
激光三维动态场景仿真系统.pdf

灵波****ng

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光三维动态场景仿真系统.pdf
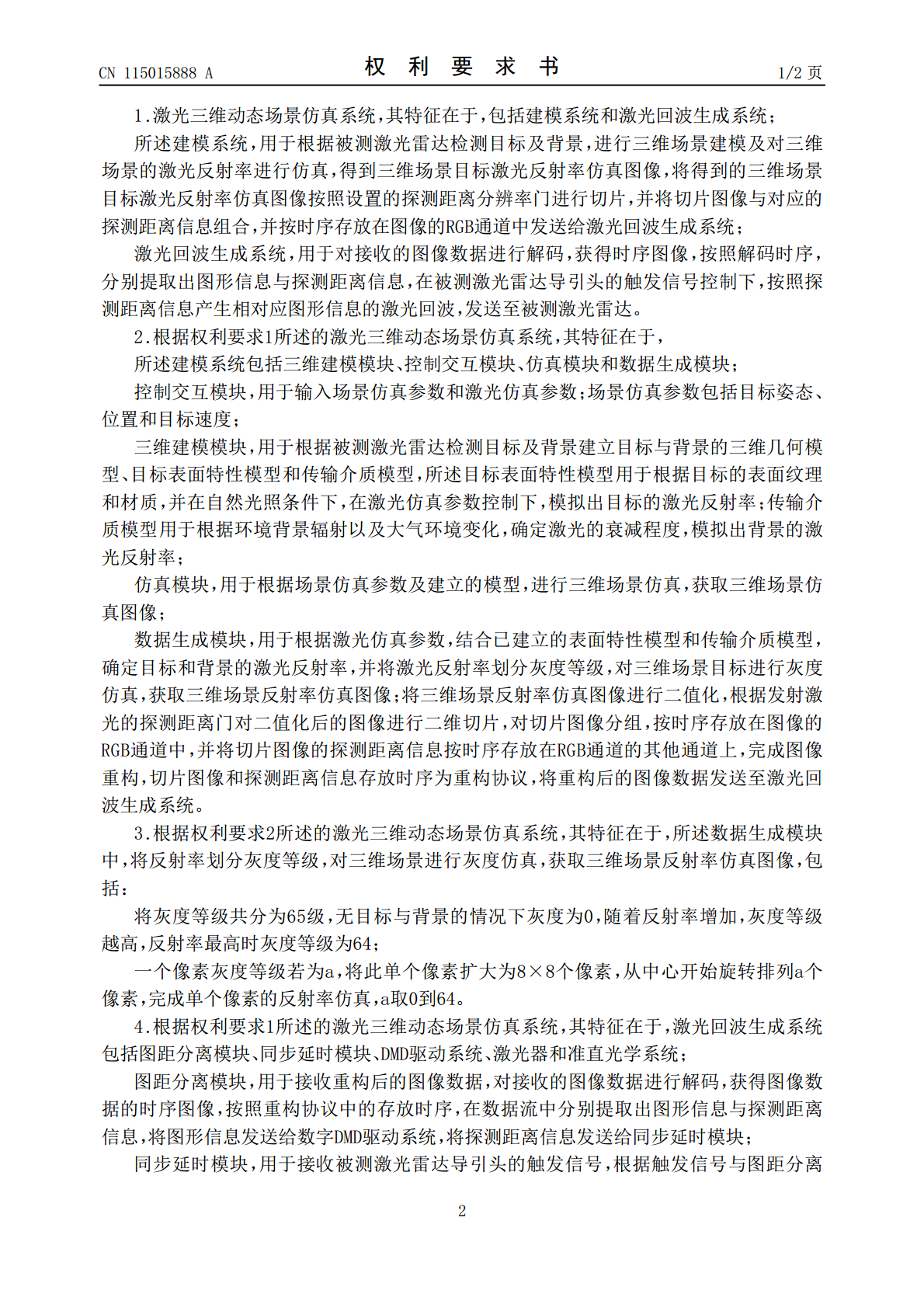
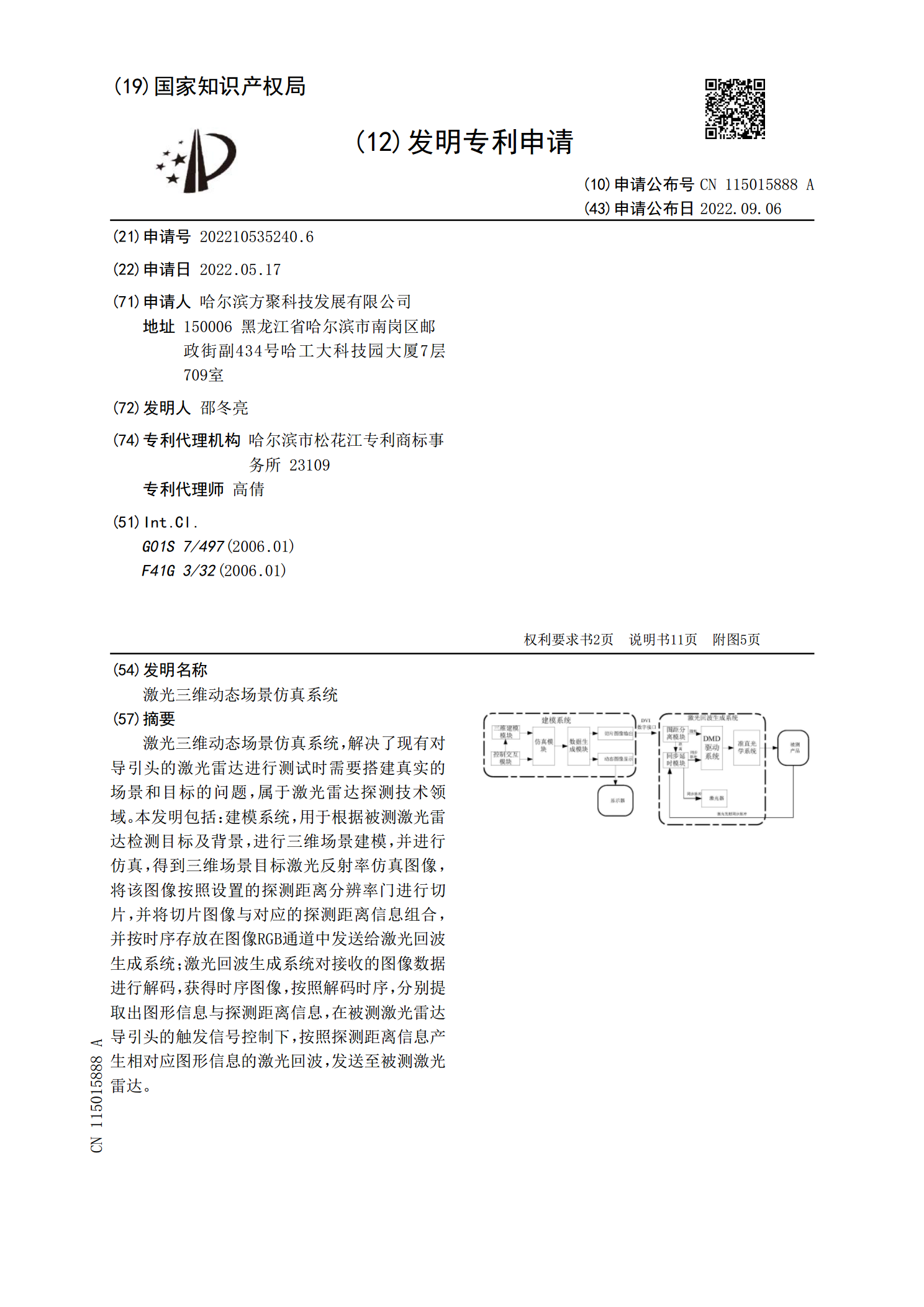
激光三维动态场景仿真系统,解决了现有对导引头的激光雷达进行测试时需要搭建真实的场景和目标的问题,属于激光雷达探测技术领域。本发明包括:建模系统,用于根据被测激光雷达检测目标及背景,进行三维场景建模,并进行仿真,得到三维场景目标激光反射率仿真图像,将该图像按照设置的探测距离分辨率门进行切片,并将切片图像与对应的探测距离信息组合,并按时序存放在图像RGB通道中发送给激光回波生成系统;激光回波生成系统对接收的图像数据进行解码,获得时序图像,按照解码时序,分别提取出图形信息与探测距离信息,在被测激光雷达导引头的触

基于Virtools技术的钻井三维场景动态仿真.docx
基于Virtools技术的钻井三维场景动态仿真在石油工业中,钻井是一个重要的工序,在钻井中,需要对具体的岩石层进行探测,并实现钻孔钻穿,这个过程是比较漫长和复杂的。因此,“基于Virtools技术的钻井三维场景动态仿真”研究就变得尤为重要了,本文将对该技术的相关内容进行详细介绍。一、Virtools技术简介Virtools技术是一种用于虚拟现实的软件平台,广泛使用于电子游戏、演出、应用程序等领域。该技术基于预定方法,并采用了基于C++编写的封装层,支持三维建模、物理模拟等,适用于多种平台。二、钻井三维场景

基于分形的三维动态自然场景仿真.docx
基于分形的三维动态自然场景仿真随着计算机技术和数据处理技术的发展,三维动态自然场景仿真技术越来越成熟,其应用领域逐渐扩展。其中基于分形的三维动态自然场景仿真技术是一种较为先进的技术,在虚拟现实、建筑设计、游戏等领域有着广泛的应用。本文将从分形的基础概念入手,深入探讨基于分形的三维动态自然场景仿真技术的实现方法以及应用场景。一、分形的基础概念分形最初是由著名的数学家曼德勃罗于1975年提出的,其基础概念是指存在于自然界中的各种复杂的图形,而这些图形呈现出的自相似特征是分形的关键特征之一。换言之,即是由较小的

人员疏散仿真系统三维场景的设计与实现.docx
人员疏散仿真系统三维场景的设计与实现人员疏散仿真系统三维场景的设计与实现摘要:人员疏散是重要的安全问题,尤其是在火灾、地震等紧急情况下。为了提高人员疏散效率和减少伤亡,利用计算机仿真技术进行人员疏散仿真具有重要意义。本论文设计与实现了一个人员疏散仿真系统的三维场景,通过建立合理的场景模型和仿真算法,实现了人员疏散仿真的可视化和交互功能。该系统能够对人员疏散时的行为和策略进行模拟和分析,为疏散方案的制定提供参考。实验结果表明,该系统能够有效地模拟人员疏散过程,对优化人员疏散方案具有一定的指导意义。关键词:人

三维复杂场景路径规划仿真系统设计与分析.docx
三维复杂场景路径规划仿真系统设计与分析三维复杂场景路径规划仿真系统设计与分析摘要:路径规划在现代自动化、机器人、计算机视觉、车辆控制等领域中得到了广泛的应用,在现代工业中具有非常重要的作用。针对三维复杂场景的路径规划问题,本文提出了一种基于仿真系统的路径规划方法。该方法将三维复杂场景建模为虚拟环境,并利用其仿真功能进行路径规划,仿真结果可更直观地反映实际情况,有效提高了路径规划的准确性和可靠性。本文详细介绍了基于Unity3D游戏引擎的仿真系统设计和实现,以及规划算法的设计原理。仿真实验结果表明,所提出的