
基于主动视觉的手眼矩阵和光平面标定方法.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于主动视觉的手眼矩阵和光平面标定方法.docx
基于主动视觉的手眼矩阵和光平面标定方法摘要现代机器人技术中,手眼矩阵和光平面标定是非常重要的技术之一,其可以用于机器人的自主定位、运动控制、自动化操作等场景中。本文主要介绍了基于主动视觉的手眼矩阵和光平面标定方法。对于手眼标定,本文提出了使用相机和机械臂协同工作的方法,并且针对常见的标定误差进行了修正。对于光平面标定,本文提出了使用棋盘格和主动光源的方法,可以有效地提高标定的精度和鲁棒性。关键词:手眼矩阵、光平面标定、主动视觉、协同机器人、AbstractHand-eyematrixandlightpla

基于主动视觉的手眼系统自标定方法.docx
基于主动视觉的手眼系统自标定方法基于主动视觉的手眼系统自标定方法摘要:手眼系统是指由一个机械臂和一个固定相机构成的系统,主要用于实时定位和跟踪目标物体。手眼系统的准确度和精度对于许多自动化应用至关重要。本论文介绍了一种基于主动视觉的手眼系统自标定方法,该方法利用机械臂的自由度和相机的多个视角来自动计算手眼关系,以实现自动标定手眼系统的目的。实验证明,该方法可以显著提高手眼系统的准确度和稳定性。关键词:手眼系统、自标定、主动视觉、机械臂、相机1.引言手眼系统是很多工业自动化应用中常见的组成部分,例如机器人装

基于主动视觉的结构光手眼系统自标定方法.docx
基于主动视觉的结构光手眼系统自标定方法摘要本文提出了一种基于主动视觉的结构光手眼系统自标定方法。该方法结合了手眼标定和运动捕捉技术,实现了机器人手臂和相机之间自动的标定。实验结果表明,所提出的方法具有较高的精度和稳定性,能够广泛应用于机器人控制、虚拟现实等领域。关键词:主动视觉、结构光、手眼系统、自标定、机器人控制引言机器人控制在现代工业中起着至关重要的作用。而作为机器人控制中的一项基础任务,手眼系统的标定问题更是引起了人们的广泛关注。一般情况下,手眼标定是指通过相机采集机器人末端执行器的运动轨迹及其对应
基于三维视觉测量的手眼标定方法.pdf
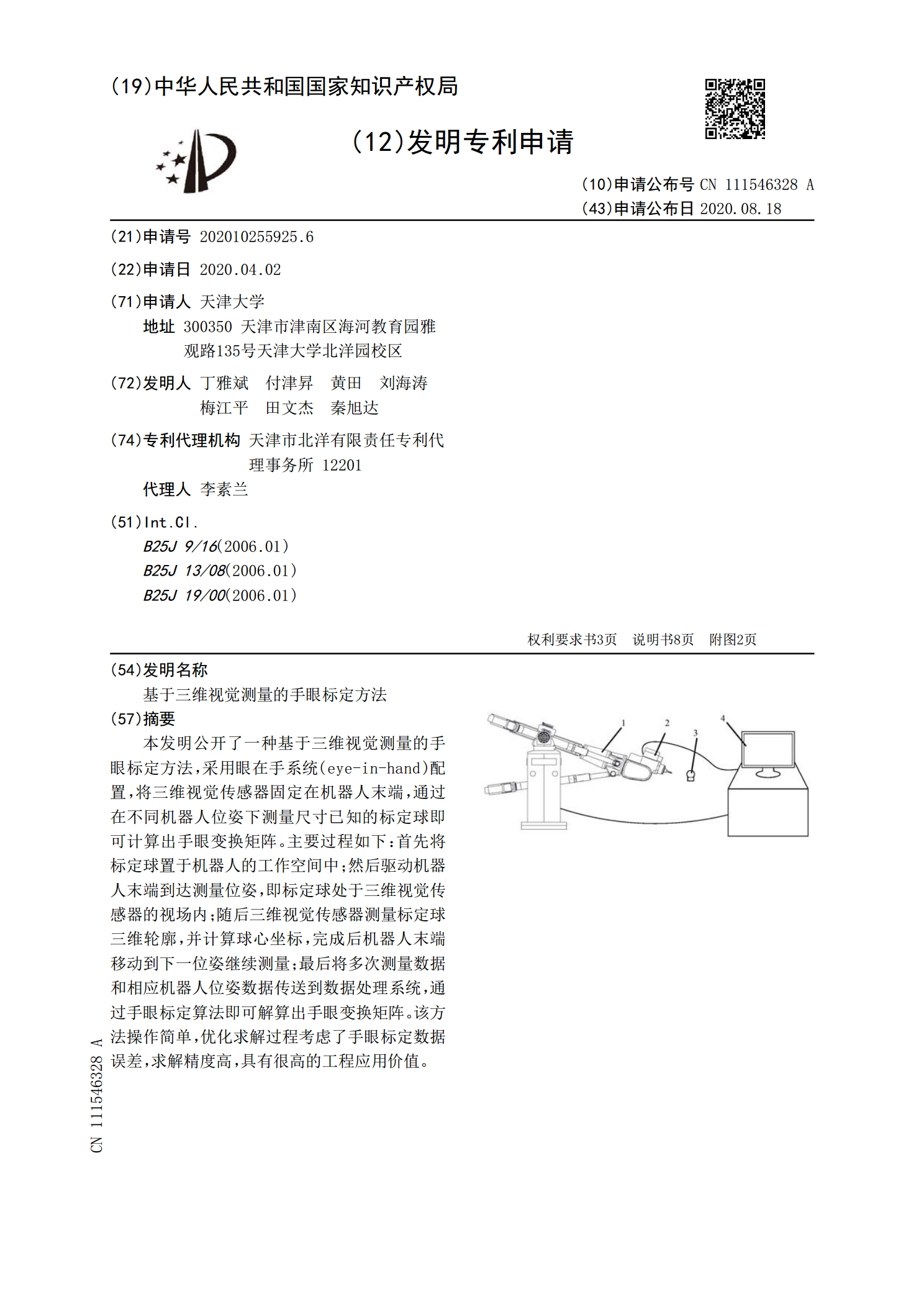
本发明公开了一种基于三维视觉测量的手眼标定方法,采用眼在手系统(eye‑in‑hand)配置,将三维视觉传感器固定在机器人末端,通过在不同机器人位姿下测量尺寸已知的标定球即可计算出手眼变换矩阵。主要过程如下:首先将标定球置于机器人的工作空间中;然后驱动机器人末端到达测量位姿,即标定球处于三维视觉传感器的视场内;随后三维视觉传感器测量标定球三维轮廓,并计算球心坐标,完成后机器人末端移动到下一位姿继续测量;最后将多次测量数据和相应机器人位姿数据传送到数据处理系统,通过手眼标定算法即可解算出手眼变换矩阵。该方法

一种线结构光视觉传感器手眼标定方法及仿真.docx
一种线结构光视觉传感器手眼标定方法及仿真一种线结构光视觉传感器手眼标定方法及仿真摘要:线结构光视觉传感器广泛应用于机器人的束位姿估计领域。本文提出了一种基于机器人末端执行器运动的线结构光视觉传感器手眼标定方法,该方法通过对线结构光视觉传感器拍摄的点云信息进行处理,并与机器人末端执行器的运动进行关联,实现了手眼标定的目的。同时,本文还利用MATLAB进行了基于实际数据的仿真验证,结果表明该手眼标定方法能够准确、快速地标定出线结构光视觉传感器与机器人末端执行器之间的相对坐标关系。关键词:机器人、线结构光视觉传