
具有柔性脊椎的四足机器人奔跑分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有柔性脊椎的四足机器人奔跑分析.docx
具有柔性脊椎的四足机器人奔跑分析具有柔性脊椎的四足机器人奔跑分析引言:近年来,机器人技术的发展取得了重大突破,具有柔性脊椎的四足机器人成为了研究的热点。对于机器人而言,奔跑是一项重要的技能,因为奔跑能够提供机器人高速、灵活的移动能力。而具有柔性脊椎的四足机器人在奔跑过程中表现出与真实动物更加相似的动作和灵活性,这对于机器人的应用具有重要意义。本论文将对具有柔性脊椎的四足机器人奔跑进行详细分析和探讨。一、柔性脊椎技术的介绍:柔性脊椎技术是指在机器人的脊椎部分采用柔性材料和结构,使机器人在运动过程中能够更好地

具有柔性脊椎的四足机器人奔跑运动分析.docx
具有柔性脊椎的四足机器人奔跑运动分析人类对四足机器人的研究始于20世纪70年代,当时人们希望用机器人替代人类从事某些危险、高风险的工作。如今,随着科技的进步,四足机器人被广泛应用于探索宇宙、搜索救援、战争等领域。其中,具有柔性脊椎的四足机器人在奔跑运动中发挥了重要作用。本文将就该主题作一分析。一、柔性脊椎对四足机器人奔跑的影响柔性脊椎是指四足机器人的运动柔软性器官,其可以帮助机器人实现从均衡到动态的转化,减少能量损失,提高机器人的运动效率。具有柔性脊椎的四足机器人在奔跑时,会根据不同的环境变化和瞬时需求,

具有柔性脊椎的四足机器人奔跑分析的开题报告.docx
具有柔性脊椎的四足机器人奔跑分析的开题报告一、研究目的四足机器人具有很多潜在应用,如探测不适合人类进入的地下及海底环境、进行人道不可行的任务、承担物流系统中的货物运输等。当前,四足机器人的研究中出现了一个很有挑战性的问题,即如何实现机器人的高速、高效运动,以达到顺畅地通过复杂且不可预计的地形的要求,这也正是我们研究的目的。二、研究内容我们的研究主要是针对柔性脊椎四足机器人的奔跑问题展开的,具体研究内容如下:1、设计并制作柔性脊椎四足机器人根据机器人运动学原理和动力学原理进行计算,设计出机器人的脊柱结构,同

具有柔性脊椎的四足机器人坡面及奔跑运动分析的任务书.docx
具有柔性脊椎的四足机器人坡面及奔跑运动分析的任务书任务书:具有柔性脊椎的四足机器人坡面及奔跑运动分析1.任务背景目前机器人技术已经发展到了一个新的层面,越来越多的机器人具有较高的智能化和适应性。四足机器人是这一领域中的一个重要方向,它在军事、工业、医疗等领域都有广泛的应用。然而,传统的四足机器人存在着某些不足,例如在坡面和奔跑等方面的适应性能力不足。为解决这一问题,最新的研究表明,具有柔性脊椎的四足机器人可以更好地适应坡面和奔跑等特殊环境。因此,本次任务旨在设计一款具有柔性脊椎的四足机器人,并分析其在坡面
一种具有柔性腰的四足行走机器人.pdf
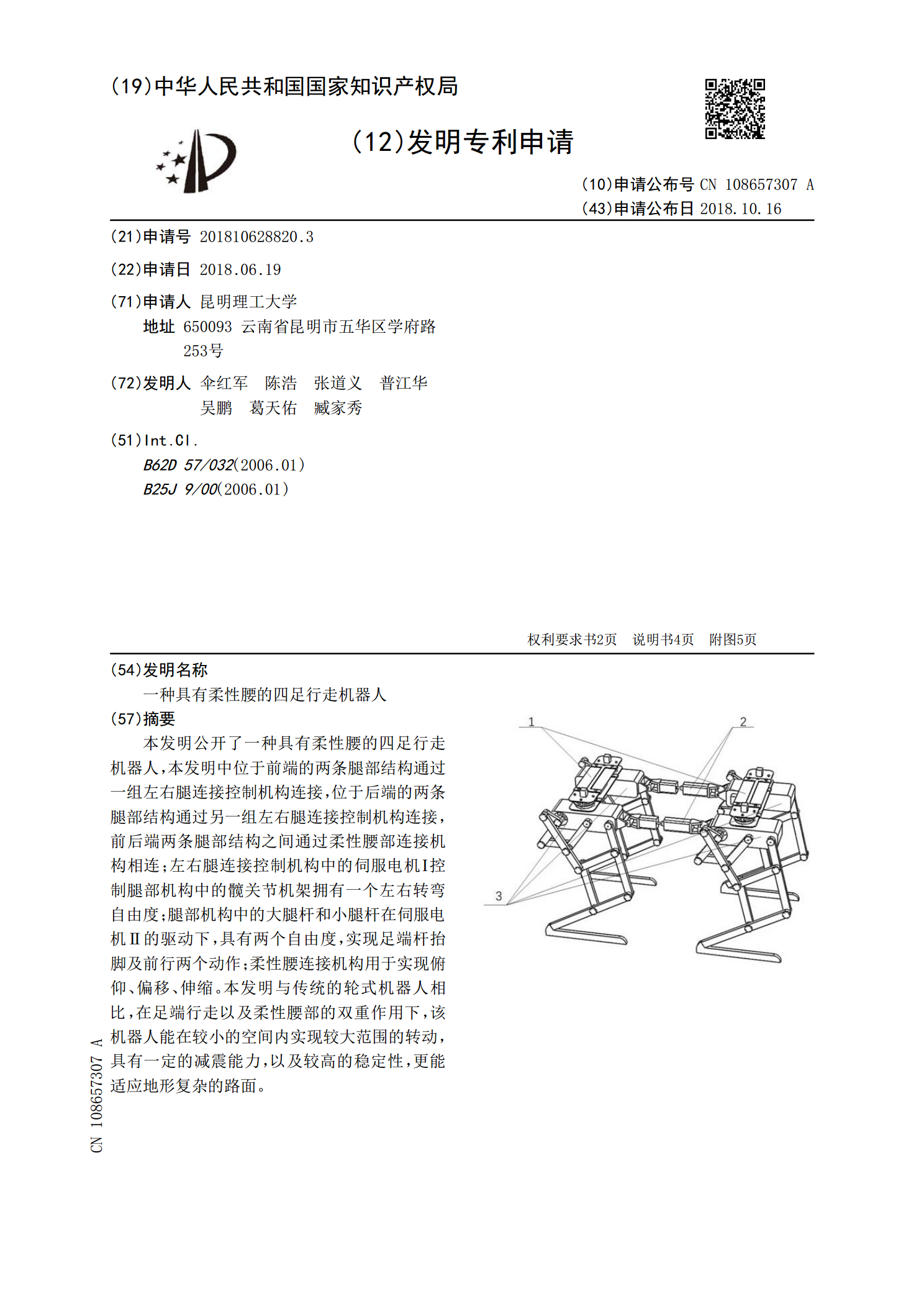
本发明公开了一种具有柔性腰的四足行走机器人,本发明中位于前端的两条腿部结构通过一组左右腿连接控制机构连接,位于后端的两条腿部结构通过另一组左右腿连接控制机构连接,前后端两条腿部结构之间通过柔性腰部连接机构相连;左右腿连接控制机构中的伺服电机Ⅰ控制腿部机构中的髋关节机架拥有一个左右转弯自由度;腿部机构中的大腿杆和小腿杆在伺服电机Ⅱ的驱动下,具有两个自由度,实现足端杆抬脚及前行两个动作;柔性腰连接机构用于实现俯仰、偏移、伸缩。本发明与传统的轮式机器人相比,在足端行走以及柔性腰部的双重作用下,该机器人能在较小的