
车载LiDAR点云数据分割与半自动化建模方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车载LiDAR点云数据分割与半自动化建模方法.docx
车载LiDAR点云数据分割与半自动化建模方法车载LiDAR点云数据分割与半自动化建模方法摘要:随着科学技术的持续发展,三维建模技术也得到了广泛应用。其中,车载LiDAR技术以其高精度、高效率等特点,受到了越来越多的关注。然而,由于车载LiDAR采集的点云数据量大,处理难度大,因此点云数据的分割和半自动化建模成为了研究的热点。本文主要介绍了车载LiDAR点云数据分割的方法和半自动化建模方法,包括点云特征提取、点云分割和模型生成等。为了更好地验证这些方法,本文利用实际采集的车载LiDAR点云数据进行了实验,并

LiDAR点云数据分割方法的比较分析.docx
LiDAR点云数据分割方法的比较分析一、引言LiDAR(LightDetectionandRanging)技术是通过激光扫描获取物体表面精细的三维点云数据,具有高精度、高密度、高分辨率等优点,被广泛应用于地形测绘、建筑物三维建模、城市规划、自动驾驶等领域。然而,对于大规模点云数据的处理和分析,尤其是需要对点云数据进行语义分割时,由于其数据量大、存在高度的噪声等特点,如何实现高效、准确并且可扩展的点云语义分割仍然是一个挑战。本文将对常见的LiDAR点云数据分割方法进行比较分析。二、LiDAR点云数据分割方法

基于分割的机载LiDAR点云数据滤波获取DTM方法研究.docx
基于分割的机载LiDAR点云数据滤波获取DTM方法研究标题:基于分割的机载LiDAR点云数据滤波获取DTM方法研究摘要:机载LiDAR点云数据在数字地形模型(DTM)生成中起着至关重要的作用。然而,由于点云数据中存在噪声和离散点,传统的DTM生成方法存在困难,导致DTM的精度和准确性不可避免地受到影响。本文提出了一种基于分割的机载LiDAR点云数据滤波获取DTM的方法,该方法通过对点云数据进行分割和滤波,有效地提高了DTM的生成精度和准确性。通过与传统方法的实验对比,验证了该方法在DTM生成中的优越性。关
基于车载Lidar点云的行人识别方法.pdf
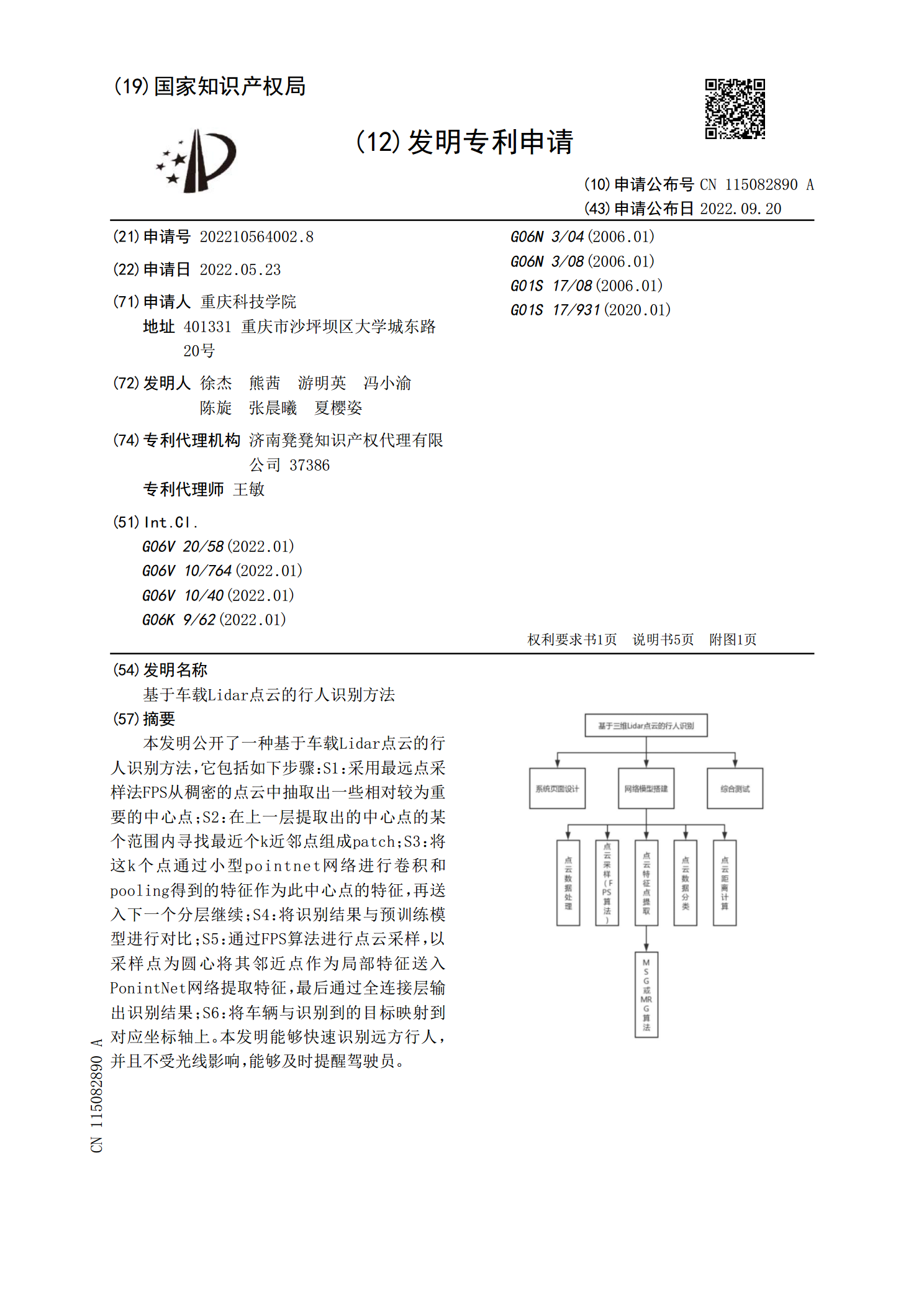
本发明公开了一种基于车载Lidar点云的行人识别方法,它包括如下步骤:S1:采用最远点采样法FPS从稠密的点云中抽取出一些相对较为重要的中心点;S2:在上一层提取出的中心点的某个范围内寻找最近个k近邻点组成patch;S3:将这k个点通过小型pointnet网络进行卷积和pooling得到的特征作为此中心点的特征,再送入下一个分层继续;S4:将识别结果与预训练模型进行对比;S5:通过FPS算法进行点云采样,以采样点为圆心将其邻近点作为局部特征送入PonintNet网络提取特征,最后通过全连接层输出识别结果

LiDAR点云数据分割的自适应回波比率算法研究.docx
LiDAR点云数据分割的自适应回波比率算法研究标题:LiDAR点云数据分割的自适应回波比率算法研究摘要:激光雷达(LiDAR)技术在地理信息、自动驾驶和机器人等领域被广泛应用。点云数据分割是LiDAR数据处理的重要任务之一。本论文针对现有的点云数据分割算法在处理复杂环境时面临的挑战,提出了一种基于自适应回波比率的分割算法。首先,分析了LiDAR点云数据的特点和应用场景,并探讨了现有算法的局限性。然后,提出了自适应回波比率算法的关键思想和流程,并详细介绍了算法的实现过程。最后,通过实验验证了算法的有效性和准