
基于激光雷达距离像的目标3D姿态估计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光雷达距离像的目标3D姿态估计.docx
基于激光雷达距离像的目标3D姿态估计激光雷达(LiDAR)技术在自动驾驶、机器人导航、地形测绘、建筑结构监测等领域中广泛应用,其可以高精度地测量地面和物体的距离和位置信息。随着激光雷达的普及,对目标的3D姿态估计的需求也逐渐增加。本文将介绍基于激光雷达距离像的目标3D姿态估计的研究现状、方法和应用。一、研究现状目标3D姿态估计是计算机视觉领域的一个重要研究方向,其可用于目标识别、行为分析、增强现实等应用。激光雷达由于其高精度、高速度、大视野等优点,已成为3D姿态估计的重要工具。目前,基于激光雷达距离像的目
基于无监督域自适应的目标3D姿态估计方法.pdf
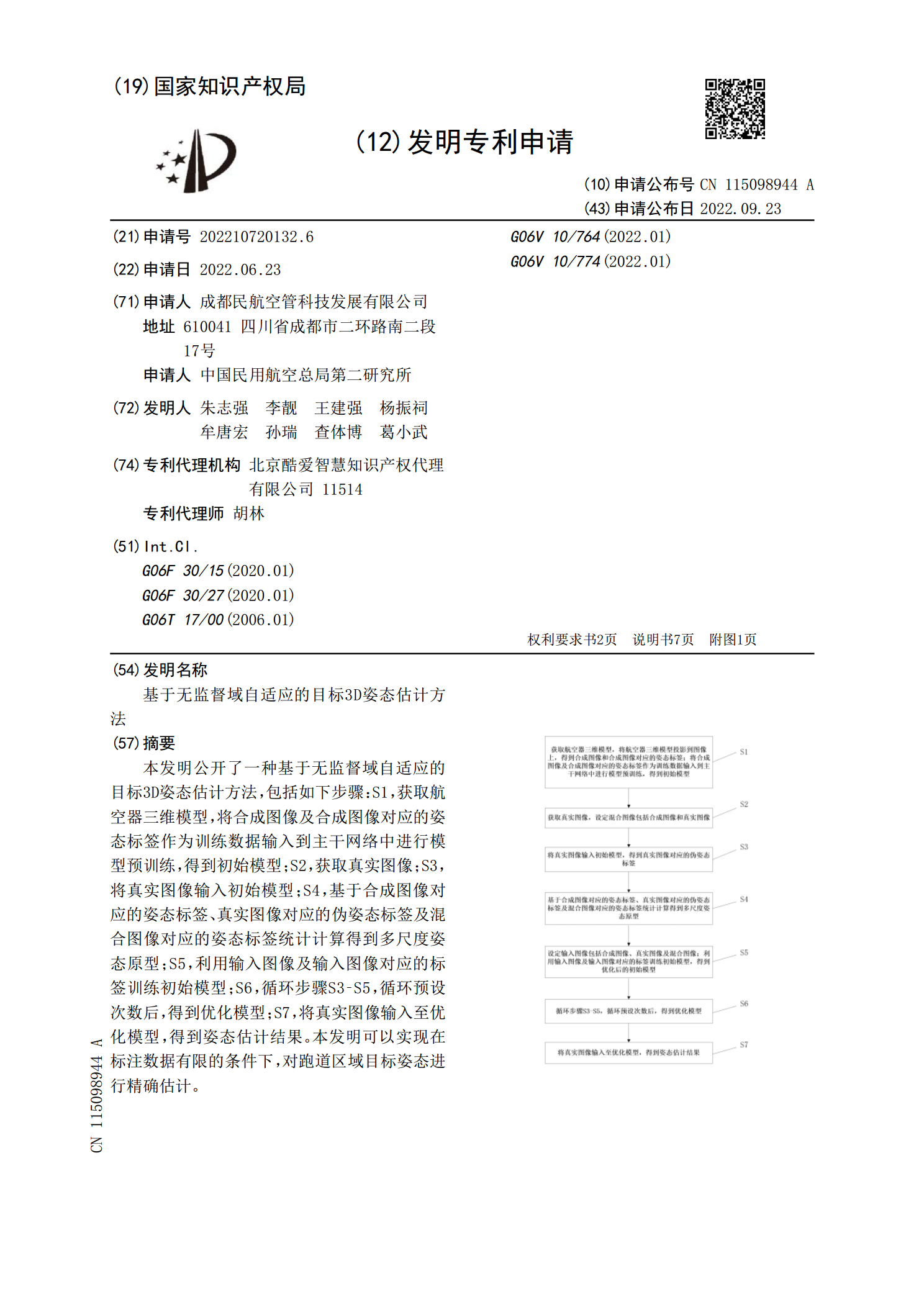
本发明公开了一种基于无监督域自适应的目标3D姿态估计方法,包括如下步骤:S1,获取航空器三维模型,将合成图像及合成图像对应的姿态标签作为训练数据输入到主干网络中进行模型预训练,得到初始模型;S2,获取真实图像;S3,将真实图像输入初始模型;S4,基于合成图像对应的姿态标签、真实图像对应的伪姿态标签及混合图像对应的姿态标签统计计算得到多尺度姿态原型;S5,利用输入图像及输入图像对应的标签训练初始模型;S6,循环步骤S3‑S5,循环预设次数后,得到优化模型;S7,将真实图像输入至优化模型,得到姿态估计结果。本

基于双距离像的空间目标多姿态角特征融合识别算法.docx
基于双距离像的空间目标多姿态角特征融合识别算法摘要针对现有的目标识别算法在多姿态角识别方面存在的问题,本文提出了一种基于双距离像的空间目标多姿态角特征融合识别算法。该算法首先利用双距离像对目标进行特征提取,然后分别计算不同姿态角度下的特征向量,最后采用融合的方法将各个角度下的特征向量整合在一起,从而提高了目标识别的准确性。实验结果表明,该算法能够有效提高空间目标多姿态角的识别准确率,具有较高的应用价值。关键词:目标识别、多姿态角、双距离像、特征融合、准确率AbstractInviewoftheproble

基于一维距离像序列的雷达目标微动参数估计.docx
基于一维距离像序列的雷达目标微动参数估计基于一维距离像序列的雷达目标微动参数估计摘要:雷达目标的微动参数估计是一项关键性任务,可用于目标检测、目标分类和目标跟踪等应用。本论文旨在探讨基于一维距离像序列的雷达目标微动参数估计方法。首先介绍了雷达原理和微动参数的含义,然后提出了基于一维距离像序列的目标微动参数估计算法。该算法主要包括目标跟踪、数据预处理、微动参数估计三个步骤。实验结果表明,基于一维距离像序列的雷达目标微动参数估计方法具有较高的准确性和可靠性。关键词:雷达目标;微动参数估计;一维距离像序列1.引

基于部分高分辨距离像的旋转微动目标参数估计方法.pdf
本发明基于部分高分辨距离像的旋转微动目标参数估计方法,采取的技术方案如下:第一步,雷达高分辨距离像矩阵获取;第二步,选取部分高分辨距离像;第三步,旋转微多普勒频率估计;第四步,目标旋转直径估计。本发明的有益效果在于:第一,不需要雷达对目标进行长时间观测,提高了雷达目标识别的效率;第二,能对被部分干扰的目标进行识别,提高了雷达目标识别的可靠性;第三,不需要进行大量复杂运算,仅仅利用解曲线方程的方式进行数学计算,计算量较小且过程较为便捷。