
单目移动机器人相对位姿估计方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单目移动机器人相对位姿估计方法.docx
单目移动机器人相对位姿估计方法标题:基于单目视觉的移动机器人相对位姿估计方法摘要:移动机器人相对位姿估计是机器人导航和运动控制中的关键问题之一。本论文重点研究基于单目视觉的移动机器人相对位姿估计方法,以提高机器人在未知环境中的自主定位和导航能力。首先介绍了单目视觉的基本原理和特点,然后分析了传统的位姿估计方法的优缺点,并提出了几种基于单目视觉的相对位姿估计方法。1.引言随着机器人应用领域的不断拓展,要求机器人能够在各种复杂环境下进行定位和导航。相对位姿估计是机器人在环境中位置跟踪和移动控制的关键。传统的相

单目相机位姿估计的稳健正交迭代方法.pptx
,CONTENTS01.02.定义与目标算法流程迭代公式收敛性分析03.正交迭代算法原理正交迭代算法步骤正交迭代算法收敛性分析04.稳健性定义算法鲁棒性分析算法稳定性分析实验验证05.位姿估计问题描述位姿估计方法分类算法适用场景与限制实验结果对比分析06.应用领域与实例算法优缺点总结未来研究方向与展望感谢您的观看!
基于目标特征的单目视觉快速相对位姿估计系统及方法.pdf
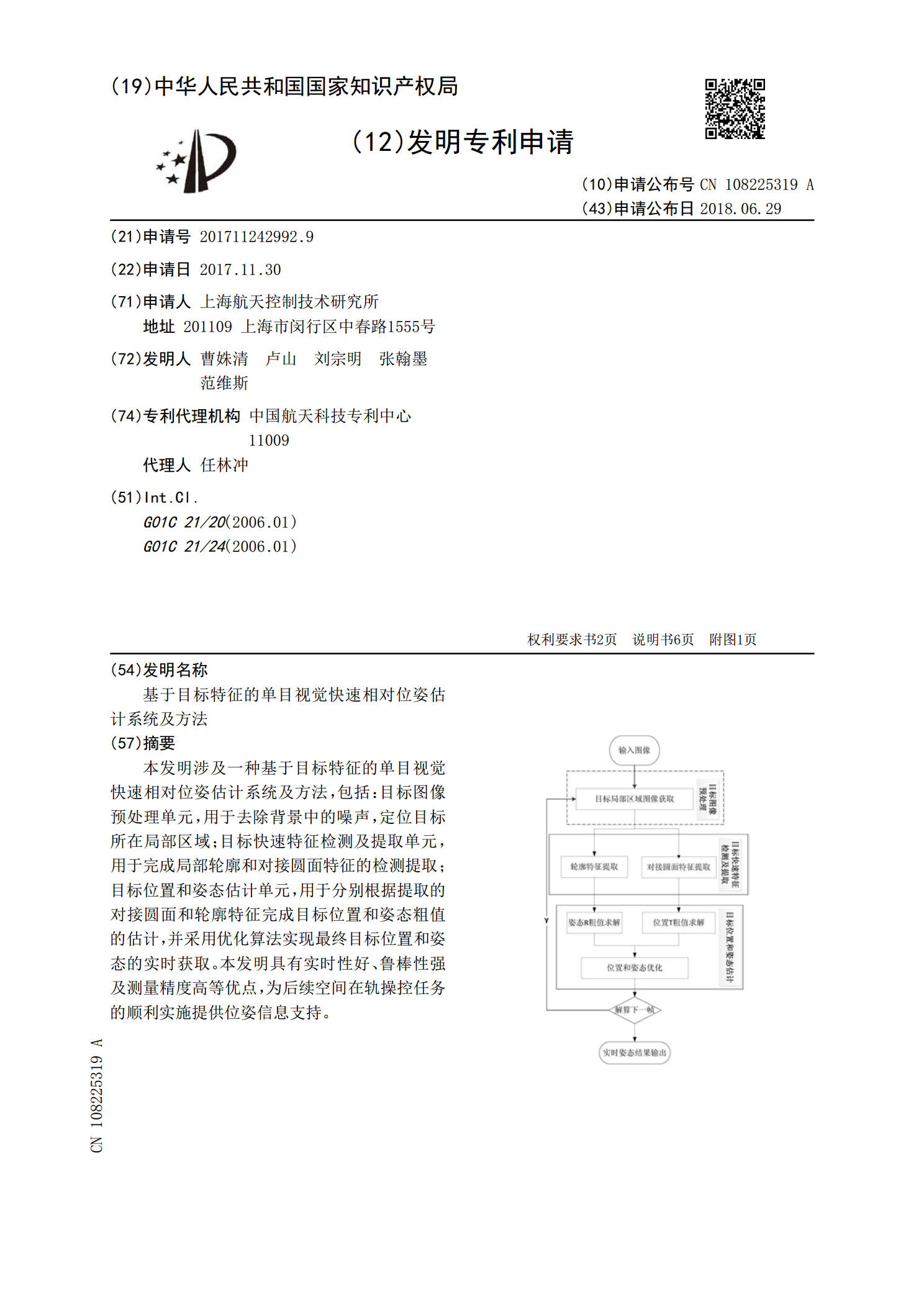
本发明涉及一种基于目标特征的单目视觉快速相对位姿估计系统及方法,包括:目标图像预处理单元,用于去除背景中的噪声,定位目标所在局部区域;目标快速特征检测及提取单元,用于完成局部轮廓和对接圆面特征的检测提取;目标位置和姿态估计单元,用于分别根据提取的对接圆面和轮廓特征完成目标位置和姿态粗值的估计,并采用优化算法实现最终目标位置和姿态的实时获取。本发明具有实时性好、鲁棒性强及测量精度高等优点,为后续空间在轨操控任务的顺利实施提供位姿信息支持。

移动机器人的位姿估计方法.pdf
本发明揭示了一种移动机器人的位姿估计方法,所示移动机器人包括全景摄像头,其特征在于,包括以下步骤:S1:初始化或获取移动机器人在参考位置的位姿信息及全景图像P

基于单目位姿估计的拉力扭转形变测量方法研究.docx
基于单目位姿估计的拉力扭转形变测量方法研究基于单目位姿估计的拉力扭转形变测量方法研究引言:在工程领域中,拉力扭转形变的测量对于确保结构的稳定性和工程安全性具有重要意义。传统的拉力扭转形变测量方法通常依赖于使用传感器和测量仪器,但这种方法并不一定适用于所有情况,特别是在对于复杂结构或不便于使用传感器的环境下。因此,本文研究了基于单目位姿估计的拉力扭转形变测量方法,以提供一种更灵活和便捷的测量解决方案。1.文献综述:近年来,机器视觉和计算机图像处理的发展为基于单目位姿估计的测量方法提供了坚实的基础。许多研究者