
基于光流和惯性导航的小型无人机定位方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于光流和惯性导航的小型无人机定位方法.docx
基于光流和惯性导航的小型无人机定位方法1.引言小型无人机已经成为了许多应用领域中不可或缺的工具。无人机的飞行需要定位和导航的支持,因此开发一种高精度、高可靠性和低成本的定位方法是当前无人机技术研究中的热点问题之一。针对这一问题,本文提出了一种基于光流和惯性导航的小型无人机定位方法,该方法结合了两个不同的定位技术,可以极大地提高定位精度和鲁棒性。2.现有技术与问题目前,常用的无人机定位技术主要包括全球定位系统(GPS)、惯性测量单元(IMU)、视觉传感器和光流测量传感器等。GPS定位方法可以提供高精度的位置
基于卫星导航与惯性导航的无盲区车辆定位系统和方法.pdf
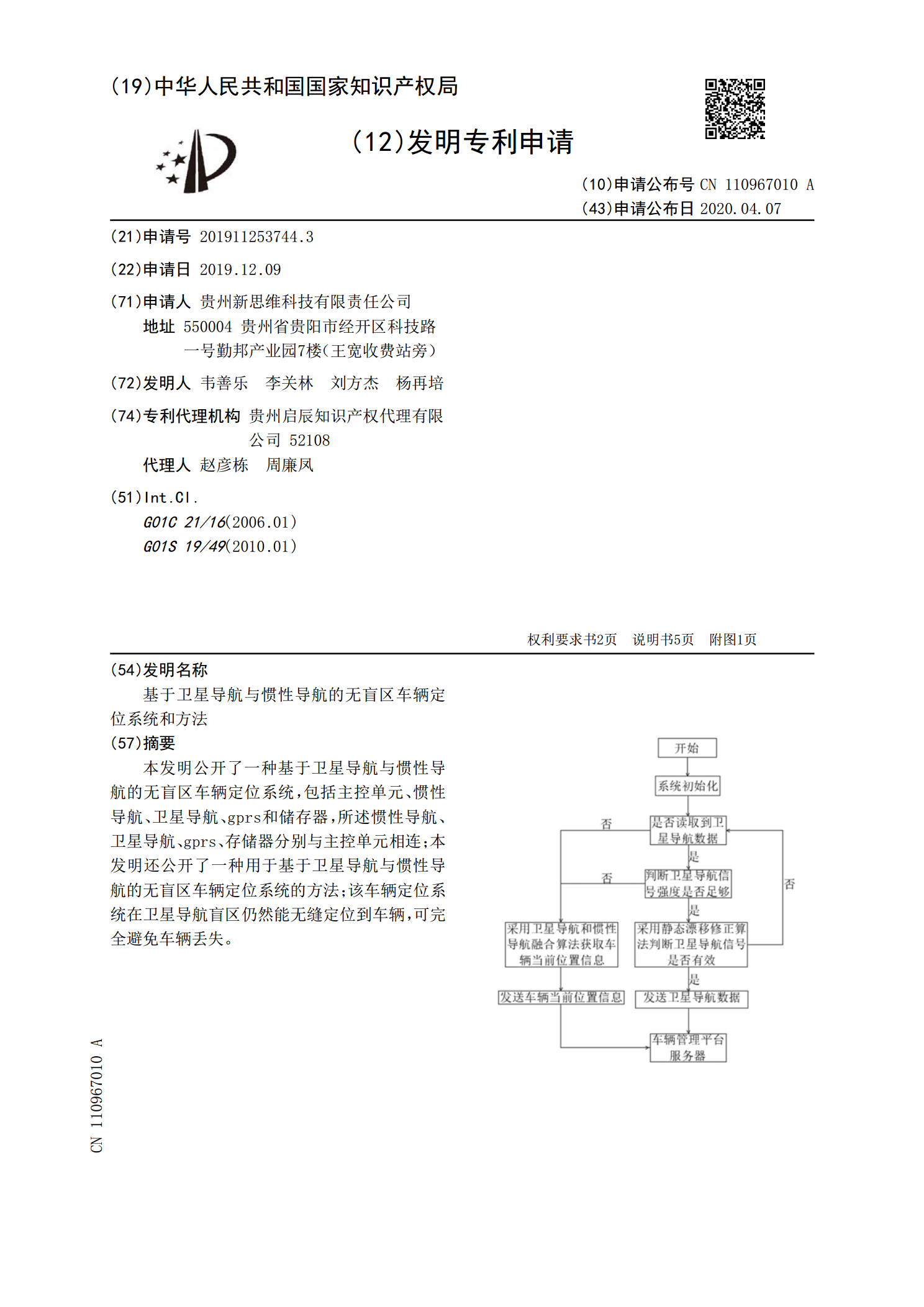
本发明公开了一种基于卫星导航与惯性导航的无盲区车辆定位系统,包括主控单元、惯性导航、卫星导航、gprs和储存器,所述惯性导航、卫星导航、gprs、存储器分别与主控单元相连;本发明还公开了一种用于基于卫星导航与惯性导航的无盲区车辆定位系统的方法;该车辆定位系统在卫星导航盲区仍然能无缝定位到车辆,可完全避免车辆丢失。

面向弱光流环境的惯性光流组合导航方法研究.docx
面向弱光流环境的惯性光流组合导航方法研究面向弱光流环境的惯性光流组合导航方法研究摘要:随着科技的发展,惯性导航系统在许多领域中得到了广泛应用。然而,面对弱光流环境,常规的惯性导航方法效果较差。本文针对这一问题,提出了一种面向弱光流环境的惯性光流组合导航方法。首先,在光流估计中利用改进的密集光流计算方法,提高了光流估计的准确性;其次,通过单目视觉和惯性测量单元的组合,实现了对目标位置和速度的估计。实验结果表明,该方法在弱光流环境下具有较好的导航性能。关键词:惯性导航;光流估计;组合导航;弱光流环境1.引言惯

基于光流算法的无人机局部导航.docx
基于光流算法的无人机局部导航基于光流算法的无人机局部导航摘要:无人机的局部导航是无人机自主飞行的重要组成部分,它能够在避障和定位等方面提供关键的支持。光流算法作为一种常见的无人机导航算法,通过利用图像流中像素的运动信息实现对无人机位置和姿态的估计,从而实现无人机的精密控制。本文首先介绍光流算法的原理和基本步骤,然后结合无人机局部导航的需求,详细探讨了光流算法在无人机局部导航中的应用,包括障碍物检测与避障、精确定位以及目标跟踪等方面。最后,通过实验验证了光流算法在无人机局部导航中的有效性和可行性。关键词:无

基于RFID和惯性导航的室内定位系统.docx
基于RFID和惯性导航的室内定位系统摘要:针对目前室内定位导航的定位限制因素多,准确度低等问题,研究了一种基于RFID和惯性导航的室内定位系统。该系统利用多从机定点的方式,通过射频定位和步行者航位推算进行RFID与惯性导航相结合,实时修正位置信息,降低积累误差。实验结果显示:与传统室内定位导航系统相比,此系统提高了室内导航的精度与覆盖力。关键词:射频识别;室内导航;惯性导航;室内定位;0引言近年来,定位服务正向室内发展,以满足日益增长的室内定位需求。室内定位技术分为2类:第一类为基于外置信号源的室内定位技