
三维复杂场景路径规划仿真系统设计与分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

三维复杂场景路径规划仿真系统设计与分析.docx
三维复杂场景路径规划仿真系统设计与分析三维复杂场景路径规划仿真系统设计与分析摘要:路径规划在现代自动化、机器人、计算机视觉、车辆控制等领域中得到了广泛的应用,在现代工业中具有非常重要的作用。针对三维复杂场景的路径规划问题,本文提出了一种基于仿真系统的路径规划方法。该方法将三维复杂场景建模为虚拟环境,并利用其仿真功能进行路径规划,仿真结果可更直观地反映实际情况,有效提高了路径规划的准确性和可靠性。本文详细介绍了基于Unity3D游戏引擎的仿真系统设计和实现,以及规划算法的设计原理。仿真实验结果表明,所提出的

人员疏散仿真系统三维场景的设计与实现.docx
人员疏散仿真系统三维场景的设计与实现人员疏散仿真系统三维场景的设计与实现摘要:人员疏散是重要的安全问题,尤其是在火灾、地震等紧急情况下。为了提高人员疏散效率和减少伤亡,利用计算机仿真技术进行人员疏散仿真具有重要意义。本论文设计与实现了一个人员疏散仿真系统的三维场景,通过建立合理的场景模型和仿真算法,实现了人员疏散仿真的可视化和交互功能。该系统能够对人员疏散时的行为和策略进行模拟和分析,为疏散方案的制定提供参考。实验结果表明,该系统能够有效地模拟人员疏散过程,对优化人员疏散方案具有一定的指导意义。关键词:人

网络路径的仿真系统设计与分析.docx
网络路径的仿真系统设计与分析网络路径的仿真系统设计与分析随着信息技术的发展,网络已成为人们最广泛使用的通讯工具,网络路径作为网络中的重要元素之一,对网络的研究和优化具有至关重要的作用。为了更好地研究网络路径,设计出网络路径的仿真系统,能够帮助我们更深入地理解网络各种传输机制,更好地分析网络路由优化和拓扑结构的影响。本文将讨论网络路径的仿真系统设计与分析。一、网络路径的定义和特性网络路径是指一个网络中连接源节点和目的节点的一条路线。这条路线通常会经过多个中间节点,称为中转节点。网络路径的长度是指从源节点到目
激光三维动态场景仿真系统.pdf
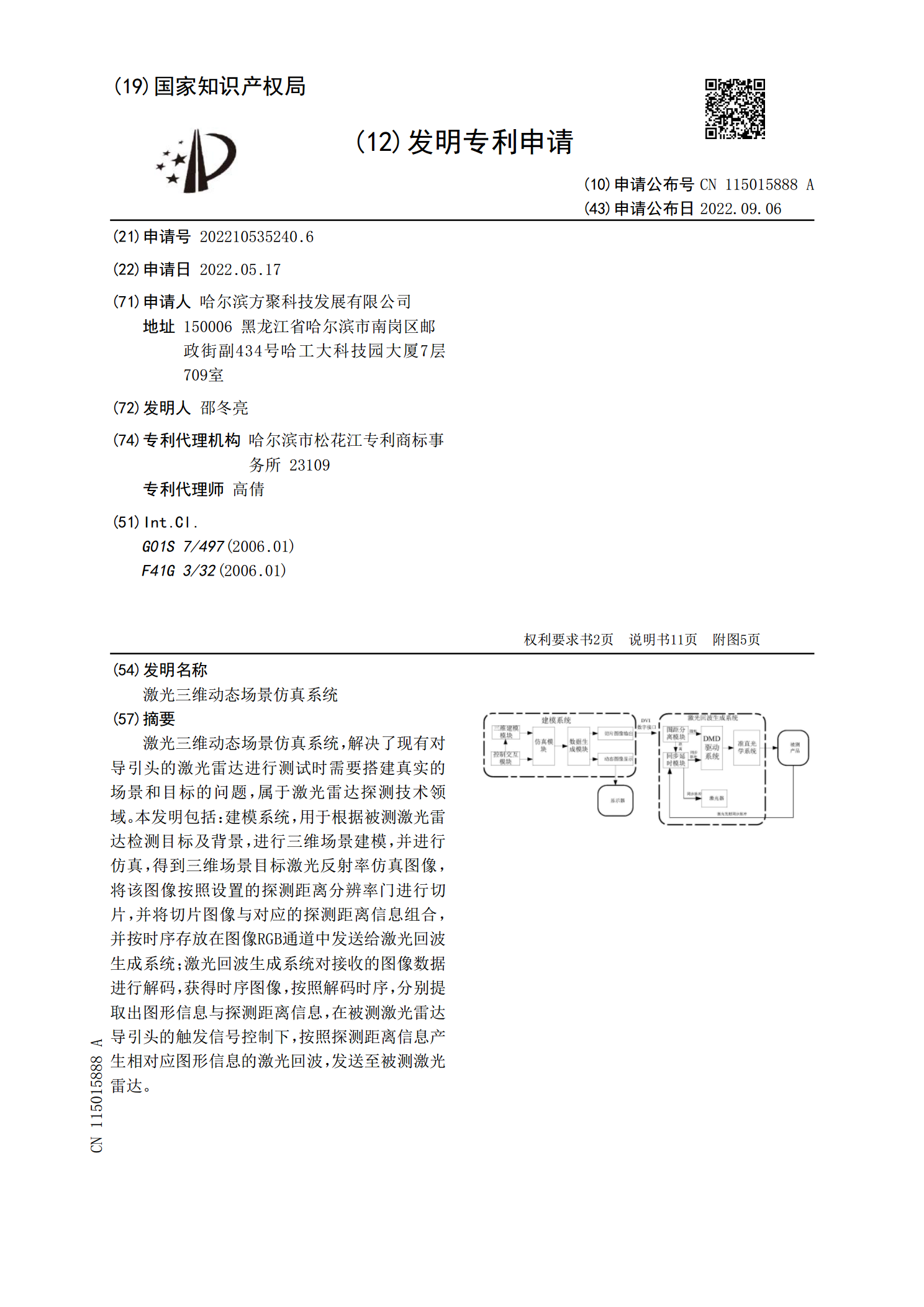
激光三维动态场景仿真系统,解决了现有对导引头的激光雷达进行测试时需要搭建真实的场景和目标的问题,属于激光雷达探测技术领域。本发明包括:建模系统,用于根据被测激光雷达检测目标及背景,进行三维场景建模,并进行仿真,得到三维场景目标激光反射率仿真图像,将该图像按照设置的探测距离分辨率门进行切片,并将切片图像与对应的探测距离信息组合,并按时序存放在图像RGB通道中发送给激光回波生成系统;激光回波生成系统对接收的图像数据进行解码,获得时序图像,按照解码时序,分别提取出图形信息与探测距离信息,在被测激光雷达导引头的触

面向手持终端的复杂三维场景远程渲染系统设计与实现.docx
面向手持终端的复杂三维场景远程渲染系统设计与实现面向手持终端的复杂三维场景远程渲染系统设计与实现随着移动设备和网络技术的发展,越来越多的人开始使用手机和平板电脑进行三维场景的浏览和交互。然而,这些设备通常无法处理复杂的三维场景,如高分辨率、大规模、细节丰富的建筑、城市、风景等。同时,这些设备的渲染能力和存储容量有限,不能完全实现实时渲染和高质量的渲染效果。因此,如何在手持终端上实现复杂三维场景的远程渲染成为了一个重要的课题。远程渲染系统可以将复杂的三维模型和渲染任务分布到服务器端,通过网络传输渲染结果到客