
基于遗传算法的串联机械臂运动学参数标定.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于遗传算法的串联机械臂运动学参数标定.docx
基于遗传算法的串联机械臂运动学参数标定随着机器人技术的不断发展,机械臂已经成为工业制造、服务机器人等领域中不可缺少的设备之一。而机械臂的运作效率和精度与其运动学参数的标定密切相关。因此,机械臂运动学参数标定一直是机械臂领域中重要的研究课题之一。本文介绍了一种基于遗传算法的串联机械臂运动学参数标定方法,并对该方法进行了实验验证。一、研究背景机械臂由多个关节组成,每个关节都有一组运动学参数,包括关节角度、长度、偏移量和旋转角度等。为了实现机械臂的准确运动,需要精确标定这些参数。传统的机械臂运动学参数标定方法包

基于运动学参数标定方法的机械臂误差分析与仿真研究.docx
基于运动学参数标定方法的机械臂误差分析与仿真研究基于运动学参数标定方法的机械臂误差分析与仿真研究摘要:机器人技术在工业领域的应用越来越广泛,机械臂是其中重要的组成部分。机械臂的工作精度直接影响着生产效率和产品质量。本文以运动学参数标定方法为基础,对机械臂误差分析与仿真进行研究。通过对机械臂的运动学参数进行准确标定,可以有效地降低机械臂的误差,提升机械臂的工作精度和稳定性。关键词:机械臂,运动学参数,误差分析,仿真研究1.引言机器人技术的发展在工业生产和科研领域起着重要的作用。机械臂作为机器人技术的核心组成
一种机械臂运动学参数标定方法及系统.pdf
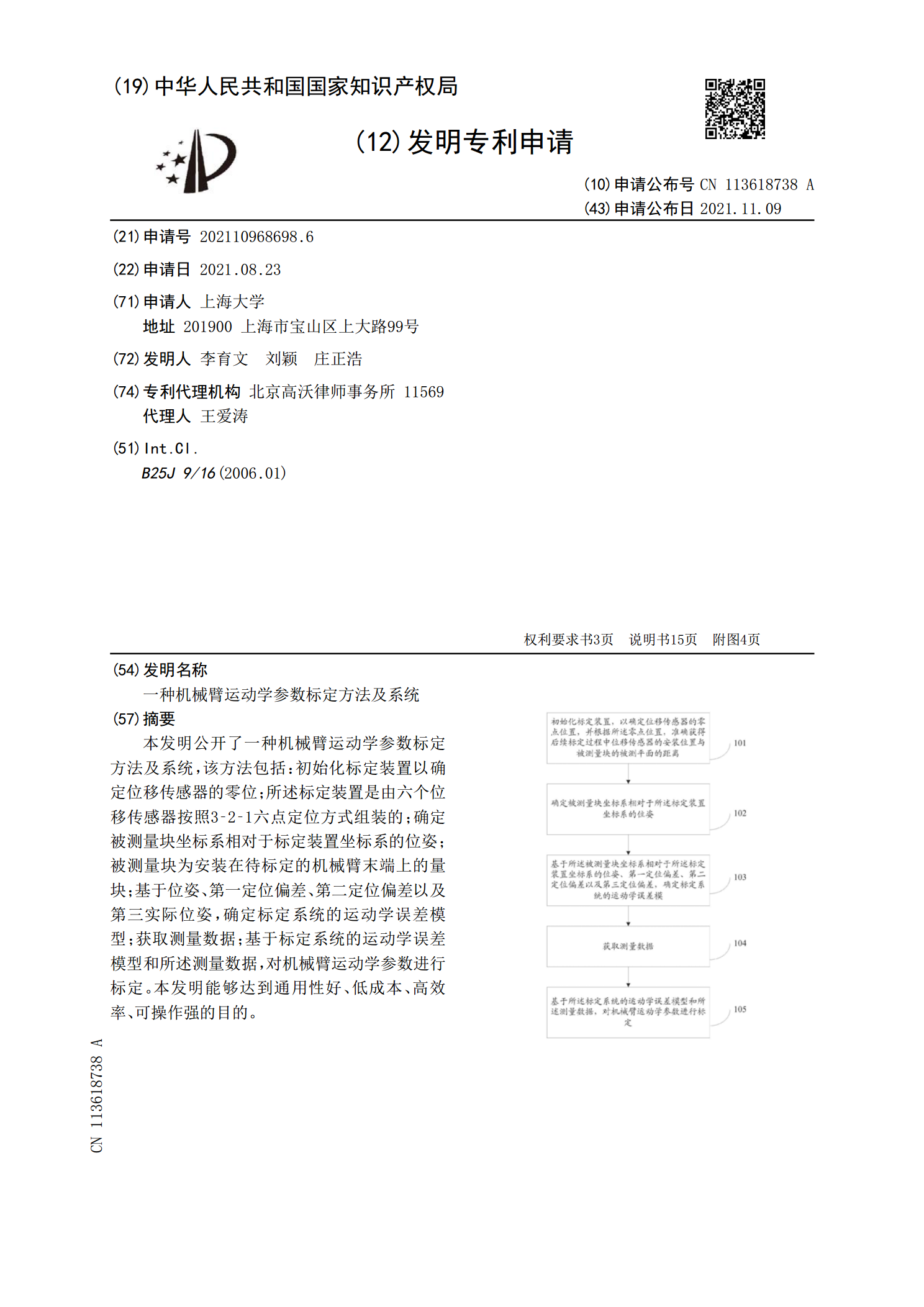
本发明公开了一种机械臂运动学参数标定方法及系统,该方法包括:初始化标定装置以确定位移传感器的零位;所述标定装置是由六个位移传感器按照3‑2‑1六点定位方式组装的;确定被测量块坐标系相对于标定装置坐标系的位姿;被测量块为安装在待标定的机械臂末端上的量块;基于位姿、第一定位偏差、第二定位偏差以及第三实际位姿,确定标定系统的运动学误差模型;获取测量数据;基于标定系统的运动学误差模型和所述测量数据,对机械臂运动学参数进行标定。本发明能够达到通用性好、低成本、高效率、可操作强的目的。

基于光轴约束的机械臂运动学标定方法.docx
基于光轴约束的机械臂运动学标定方法摘要机械臂是很重要的工业机器人,在其使用过程中准确的运动学标定是必不可少的,因为这直接影响到了机械臂的运动能力。本文主要介绍了一种基于光轴约束的机械臂运动学标定方法,该算法可以有效提高运动学标定的准确度与精度,同时还可以降低标定的时间成本,提高生产效率,是一种非常具有实用价值的算法。关键词:机械臂;运动学标定;光轴约束;精度;准确度;时间成本1.引言机械臂是一种能够实现多自由度运动的工业机器人,而机械臂的运动学标定是实现其运动的基础。在机械臂的应用中,需要准确测量机械臂的

机械臂运动学参数的高精度标定方法研究的开题报告.docx
机械臂运动学参数的高精度标定方法研究的开题报告一、选题背景及意义机械臂作为工业自动化领域中的核心设备之一,可广泛应用于智能制造、物流配送、协作机器人等领域。在机械臂的应用过程中,精度是关键问题之一,而机械臂的精度又与运动学参数有关。因此,机械臂运动学参数的高精度标定方法研究具有重要的现实意义。二、研究内容及方法本文将研究机械臂运动学参数的高精度标定方法,主要内容及方法如下:1.确定标定方法:本文将综合各种标定方法的优缺点,选择合适的标定方法。2.建立数学模型:以机械臂的运动学模型为基础,在MATLAB等工