
航空发动机试车台推力加载/校准系统及自动控制方法.pdf

努力****南绿


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

航空发动机试车台推力加载/校准系统及自动控制方法.pdf
本发明为航空发动机试车台推力加载/校准系统及自动控制方法,适用于航空发动机试车台的台架加载及校准技术,所述系统由上位机1,交换机2,伺服控制器3,比例压力溢流阀4,换向阀5,加载器6,力校准传感器7,力工作传感器8,动架9、液压站10组成;本发明可以达到设计要求,加载的稳定性、效率以及推力测量、校准的精度较以往均有较大的提升,并可推广应用于高空台推力加载、校准和测量中。

一种小型航空发动机试车台架推力校准系统.pdf
本发明涉及小型航空发动机高空模拟试验,特别涉及一种小型航空发动机试车台架推力校准系统。所述的系统包括台架、传感器和力加载系统,台架上分别安装工作传感器和校准传感器,其特征为:所述的力加载系统包括气源、稳压罐和气缸,气源通过稳压罐与气缸连通,气缸的一端连接台架。采用气压加载装置做为推力预加载,真空度对发动机推力测量的影响可以忽略不计,涡喷、涡扇发动机高空模拟试验推力修正项中高空舱真空度作用力可以忽略。

航空发动机试车台推力仿真技术研究.docx
航空发动机试车台推力仿真技术研究航空发动机试车台推力仿真技术研究摘要:航空发动机试车台推力仿真技术是航空发动机研发过程中的重要环节,它能够模拟发动机在飞行状态下的工作情况,对发动机的性能进行评估和验证。本文对航空发动机试车台推力仿真技术进行了研究,包括仿真原理、仿真方法和当前存在的问题,并提出了改进和优化的措施。1.引言航空发动机的研发和测试是航空工程领域的重要课题。在发动机的研发过程中,试车台推力仿真技术是不可或缺的一环。它能够模拟发动机在飞行状态下的工作情况,对发动机的性能进行评估和验证。目前,随着航

航空发动机室内试车台推力测量及其溯源体系分析.docx
航空发动机室内试车台推力测量及其溯源体系分析摘要:航空发动机室内试车台推力测量及其溯源体系分析是航空研究领域中的重要内容,本篇论文以此为题,通过对试车台推力测量的原理、方法及其溯源体系进行分析,了解试车台推力测量的应用情况及其发展趋势,对于提高航空产品的性能和质量具有重要意义。关键词:航空发动机、室内试车台、推力测量、溯源体系一、引言航空发动机的研制和验证需要进行大量的试验,而室内试车台是进行试验的主要工具之一,通过试车台对发动机的性能和质量等指标进行测量和分析,能够为发动机的优化设计和性能改进提供重要的
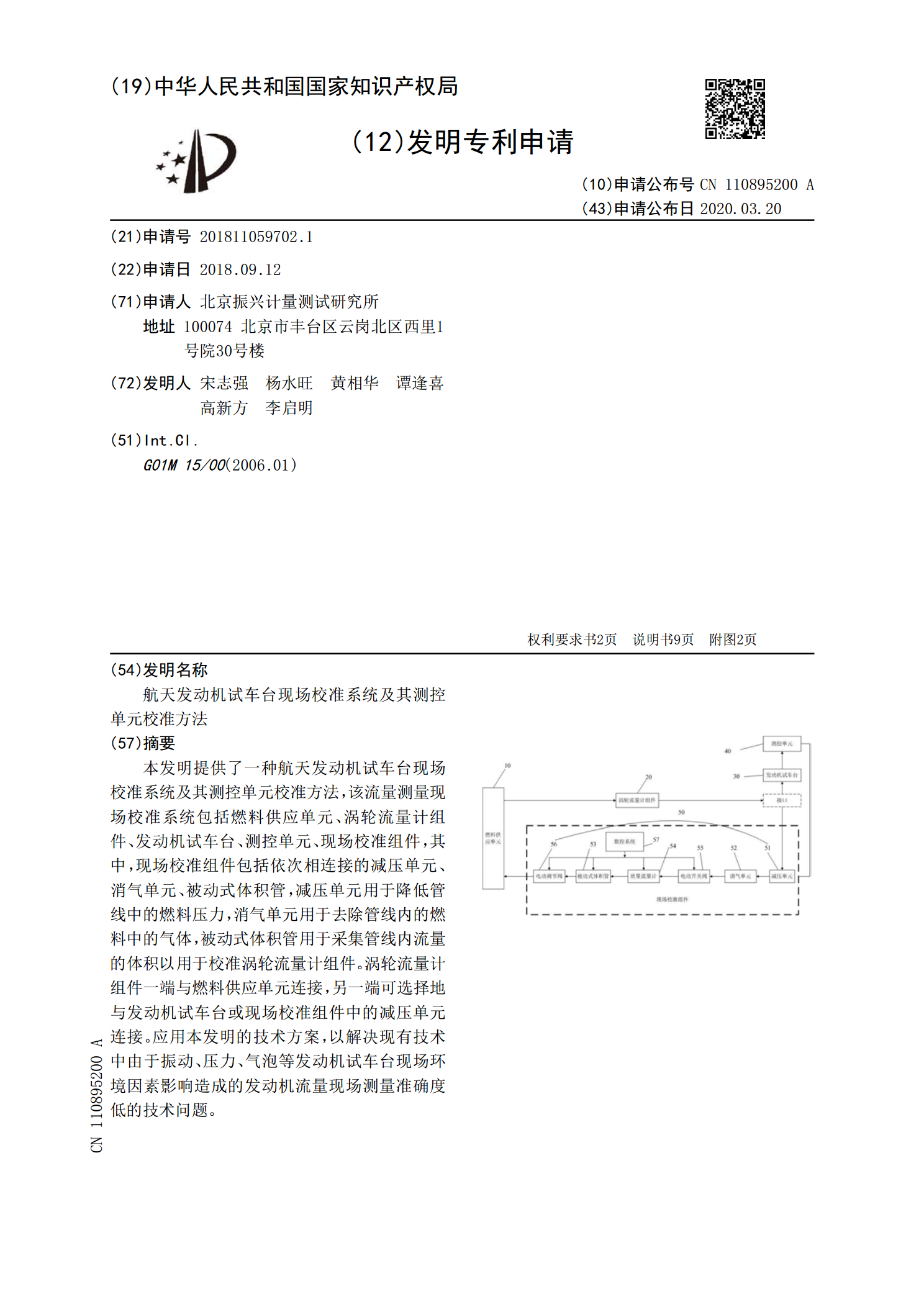
航天发动机试车台现场校准系统及其测控单元校准方法.pdf
本发明提供了一种航天发动机试车台现场校准系统及其测控单元校准方法,该流量测量现场校准系统包括燃料供应单元、涡轮流量计组件、发动机试车台、测控单元、现场校准组件,其中,现场校准组件包括依次相连接的减压单元、消气单元、被动式体积管,减压单元用于降低管线中的燃料压力,消气单元用于去除管线内的燃料中的气体,被动式体积管用于采集管线内流量的体积以用于校准涡轮流量计组件。涡轮流量计组件一端与燃料供应单元连接,另一端可选择地与发动机试车台或现场校准组件中的减压单元连接。应用本发明的技术方案,以解决现有技术中由于振动、压