
反向式行星滚柱丝杠机构运动原理及仿真分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

反向式行星滚柱丝杠机构运动原理及仿真分析.docx
反向式行星滚柱丝杠机构运动原理及仿真分析反向式行星滚柱丝杠机构运动原理及仿真分析摘要:本文针对反向式行星滚柱丝杠机构进行了运动原理和仿真分析,首先介绍了机构的结构特点和工作原理,然后建立了机构的运动学模型和动力学模型,通过仿真分析了机构的运动特性和负载能力。研究结果表明,反向式行星滚柱丝杠机构具有较高的精度和负载能力,适用于需要高精度和大扭矩传输的工业领域。关键词:反向式行星滚柱丝杠机构;运动原理;仿真分析;负载能力一、引言随着制造工艺和技术的不断进步,机器人和自动化装备越来越广泛地应用于工业现场。其中,

反向式行星滚柱丝杠承载分布及寿命分析.docx
反向式行星滚柱丝杠承载分布及寿命分析反向式行星滚柱丝杠是一种常用的传动装置,在工业自动化领域有广泛的应用。它通过行星滚柱和滚子轮的啮合运动来实现力的传递,具有高承载能力、高精度和高效率的特点。本文旨在通过分析反向式行星滚柱丝杠的承载分布和寿命,以了解其机理和应用。首先,本文将介绍反向式行星滚柱丝杠的基本结构和工作原理。反向式行星滚柱丝杠一般由行星滚柱、滚子轮、行星架等部分组成。当输入端旋转时,行星滚柱和滚子轮之间会产生进退运动,将输入的旋转运动转化为线性运动输出。这种结构可以实现高精度和高效率的力传递,广

行星滚柱丝杠机构.pdf
本发明公开了一种行星滚柱丝杠机构,包括滚柱保持架、滚柱、滚柱丝杠螺母和丝杠轴,滚柱在滚柱丝杠螺母与丝杠轴之间的环形空腔中沿周向布置多个,丝杠轴具有环形齿,滚柱丝杠螺母具有内螺纹,滚柱具有与滚柱丝杠螺母的内螺纹啮合的第一环形齿和与丝杠轴的环形齿啮合的第二环形齿,第二环形齿的齿距与丝杠轴的环形齿的齿距相同且第二环形齿和丝杠轴的环形齿的导程为零。本发明的行星滚柱丝杠机构,丝杠轴与滚柱均采用零导程的环形齿结构,两者在相对旋转运动时无轴向位移,滚柱与滚柱丝杠螺母在相对运动时产生轴向相对位移。本发明可以满足由动力源直
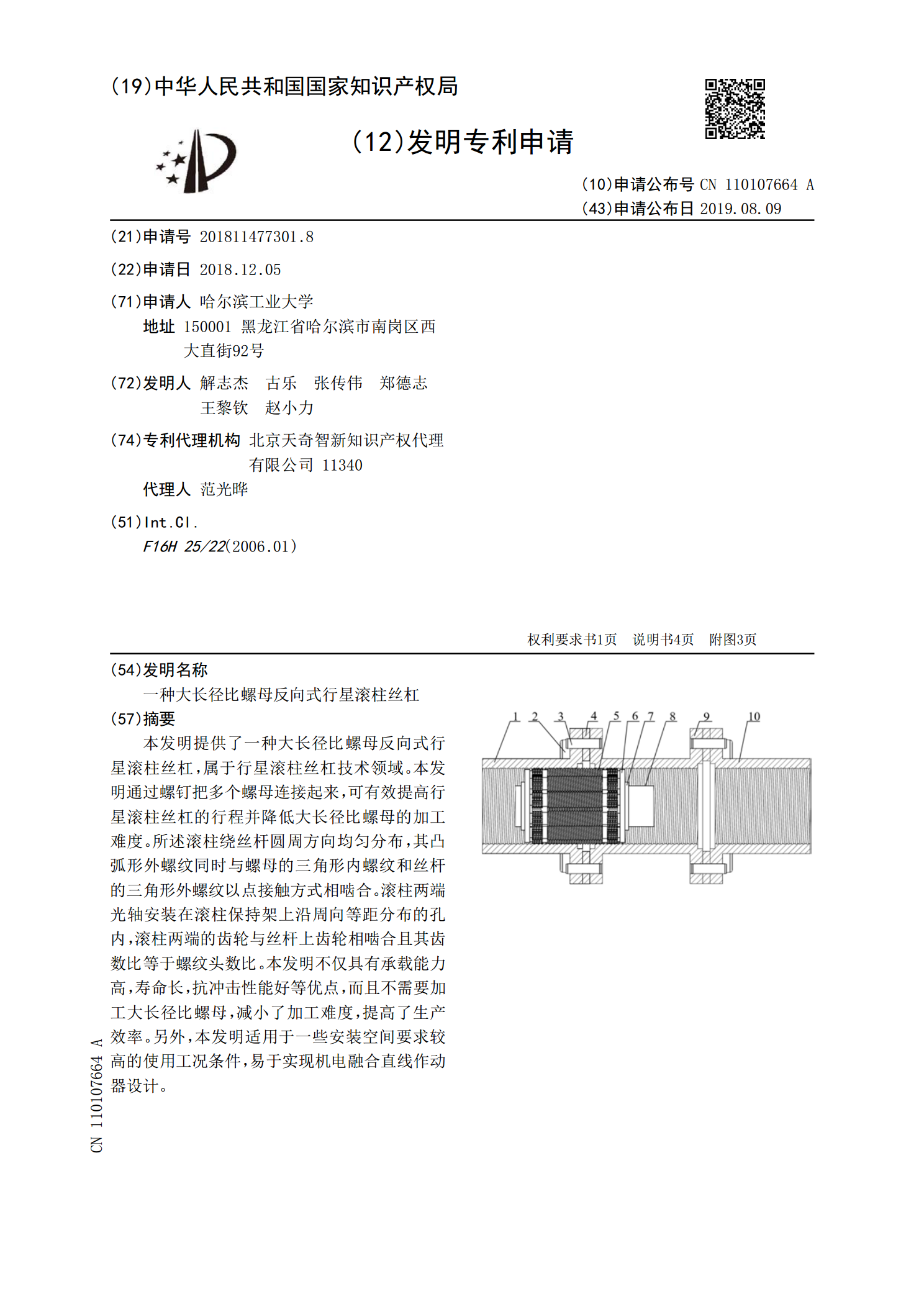
一种大长径比螺母反向式行星滚柱丝杠.pdf
本发明提供了一种大长径比螺母反向式行星滚柱丝杠,属于行星滚柱丝杠技术领域。本发明通过螺钉把多个螺母连接起来,可有效提高行星滚柱丝杠的行程并降低大长径比螺母的加工难度。所述滚柱绕丝杆圆周方向均匀分布,其凸弧形外螺纹同时与螺母的三角形内螺纹和丝杆的三角形外螺纹以点接触方式相啮合。滚柱两端光轴安装在滚柱保持架上沿周向等距分布的孔内,滚柱两端的齿轮与丝杆上齿轮相啮合且其齿数比等于螺纹头数比。本发明不仅具有承载能力高,寿命长,抗冲击性能好等优点,而且不需要加工大长径比螺母,减小了加工难度,提高了生产效率。另外,本发

差动式行星滚柱丝杠.pdf
本发明公开了一种差动式行星滚柱丝杠,其包括中间丝杠、齿圈、套筒、弹性部件和多个滚柱体,所述齿圈同轴套设于所述中间丝杠,多个所述滚柱体均绕设在所述齿圈与所述中间丝杠之间,且多个所述滚柱体均与所述齿圈、所述中间丝杠相啮合,所述套筒套设于所述中间丝杠上,所述弹性部件、所述齿圈和多个所述滚柱体均位于所述套筒内,且所述弹性部件抵靠于所述齿圈并对所述齿圈施加沿所述中间丝杠的轴向方向的作用力。通过弹性部件对齿圈施加作用力来提供预紧力,使得产生预紧力矩,从而降低了差动式行星滚柱丝杠预紧所带来的加工难度,降低成本,提高生产