
改进PID算法在光电跟踪仪中的应用研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

改进PID算法在光电跟踪仪中的应用研究.docx
改进PID算法在光电跟踪仪中的应用研究改进PID算法在光电跟踪仪中的应用研究摘要:光电跟踪仪(optical-electrictracker)作为一种常见的自动跟踪系统,广泛应用于工业生产线、无人机、火力控制等领域。PID(Proportional-Integral-Derivative)算法作为常用的控制算法之一,能够通过对系统的偏差、偏差积分以及偏差变化率的综合评估,实现对系统的精确控制。然而,传统的PID算法在光电跟踪仪应用中存在一些问题,如超调、震荡等。因此,本文基于PID算法提出了一种改进算法,

PID算法及标准PID算法的改进.docx
PID算法及标准PID算法的改进摘要PID控制器具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是迄今为止最稳定的控制方法。它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。从实际需要出发,一种好的PID控制器参数整定方法,不仅可以减少操作人员的负担,还可以使系统处于最佳运行状态。因此,对PID控制器参数整定法的研究具有重要的实际意义。本文介绍了PID控制技术的发展历史和研究进展。分析了传统的模拟和数字PID控制算法,并对传统的PID控制算法进行微分项
温控系统中改进的PID 算法.pdf
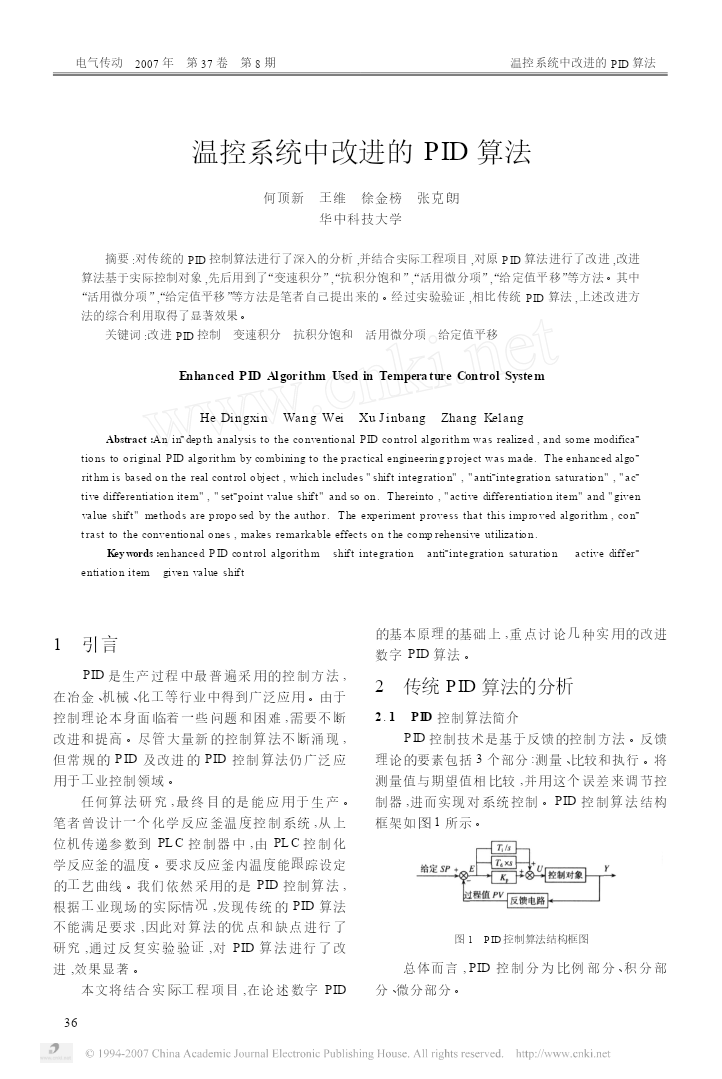
电气传动2007年第37卷第8期温控系统中改进的PID算法温控系统中改进的PID算法何顶新王维徐金榜张克朗华中科技大学摘要:对传统的PID控制算法进行了深入的分析,并结合实际工程项目,对原PID算法进行了改进,改进算法基于实际控制对象,先后用到了“变速积分”“,抗积分饱和”“,活用微分项”“,给定值平移”等方法。其中“活用微分项”“,给定值平移”等方法是笔者自己提出来的。经过实验验证,相比传统PID算法,上述改进方法的综合利用取得了显著效果。关键词:改进PID控制变速积分抗积分饱和活用微分项给定值平移En

改进质心跟踪算法在实时空中目标跟踪中的应用研究.docx
改进质心跟踪算法在实时空中目标跟踪中的应用研究摘要随着航空技术和机器视觉的进步,在实时空中目标跟踪领域中,质心跟踪算法扮演着重要的角色。本文通过研究质心跟踪算法在实时空中目标跟踪中的应用,总结了其优点和不足之处,并提出了一种改进的质心跟踪算法。实验结果表明,该算法在目标跟踪精度和实时性方面都有较好的表现。所以,改进的质心跟踪算法在实时空中目标跟踪应用中具有广阔的应用前景。关键词:质心跟踪算法,实时空中目标跟踪,航空技术,机器视觉,目标跟踪精度,实时性I.引言在航空领域中,实时空中目标跟踪是一项重要的任务,

改进遗传算法在二次供水PID控制中的应用研究.docx
改进遗传算法在二次供水PID控制中的应用研究随着城市化的不断发展,二次供水系统的重要性日益凸显。PID控制器是最常见的控制策略之一,具有简单、可靠、易于实现等优点,使其被广泛应用于二次供水系统中。然而,PID控制器并不总是能够满足二次供水系统的控制要求,因为二次供水系统中存在多变的工况和噪声干扰,使其不断进入非线性、不可预测的状态。因此,为了提高二次供水系统的控制性能,需要使用更加高效的算法来设计PID控制器。遗传算法作为一种具有潜在应用价值的启发式优化算法,被广泛应用于PID控制器的设计中,其应用范围涵