
基于复数全极化HRRP的雷达目标识别.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于复数全极化HRRP的雷达目标识别.docx
基于复数全极化HRRP的雷达目标识别摘要:本文提出了一种基于复数全极化高分辨率径向轨迹处理(HRRP)的雷达目标识别方法。该方法利用雷达波束发射的多个方向对目标进行全极化探测,得到目标在不同方向上的散射矩阵,然后使用HRRP处理目标的径向特征,在复数域上进行谱分析和特征提取,以实现目标识别。实验结果表明,该方法具有较高的分类准确率和性能。关键词:复数全极化HRRP;雷达目标识别;径向轨迹处理;谱分析;特征提取1.引言对于现代雷达应用,目标识别是一个非常重要的问题。随着雷达技术的不断发展,越来越多的基于复数
基于角域特征优化的雷达目标HRRP识别方法.pdf
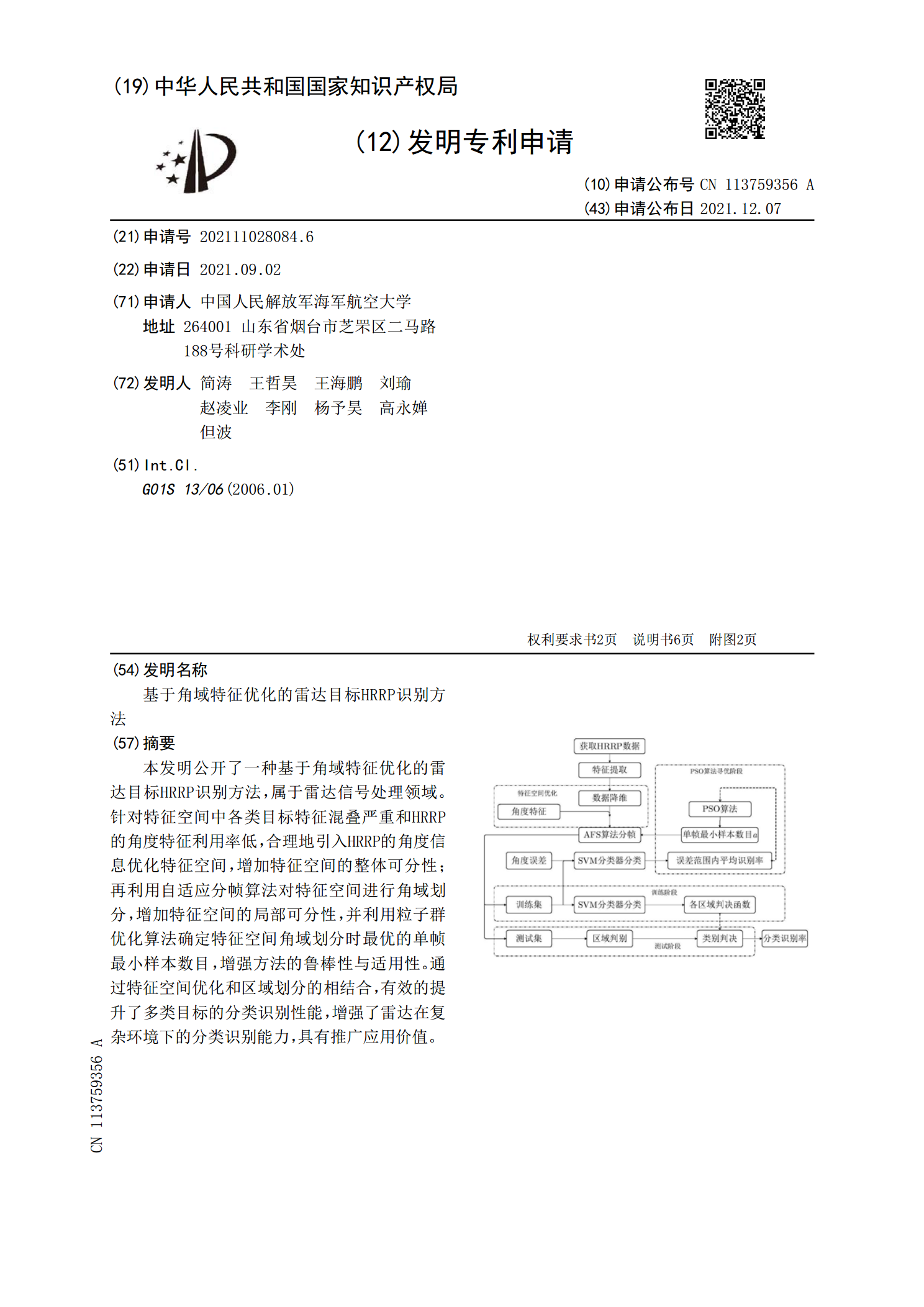
本发明公开了一种基于角域特征优化的雷达目标HRRP识别方法,属于雷达信号处理领域。针对特征空间中各类目标特征混叠严重和HRRP的角度特征利用率低,合理地引入HRRP的角度信息优化特征空间,增加特征空间的整体可分性;再利用自适应分帧算法对特征空间进行角域划分,增加特征空间的局部可分性,并利用粒子群优化算法确定特征空间角域划分时最优的单帧最小样本数目,增强方法的鲁棒性与适用性。通过特征空间优化和区域划分的相结合,有效的提升了多类目标的分类识别性能,增强了雷达在复杂环境下的分类识别能力,具有推广应用价值。

基于插值HRRP和SVM的雷达目标识别方法.docx
基于插值HRRP和SVM的雷达目标识别方法摘要雷达技术在目标探测与识别中具有很高的重要性。本文介绍了基于插值HRRP和SVM的雷达目标识别方法。该方法能够处理多个目标和背景杂波的混合信号,取得准确的识别结果。通过实验证明了该方法的有效性和实用性。此外,本文还讨论了该方法的局限性及待改进之处。1.引言在雷达目标识别中,信号处理是非常重要的一环。通过对信号进行高效处理,可以准确地识别出目标,提高雷达系统的性能。因此,如何有效地处理多个目标和背景杂波的混合信号,成为了一个重要的研究方向。经典的雷达目标识别方法通

基于卷积神经网络的雷达目标HRRP分类识别方法.pptx
,CONTENTS01.02.卷积神经网络的结构卷积神经网络的学习过程卷积神经网络的优势03.HRRP图像的采集HRRP图像的预处理流程预处理过程中的关键技术04.卷积神经网络在图像分类中的应用构建基于卷积神经网络的HRRP图像分类器训练和优化网络模型05.实验数据集介绍实验结果展示结果分析与其他方法的比较06.本研究的主要贡献存在的不足与局限性未来研究方向感谢您的观看!

基于HRRP和JEM信号的雷达目标识别技术研究.docx
基于HRRP和JEM信号的雷达目标识别技术研究基于HRRP和JEM信号的雷达目标识别技术研究摘要:雷达目标识别是一项具有重要意义和挑战性的研究课题。本文通过分析高分辨率距离剖面(HRRP)和角度分布(JEM)信号,探讨了基于这两种信号的雷达目标识别技术。首先介绍了HRRP和JEM信号的特性和处理方法,然后探讨了它们在目标参数提取和目标识别中的应用。最后,对未来研究方向进行了展望。关键词:雷达目标识别;HRRP信号;JEM信号;目标参数提取;信号处理1.引言雷达目标识别是雷达技术的重要应用领域之一。目标识别