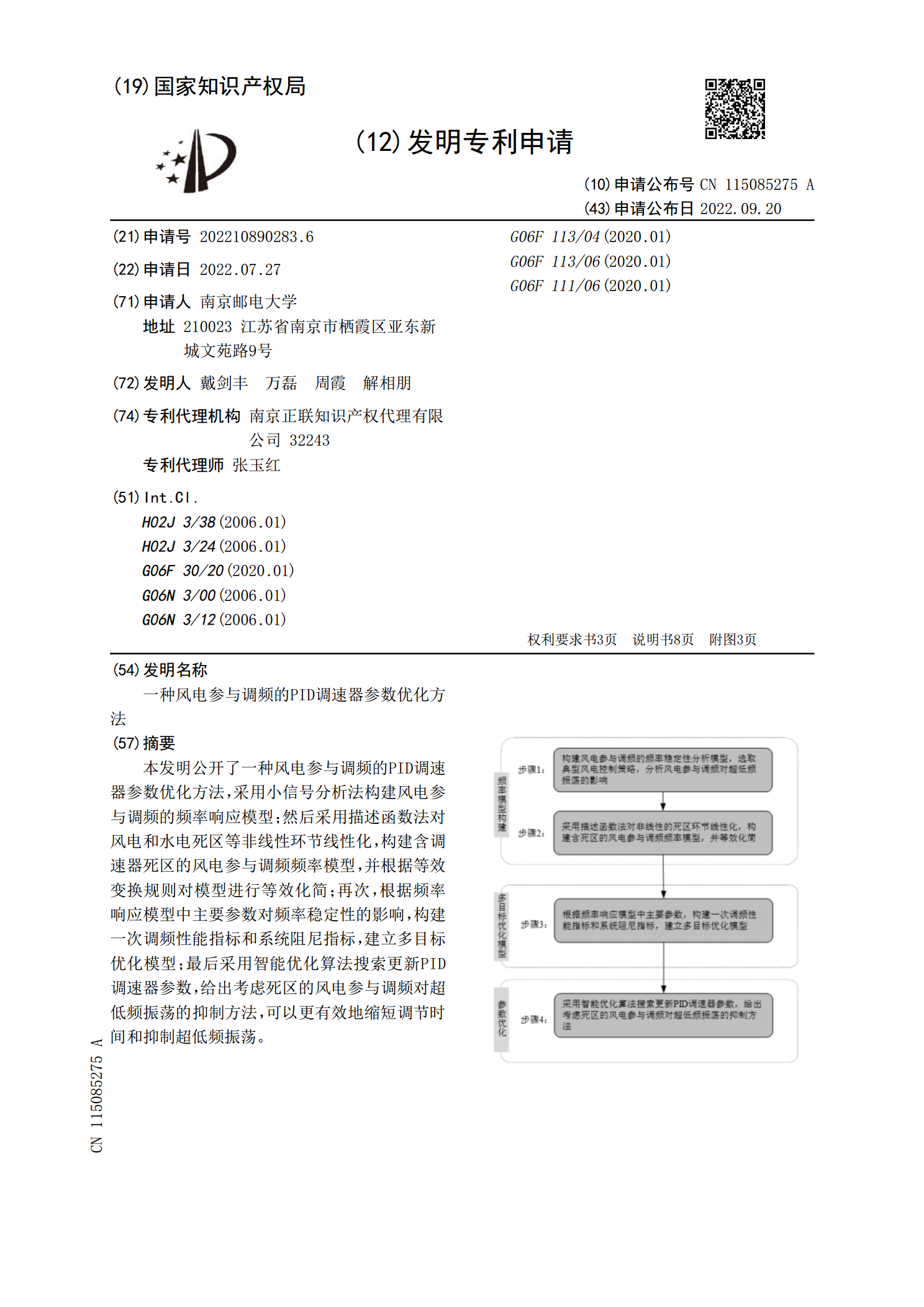
本发明公开了一种风电参与调频的PID调速器参数优化方法,采用小信号分析法构建风电参与调频的频率响应模型;然后采用描述函数法对风电和水电死区等非线性环节线性化,构建含调速器死区的风电参与调频频率模型,并根据等效变换规则对模型进行等效化简;再次,根据频率响应模型中主要参数对频率稳定性的影响,构建一次调频性能指标和系统阻尼指标,建立多目标优化模型;最后采用智能优化算法搜索更新PID调速器参数,给出考虑死区的风电参与调频对超低频振荡的抑制方法,可以更有效地缩短调节时间和抑制超低频振荡。

一种基于改进遗传算法的水轮机调节系统PID参数优化方法.pdf
本发明公开了一种基于改进遗传算法的水轮机调节系统PID参数优化方法,包括:根据水轮机的参数建立水轮机调节系统非线性模型,并搭建仿真平台;定义目标优化函数;利用自适应萤火虫遗传算法优化所述水轮机调节系统非线性模型的PID参数,以获得所述目标优化函数最优解;本发明能够明显提高调水轮机调节系统PID参数全局搜索最优解的能力和寻优效率,提升机组负荷调节过渡过程性能,对机组的稳定运行及改善调节品质起到了很好的作用。