
基于着陆雷达的飞机下滑航迹融合算法设计与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于着陆雷达的飞机下滑航迹融合算法设计与实现.docx
基于着陆雷达的飞机下滑航迹融合算法设计与实现随着航空工业的发展以及飞机的不断更新换代,飞行安全一直是实现航空产业可持续发展的重要保障之一,因此,着陆雷达技术的应用也越来越重要。着陆雷达是一种被广泛应用的机载设备,主要用于测量飞机在降落过程中相对于跑道的水平和垂直位置以及速度。而着陆过程中的航迹融合算法则能有效提高着陆的安全性和准确性。本文从以下几个方面分析了基于着陆雷达技术的飞机下滑航迹融合算法的设计与实现。一、着陆雷达技术原理着陆雷达是一种主动雷达,它可以向目标发射脉冲信号,并通过接收目标反射回来的信号

基于某型雷达的着陆航迹纠偏监控研究.pptx
基于某型雷达的着陆航迹纠偏监控研究目录雷达系统概述雷达工作原理雷达系统组成雷达系统功能着陆航迹纠偏技术航迹纠偏的意义航迹纠偏的方法航迹纠偏的原理基于某型雷达的着陆航迹纠偏监控系统设计系统总体设计雷达数据处理模块航迹纠偏算法模块系统监控模块系统实现与测试系统实现流程测试环境与测试方法测试结果与分析系统性能评估结论与展望研究结论研究不足与展望感谢观看

基于跟踪质量熵的分布式组网雷达航迹融合算法.pptx
,目录PartOnePartTwo算法定义算法应用场景算法优势与局限性PartThree跟踪质量熵概念跟踪质量熵计算方法跟踪质量熵在航迹融合中的作用PartFour分布式组网雷达系统结构雷达数据传输方式雷达数据处理流程PartFive航迹关联度计算航迹融合规则制定航迹融合结果输出PartSix评估指标选取实验场景设置实验结果分析结果对比与讨论PartSeven算法优缺点总结未来研究方向THANKS

基于线性预测的雷达航迹压缩算法.pptx
汇报人:/目录0102线性预测算法介绍线性预测算法的基本原理线性预测算法的应用场景03雷达航迹压缩算法介绍雷达航迹压缩算法的基本原理雷达航迹压缩算法的应用场景04基于线性预测的雷达航迹压缩算法介绍基于线性预测的雷达航迹压缩算法的基本原理基于线性预测的雷达航迹压缩算法的应用场景05数据预处理线性预测模型的建立与训练雷达航迹数据的压缩与重构压缩效果的评估与优化06算法优势分析算法局限性分析未来改进方向探讨汇报人:
基于机载雷达主被动监视的航迹融合方法.pdf
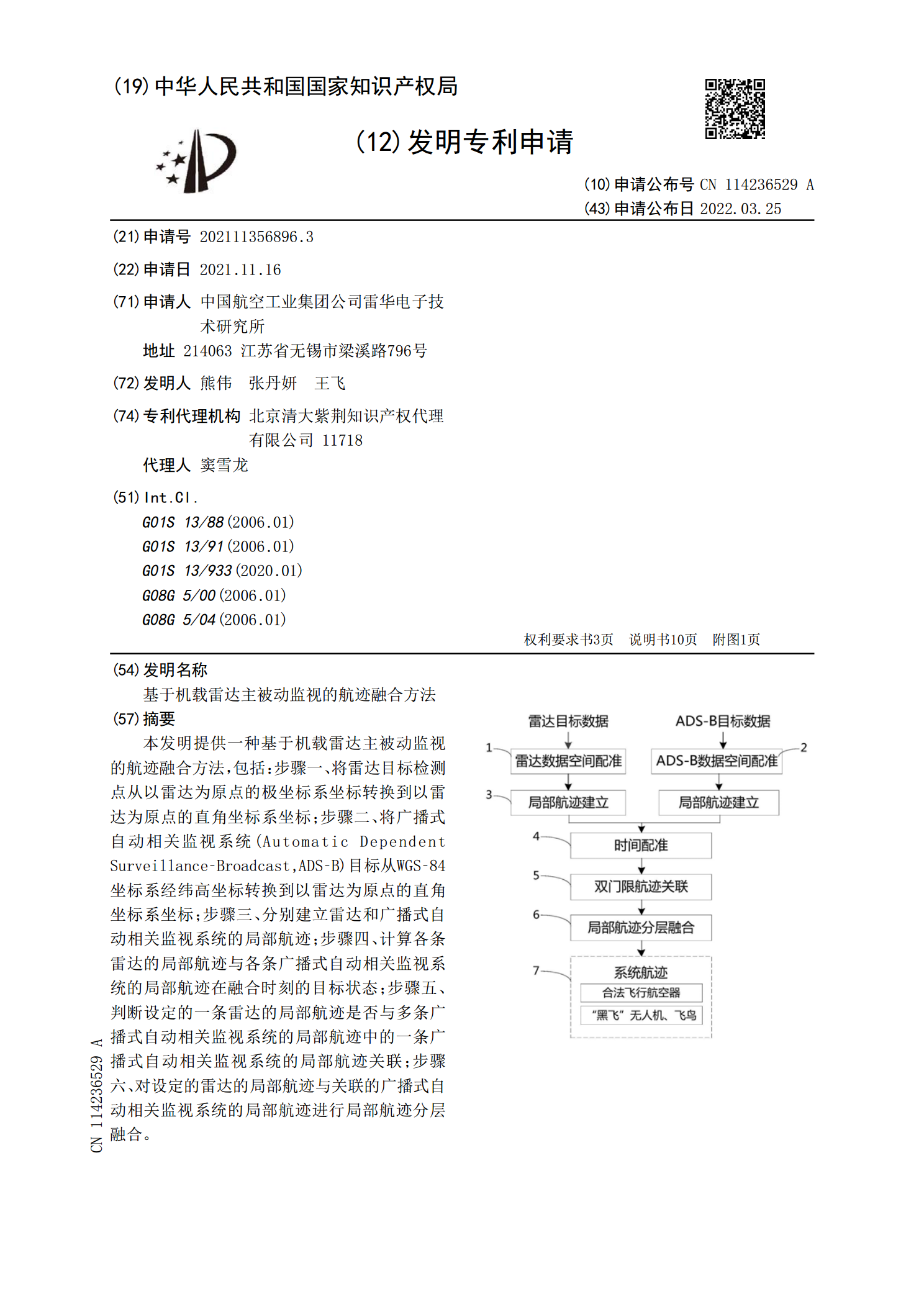
本发明提供一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统(AutomaticDependentSurveillance‑Broadcast,ADS‑B)目标从WGS‑84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定