
基于GNSS的农机自动导航控制系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于GNSS的农机自动导航控制系统设计.docx
基于GNSS的农机自动导航控制系统设计随着科技的不断发展,传统的农业生产方式正在逐渐转型为数字化和智能化的生产方式。全球导航卫星系统(GNSS)的出现为农业机械的智能化升级提供了可能性。基于GNSS技术的农机自动导航控制系统,能够实现精准的作业,提高机械作业效率和作业质量,从而实现农业生产的智能化和高效化。一、GNSS技术简介GNSS技术是一种基于全球卫星导航系统的定位技术,主要是通过卫星信号来实现定位、导航和时间同步等功能。目前主要采用的卫星系统是美国的GPS(全球定位系统)和俄罗斯的GLONASS(全
基于北斗导航的农机精准定位作业控制系统.pdf
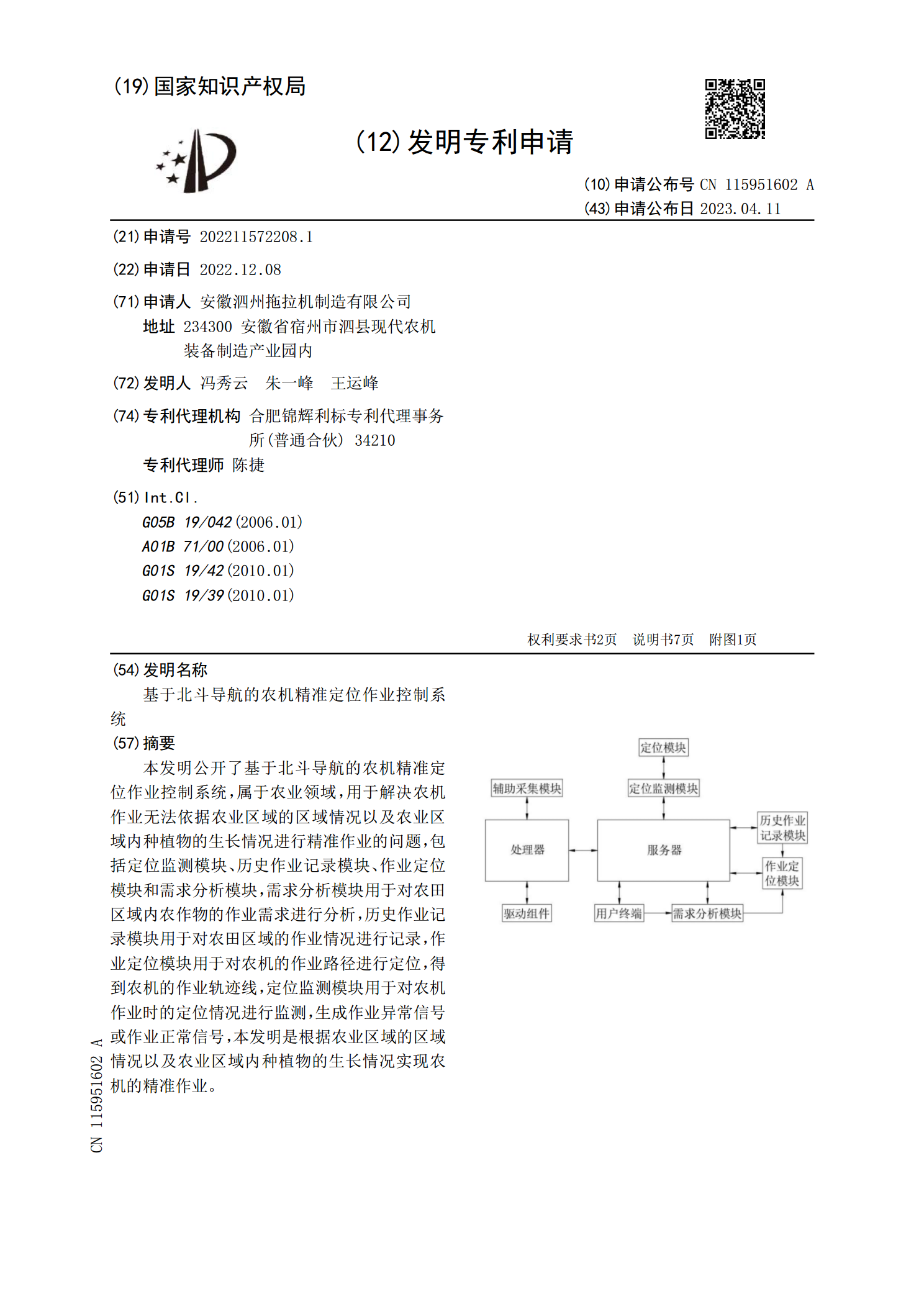
本发明公开了基于北斗导航的农机精准定位作业控制系统,属于农业领域,用于解决农机作业无法依据农业区域的区域情况以及农业区域内种植物的生长情况进行精准作业的问题,包括定位监测模块、历史作业记录模块、作业定位模块和需求分析模块,需求分析模块用于对农田区域内农作物的作业需求进行分析,历史作业记录模块用于对农田区域的作业情况进行记录,作业定位模块用于对农机的作业路径进行定位,得到农机的作业轨迹线,定位监测模块用于对农机作业时的定位情况进行监测,生成作业异常信号或作业正常信号,本发明是根据农业区域的区域情况以及农业区

一种基于GNSS-INS和视觉的农机组合导航系统.pdf
本发明公开了一种基于GNSS‑INS和视觉的农机组合导航系统,该系统包括结合全球卫星导航系统(GNSS)、惯性导航系统(INS)和视觉导航系统。全球卫星导航系统包括基站和移动站两部分,基站包括卫星天线、信号接收模块、无线电台发射端、卫星数据处理器;移动站包括卫星天线、信号接收模块、无线电台接收端、组合导航处理器。惯性导航系统包括IMU测量单元,用来测量农机行驶过程时的加速度、角速度等信息,并进行处理,得到农机的坐标位置信息。视觉导航系统包括视觉传感器、图像处理器;视觉传感器采集农机作业环境信息,传输至图像

履带式农机自动导航控制系统研究的任务书.docx
履带式农机自动导航控制系统研究的任务书任务书一、任务背景随着农业技术的不断发展,传统的机械化耕作已经不能适应现代化农业的需求。随着人口的增多,土地资源的减少,高效的农业生产已经成为社会所关注的热点之一。自动导航控制系统作为目前农业高科技中的一个重要组成部分,能够提高农机作业精度,提高农机作业效率,减轻劳动强度,减少对环境的污染等,因此迅速受到人们的关注。为了满足农业现代化和机械化发展的要求,需要开发一种高效、可靠、精准的履带式农机自动导航控制系统。二、任务目标1、研究现有的履带式农机自动导航控制系统,比较

基于红外的自动导航系统设计.docx
基于红外的自动导航系统设计基于红外的自动导航系统设计摘要:自动导航系统在现代社会的应用越来越广泛,既方便了人们的出行,也提高了交通效率。本文以基于红外的自动导航系统为研究对象,结合红外技术的原理与特点,设计了一种简单而实用的自动导航系统。通过对红外信号的接收与处理,实现了对环境中障碍物的检测与导航操作。实验结果表明,该系统能够准确地检测出障碍物,并为用户提供准确的导航信息。1.引言随着科技的不断发展,自动导航系统在各行各业的应用越来越广泛。自动导航系统能够为用户提供准确的导航信息,方便出行,并提高了交通效