
基于内张力补偿的并联柔索机构控制系统的研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于内张力补偿的并联柔索机构控制系统的研究.docx
基于内张力补偿的并联柔索机构控制系统的研究基于内张力补偿的并联柔索机构控制系统的研究摘要并联柔索机构作为一种新型的柔性机构,具有高刚度、高精度和高可靠性等优点,已广泛应用于机器人、航空航天、医疗器械等领域。然而,由于柔索具有一定的松弛性和内张力,给系统的控制带来了一定的挑战。为了解决这个问题,本文研究了基于内张力补偿的并联柔索机构控制系统,提出了相应的控制策略,并进行了仿真实验验证,结果表明该控制系统能够有效地减小内张力对系统控制的影响,提高系统的精度和稳定性。第一章绪论1.1研究背景1.2国内外研究现状
基于并联柔索驱动的托举工装.pdf
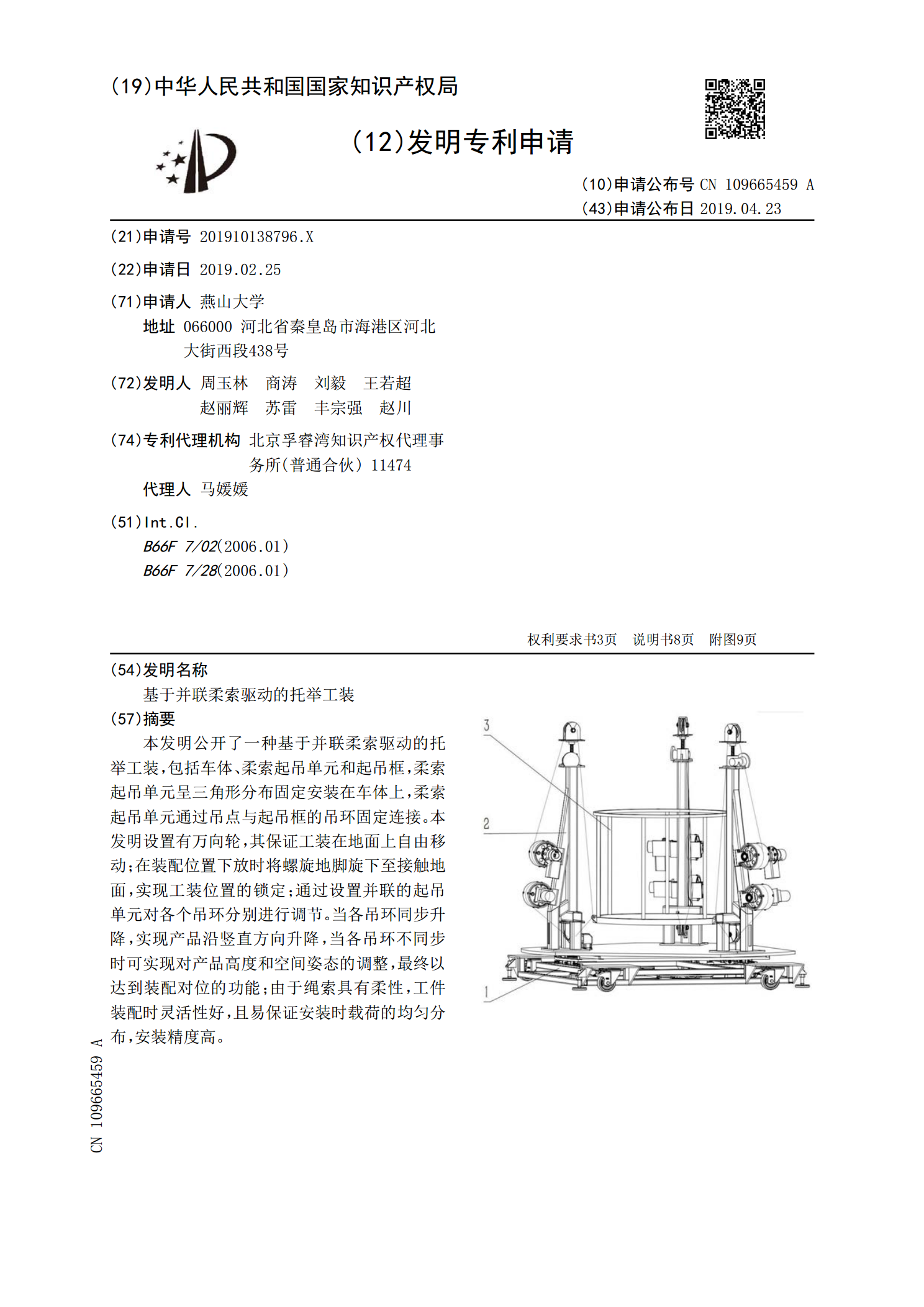
本发明公开了一种基于并联柔索驱动的托举工装,包括车体、柔索起吊单元和起吊框,柔索起吊单元呈三角形分布固定安装在车体上,柔索起吊单元通过吊点与起吊框的吊环固定连接。本发明设置有万向轮,其保证工装在地面上自由移动;在装配位置下放时将螺旋地脚旋下至接触地面,实现工装位置的锁定;通过设置并联的起吊单元对各个吊环分别进行调节。当各吊环同步升降,实现产品沿竖直方向升降,当各吊环不同步时可实现对产品高度和空间姿态的调整,最终以达到装配对位的功能;由于绳索具有柔性,工件装配时灵活性好,且易保证安装时载荷的均匀分布,安装精

柔索驱动并联加工机构的力学建模与分析.docx
柔索驱动并联加工机构的力学建模与分析随着科技的不断发展,越来越多的加工工序被自动化,其中并联加工机构由于其高效性和灵活性被广泛应用。柔索驱动并联加工机构是一种新型的并联机构,利用一些柔性零部件将驱动力传递到接口,实现高精度、高速度、大范围和多维度的加工。本文将重点讨论柔索驱动并联加工机构的力学建模与分析。一、柔索驱动并联加工机构的结构特点柔索驱动并联加工机构具有以下三个特点:1.柔性传动:采用松紧可调节的柔性绳索传动,这种传动方式不仅可以提高机构的柔性及重载能力,而且可以削减传动误差,从而提高机构的可靠性

基于索力优化的FAST柔索牵引并联机构的静力学分析.docx
基于索力优化的FAST柔索牵引并联机构的静力学分析摘要本次论文研究了基于索力优化的FAST柔索牵引并联机构的静力学分析。该机构利用柔性索来实现过高加速度运动,组成一个能够执行高速、高精度运动的平行机构。针对该机构的静力学问题,我们首先分析了索力的特点及其对机构性能的影响;其次,从机构力学静力平衡的角度出发,给出了基于虚功原理的静力学分析方法,并通过Matlab编程计算出了位姿特征对机构合力分布的影响。最终,本文总结了FAST柔索牵引并联机构的特点和优势,并提出了对其未来发展的展望和建议。关键词:柔索牵引并

一种基于并联柔索机构的重载吊装机器人.pdf
本发明属于先进制造与自动化领域,具体地说是一种基于并联柔索机构的重载吊装机器人,包括上平台、下平台和六根柔索,上平台为固定平台,下平台为运动平台,上平台和下平台以六根柔索相连构成Stewart型并联机构;每分支柔索通过定滑轮与电机卷筒与上平台相连,通过十字铰链与下平台相连;每分支的滑轮轴上安装编码器,可测量柔索长度变化;当上、下平台中心在同一铅垂线上且机器人动平台自然下垂平衡时,上平台滑轮中心点圆周半径和下平台的连接点圆周半径之间满足重力面条件,且各分支滑轮与转轴垂直的滑轮中心面与对应的重力面共面。本发明