
山地坡度自适应星载光子计数激光雷达点云去噪方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

山地坡度自适应星载光子计数激光雷达点云去噪方法.docx
山地坡度自适应星载光子计数激光雷达点云去噪方法山地坡度自适应星载光子计数激光雷达点云去噪方法摘要:星载光子计数激光雷达(PLR)是一种新兴的遥感技术,具有高分辨率、高精度的特点。然而,由于山地环境的复杂性,导致PLR采集到的点云数据中存在大量的噪声。针对这一问题,本文提出了一种山地坡度自适应的PLR点云去噪方法。该方法通过分析点云数据中每个点的相邻点之间的坡度关系,逐步筛选出符合特定阈值的点云数据,以实现去噪的目的。关键词:星载光子计数激光雷达;点云数据;去噪方法;山地坡度自适应;噪声引言星载光子计数激光

一种基于光子计数激光雷达的去噪方法.pptx
基于光子计数激光雷达的去噪方法01添加章节标题光子计数激光雷达原理工作原理简介光子计数激光雷达的优势光子计数激光雷达的应用领域去噪方法介绍去噪的必要性常见的去噪方法基于光子计数激光雷达的去噪方法的特点基于光子计数激光雷达的去噪方法实现去噪算法的原理去噪算法的实现过程去噪算法的效果评估去噪方法的效果分析去噪前后效果对比去噪方法在不同场景下的适用性去噪方法的优缺点分析去噪方法的实际应用案例案例一:无人驾驶汽车中的应用案例二:环境监测中的应用案例三:遥感测量中的应用案例四:其他领域的应用未来研究方向与展望基于光
一种星载光子计数激光雷达数据的地面光子提取方法.pdf
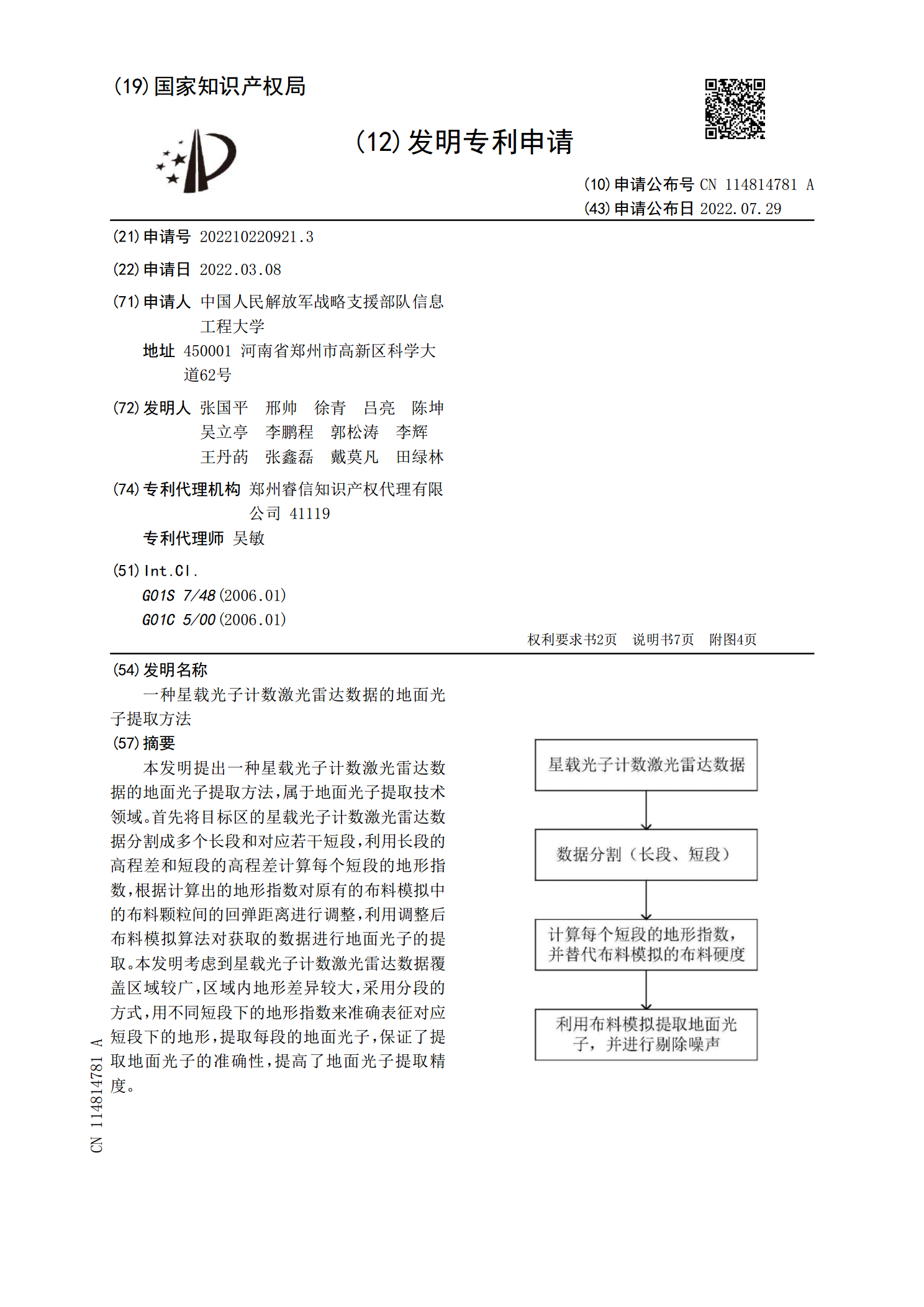
本发明提出一种星载光子计数激光雷达数据的地面光子提取方法,属于地面光子提取技术领域。首先将目标区的星载光子计数激光雷达数据分割成多个长段和对应若干短段,利用长段的高程差和短段的高程差计算每个短段的地形指数,根据计算出的地形指数对原有的布料模拟中的布料颗粒间的回弹距离进行调整,利用调整后布料模拟算法对获取的数据进行地面光子的提取。本发明考虑到星载光子计数激光雷达数据覆盖区域较广,区域内地形差异较大,采用分段的方式,用不同短段下的地形指数来准确表征对应短段下的地形,提取每段的地面光子,保证了提取地面光子的准确

基于自然地表的星载光子计数激光雷达在轨标定.docx
基于自然地表的星载光子计数激光雷达在轨标定基于自然地表的星载光子计数激光雷达在轨标定摘要:星载光子计数激光雷达被广泛应用于地球观测和测量领域,以获取地表地貌、植被和大气等信息。然而,在应用中,光子计数激光雷达的准确性和稳定性面临着很大的挑战。本文基于自然地表的星载光子计数激光雷达在轨标定进行了深入研究,提出了一种有效的标定方法。实验证明,该方法能够提高光子计数激光雷达的测量精度和稳定性,提高地球观测数据的质量。1.引言星载光子计数激光雷达是基于光子计数技术的激光雷达系统,通过测量回波光子数来获取地球表面的

一种利用星载单光子激光雷达海面点云反演水深的方法.pdf
本发明涉及利用星载单光子激光雷达海面点云反演水深的方法,属于激光遥感技术领域。对星载单光子激光雷达获取的原始光子点云进行海面光子信号提取,通过数据平滑算法拟合海面高程轮廓,提取出海面沿卫星飞行方向不同位置的波浪波长参数。基于线性波理论建立海面波浪波长、周期与水深的关系,利用深水区域波浪波长计算出波浪周期信息;利用波浪周期在深水、浅水区域不变的原理,利用单光子激光雷达计算的浅水波浪波长、波浪周期信息,计算浅水区域的水深结果。本发明通过星载单光子激光雷达获取的光子点云数据,快速准确地计算当地水深;利用所观测的