
面向血型分析仪的自动加样机械臂控制系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向血型分析仪的自动加样机械臂控制系统设计.docx
面向血型分析仪的自动加样机械臂控制系统设计面向血型分析仪的自动加样机械臂控制系统设计摘要:随着医疗技术的发展,自动化设备在医疗领域的应用日益普及。面向血型分析仪的自动加样机械臂控制系统设计是提高血型分析仪的自动化程度和工作效率的重要途径之一。本文首先对血型分析仪的自动加样机械臂控制系统的功能需求进行了分析,其次介绍了机械臂控制系统的硬件组成和工作原理,然后详细探讨了控制系统的设计过程,包括运动规划、轨迹控制和反馈控制等关键技术。最后通过实验验证了该控制系统的稳定性和可行性。本文的研究成果对于提高血型分析仪
抓取机械臂及血型分析仪设备.pdf
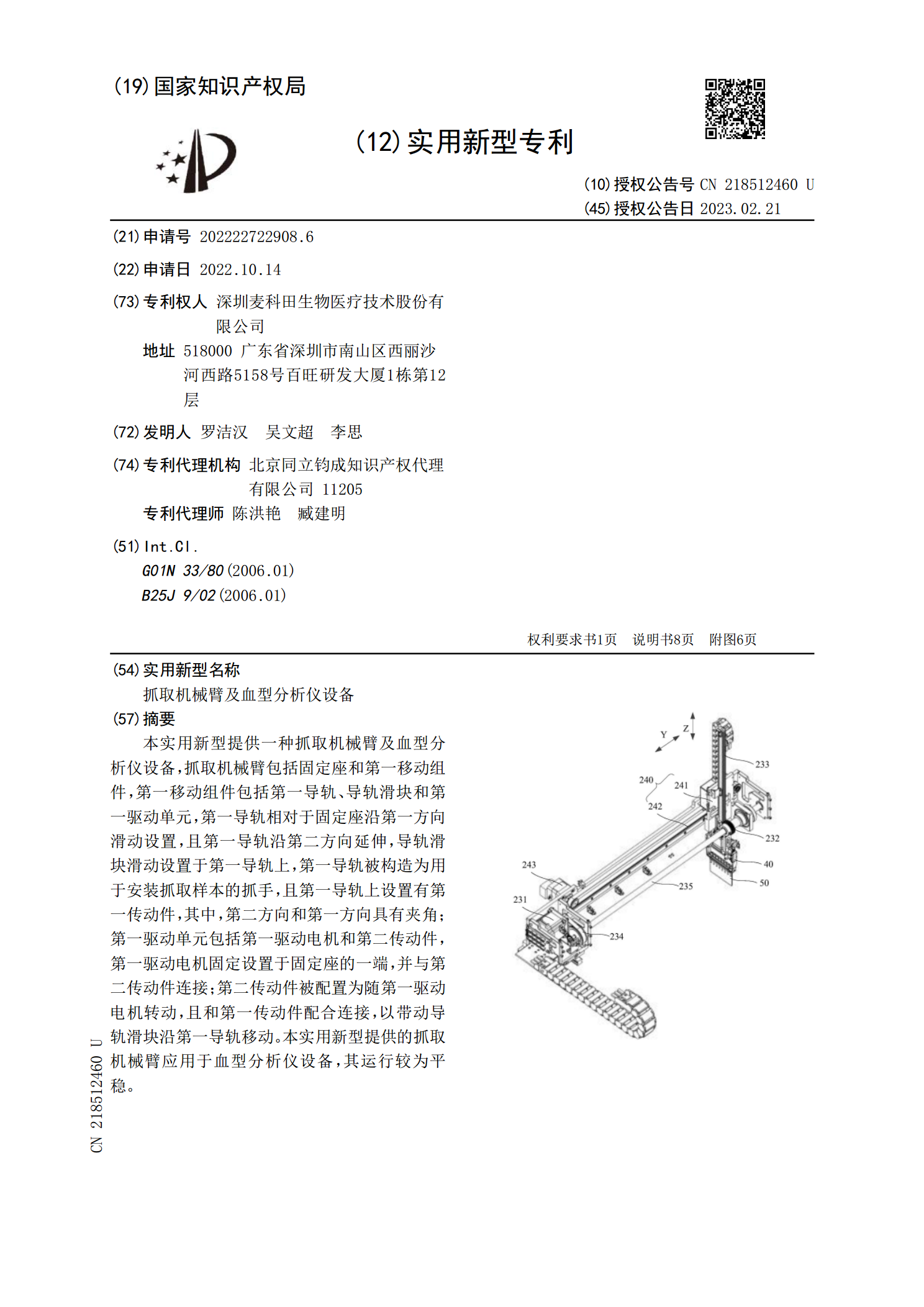
本实用新型提供一种抓取机械臂及血型分析仪设备,抓取机械臂包括固定座和第一移动组件,第一移动组件包括第一导轨、导轨滑块和第一驱动单元,第一导轨相对于固定座沿第一方向滑动设置,且第一导轨沿第二方向延伸,导轨滑块滑动设置于第一导轨上,第一导轨被构造为用于安装抓取样本的抓手,且第一导轨上设置有第一传动件,其中,第二方向和第一方向具有夹角;第一驱动单元包括第一驱动电机和第二传动件,第一驱动电机固定设置于固定座的一端,并与第二传动件连接;第二传动件被配置为随第一驱动电机转动,且和第一传动件配合连接,以带动导轨滑块沿第

一种分析仪用加样装置及全自动血型分析仪.pdf
一种分析仪用加样装置,包括加样底座,在加样底座上设有可沿加样底座滑动的转台,所述转台包括转台底板和转台顶板,转台底板和转台顶板通过竖直的立板连接,所述转台底板上和转台顶板上设有轴承孔,所述轴承孔内安装有加样轴承,所述加样轴承过盈配合连接着加样转轴,在加样转轴上装有可沿加样转轴上下移动的滑座,滑座连接着泵进样装置。该加样装置的结构简单,体积小,成本低,取样加样灵活移动。一种全自动血型分析仪,包括工作台,在工作台上安装有加样装置。该血型分析仪的结构简化,体积减小,成本降低,在操作中。加样装置和加试剂装置的操作
全自动血型仪器加样装置.pdf
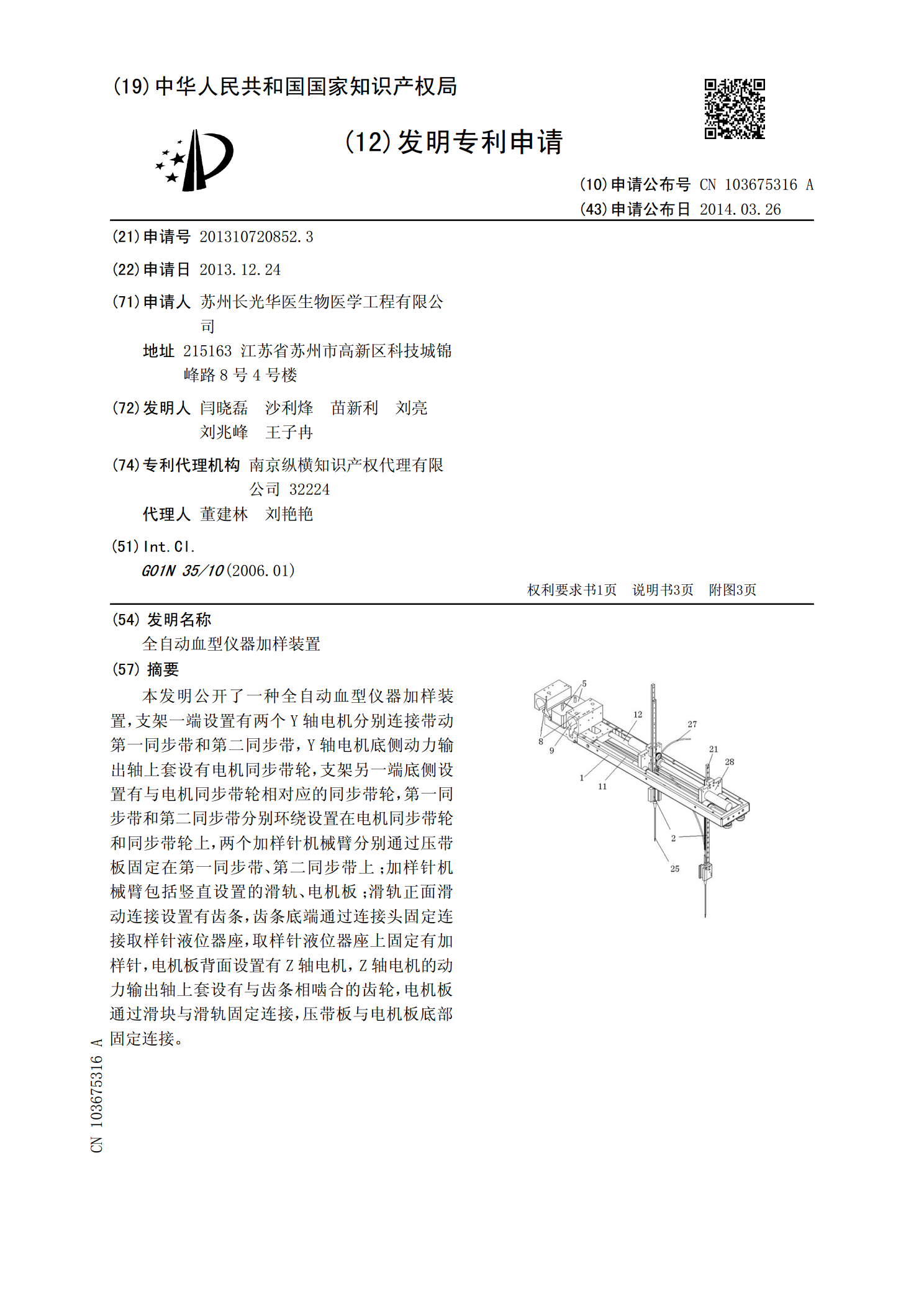
本发明公开了一种全自动血型仪器加样装置,支架一端设置有两个Y轴电机分别连接带动第一同步带和第二同步带,Y轴电机底侧动力输出轴上套设有电机同步带轮,支架另一端底侧设置有与电机同步带轮相对应的同步带轮,第一同步带和第二同步带分别环绕设置在电机同步带轮和同步带轮上,两个加样针机械臂分别通过压带板固定在第一同步带、第二同步带上;加样针机械臂包括竖直设置的滑轨、电机板;滑轨正面滑动连接设置有齿条,齿条底端通过连接头固定连接取样针液位器座,取样针液位器座上固定有加样针,电机板背面设置有Z轴电机,Z轴电机的动力输出轴上

基于Arduino的自动分拣机械臂控制系统设计.pptx
基于Arduino的自动分拣机械臂控制系统设计目录添加章节标题系统概述设计背景系统功能关键技术硬件设计Arduino控制器机械臂结构传感器与执行器电源与接口软件设计控制算法运动学建模通信协议调试与优化系统测试与验证测试环境搭建测试方案与流程测试结果分析系统性能评估应用场景与优势分析物流分拣系统自动化生产线安全防护与监控成本效益分析未来展望与改进空间技术发展趋势系统升级与扩展潜在应用领域技术挑战与展望THANKYOU