
一种具有柔性腰部的灵巧型四足机器人.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有柔性腰部的灵巧型四足机器人.pdf
本发明公开一种具有柔性腰部的灵巧型四足机器人,包括前后车身、腰部机构、胯部机构以及腿部机构。前后车身间通过分体式虎克铰相连,实现相对偏转、俯仰。前后车身均安装两套胯部机构,使胯部机构输出轴朝向车身外侧,安装腿部机构;输出轴与传动轴间锥齿轮啮合传动,实现输出轴的转动驱动。胯部机构上固定有定轴;通过驱动定轴转动使齿轮箱;由此实现腿部机构的前后、上下摆动。腿部机构具有大腿部分与小腿部分,之间由膝关节结构相连;膝关节通过两个锥齿轮传动,使小腿部分相对大腿部分前后摆动。本发明的优点为:能够提高山地环境的通行能力,减

一种具有柔性腰部和弹性腿的柔顺四足机器人.pdf
本发明涉及一种四足步行机器人,具体涉及一种具有柔性腰部和弹性腿的柔顺四足机器人。分为前躯干、脊柱、腰部、后躯干以及四条结构相同的腿几部分;前躯干或后躯干中的轴承与各条腿上的法兰轴构成转动副,前躯干与脊柱用转动副连接,由电机和齿轮组驱动,使机器人身体具有俯仰的自由度,脊柱与腰部用带有扭簧的转动副连接,使机器人身体具有横滚自由度,腰部和后躯干也用带有扭簧的转动副连接,使机器人身体具有偏转自由度,机器人腿部由大腿,小腿构成,都由电机和齿轮组驱动,小腿装有压簧,使机器人行走时地面冲击力减小。该发明采用柔性机构替代
一种具有柔性腰的四足行走机器人.pdf
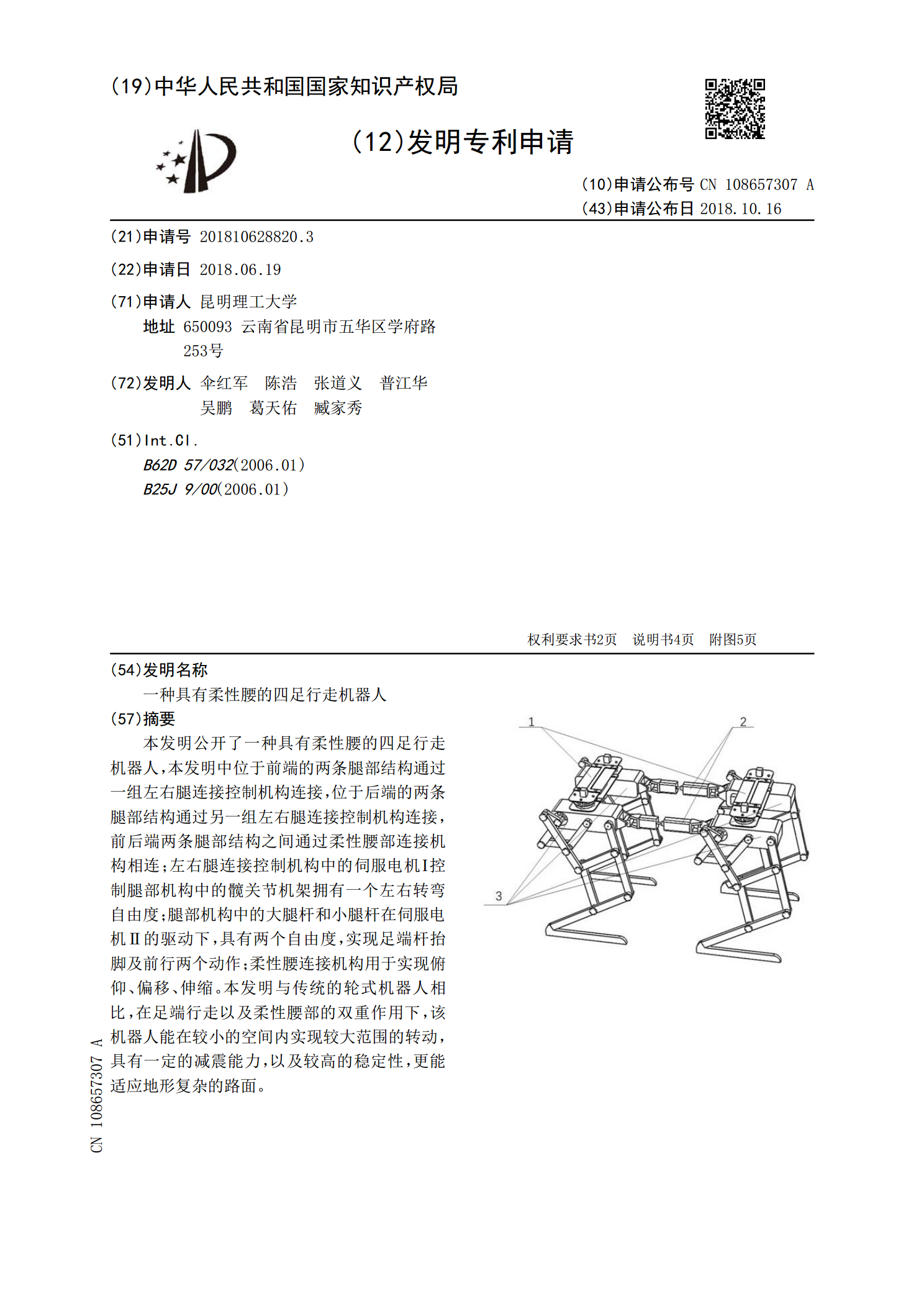
本发明公开了一种具有柔性腰的四足行走机器人,本发明中位于前端的两条腿部结构通过一组左右腿连接控制机构连接,位于后端的两条腿部结构通过另一组左右腿连接控制机构连接,前后端两条腿部结构之间通过柔性腰部连接机构相连;左右腿连接控制机构中的伺服电机Ⅰ控制腿部机构中的髋关节机架拥有一个左右转弯自由度;腿部机构中的大腿杆和小腿杆在伺服电机Ⅱ的驱动下,具有两个自由度,实现足端杆抬脚及前行两个动作;柔性腰连接机构用于实现俯仰、偏移、伸缩。本发明与传统的轮式机器人相比,在足端行走以及柔性腰部的双重作用下,该机器人能在较小的

具有柔性脊椎的四足机器人奔跑分析.docx
具有柔性脊椎的四足机器人奔跑分析具有柔性脊椎的四足机器人奔跑分析引言:近年来,机器人技术的发展取得了重大突破,具有柔性脊椎的四足机器人成为了研究的热点。对于机器人而言,奔跑是一项重要的技能,因为奔跑能够提供机器人高速、灵活的移动能力。而具有柔性脊椎的四足机器人在奔跑过程中表现出与真实动物更加相似的动作和灵活性,这对于机器人的应用具有重要意义。本论文将对具有柔性脊椎的四足机器人奔跑进行详细分析和探讨。一、柔性脊椎技术的介绍:柔性脊椎技术是指在机器人的脊椎部分采用柔性材料和结构,使机器人在运动过程中能够更好地

一种具有柔性踝关节的双足机器人.pdf
一种具有柔性踝关节的双足机器人,它涉及一种双足机器人,以解决现有双足机器人对地面适应性差,以及能量损失较大,能力效率较低的问题,它包括左腿、右腿和骨盆;左腿和右腿分别包括大腿、小腿、足部、髋关节、膝关节和踝关节;左腿和右腿通过骨盆连接,每个所述髋关节包括髋关节电机、一号髋关节链轮、二号髋关节链轮、髋关节链条和髋关节传动轴;每个所述膝关节包括膝关节电机、一号膝关节链轮、二号膝关节链轮、膝关节链条、膝关节传动轴、小腿连接座和两个大腿轴承座;所述连接架固定连接在所述足部连接座上,所述足部连接座安装在所述脚跟上,