
一种利用星载单光子激光雷达海面点云反演水深的方法.pdf

秋花****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种利用星载单光子激光雷达海面点云反演水深的方法.pdf
本发明涉及利用星载单光子激光雷达海面点云反演水深的方法,属于激光遥感技术领域。对星载单光子激光雷达获取的原始光子点云进行海面光子信号提取,通过数据平滑算法拟合海面高程轮廓,提取出海面沿卫星飞行方向不同位置的波浪波长参数。基于线性波理论建立海面波浪波长、周期与水深的关系,利用深水区域波浪波长计算出波浪周期信息;利用波浪周期在深水、浅水区域不变的原理,利用单光子激光雷达计算的浅水波浪波长、波浪周期信息,计算浅水区域的水深结果。本发明通过星载单光子激光雷达获取的光子点云数据,快速准确地计算当地水深;利用所观测的

基于ICESat--2星载激光雷达光子云数据反演森林冠层高度方法研究的开题报告.docx
基于ICESat--2星载激光雷达光子云数据反演森林冠层高度方法研究的开题报告一、选题背景森林作为地球最重要的陆地生态系统之一,对于气候稳定、水文循环、生物多样性以及土地利用等方面有着不可替代的作用。其中,森林冠层高度是评估森林生态系统健康、生物多样性、碳储量等关键指标之一。因此,精确地获取森林冠层高度非常重要。传统的森林冠层高度测量方法主要有借助地面点位、航空摄影、合成孔径雷达和激光雷达等。而在最近几十年,随着卫星遥感技术的快速发展,一些星载激光雷达技术也开始应用于森林冠层高度测量。这些技术主要依赖于基
一种星载光子计数激光雷达数据的地面光子提取方法.pdf
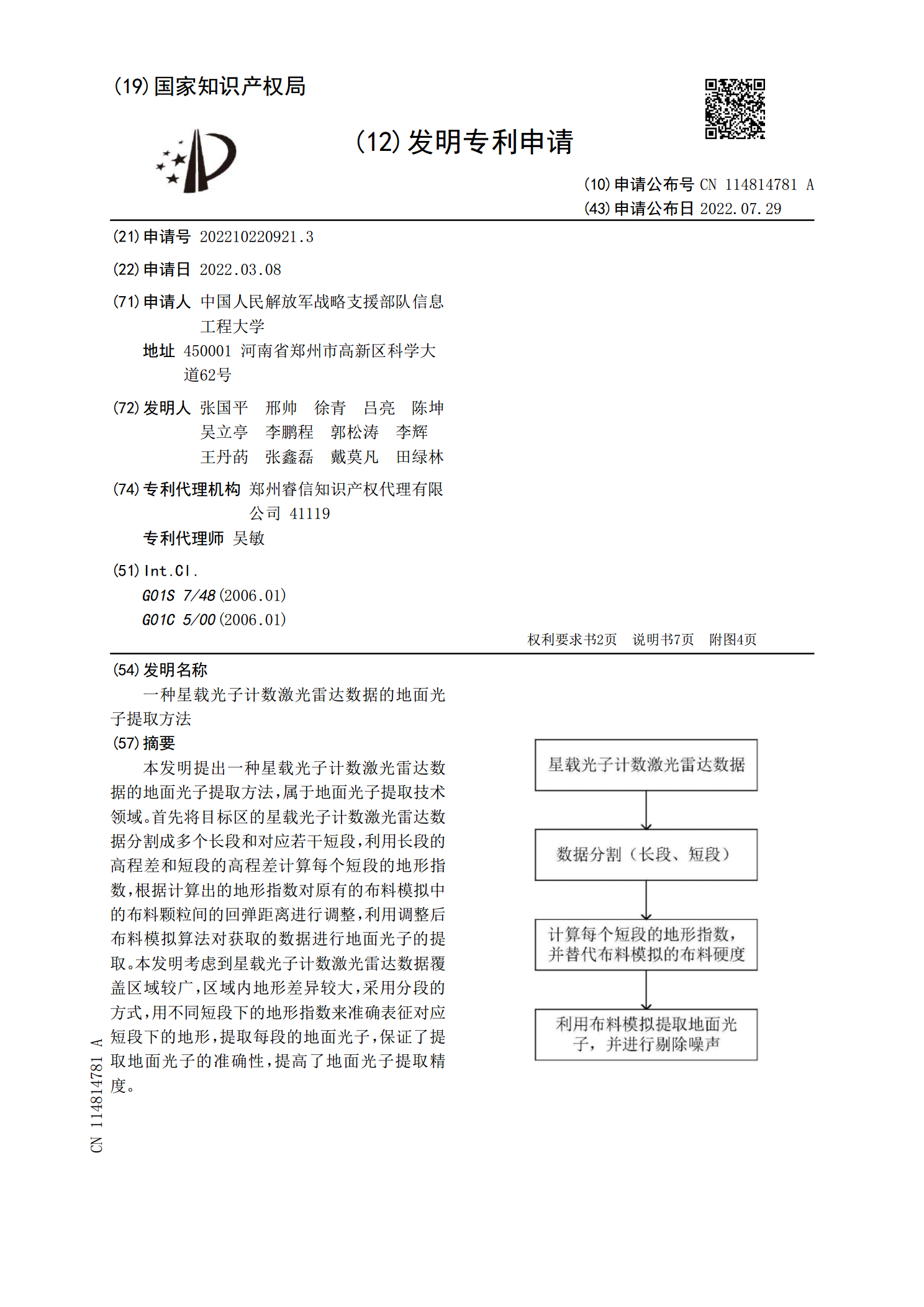
本发明提出一种星载光子计数激光雷达数据的地面光子提取方法,属于地面光子提取技术领域。首先将目标区的星载光子计数激光雷达数据分割成多个长段和对应若干短段,利用长段的高程差和短段的高程差计算每个短段的地形指数,根据计算出的地形指数对原有的布料模拟中的布料颗粒间的回弹距离进行调整,利用调整后布料模拟算法对获取的数据进行地面光子的提取。本发明考虑到星载光子计数激光雷达数据覆盖区域较广,区域内地形差异较大,采用分段的方式,用不同短段下的地形指数来准确表征对应短段下的地形,提取每段的地面光子,保证了提取地面光子的准确

山地坡度自适应星载光子计数激光雷达点云去噪方法.docx
山地坡度自适应星载光子计数激光雷达点云去噪方法山地坡度自适应星载光子计数激光雷达点云去噪方法摘要:星载光子计数激光雷达(PLR)是一种新兴的遥感技术,具有高分辨率、高精度的特点。然而,由于山地环境的复杂性,导致PLR采集到的点云数据中存在大量的噪声。针对这一问题,本文提出了一种山地坡度自适应的PLR点云去噪方法。该方法通过分析点云数据中每个点的相邻点之间的坡度关系,逐步筛选出符合特定阈值的点云数据,以实现去噪的目的。关键词:星载光子计数激光雷达;点云数据;去噪方法;山地坡度自适应;噪声引言星载光子计数激光

利用星载激光雷达背景噪声反演水体遥感反射率的方法.pdf
本发明公开利用星载激光雷达背景噪声反演水体遥感反射率的方法,属于脉冲技术和机械振动或超声波、声波或次声波的测量技术领域,用于反演水体遥感反射率,包括计算大气漫射透过率,星载激光雷达的总背景噪声建模,星载激光雷达的大气校正,水体遥感反射率的计算。本发明基于互易性角度,将星载激光雷达的太阳背景噪声转换为激光雷达窄带滤光片对应波段的水色遥感相机信号,通过构建星载激光雷达总背景噪声模型,移除大气与水面的噪声贡献,进而获取对应的离水噪声项并反演水体遥感反射率,将“无用的”星载激光雷达背景噪声数据合理利用,为给定星载