
一种基于直线电机驱动的轻型手部外骨骼.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于直线电机驱动的轻型手部外骨骼.docx
一种基于直线电机驱动的轻型手部外骨骼基于直线电机驱动的轻型手部外骨骼摘要:外骨骼技术在康复领域具有广泛应用前景,其能够帮助行动受限人群恢复肌肉力量和运动功能。本论文提出了一种基于直线电机驱动的轻型手部外骨骼设计,旨在提供一种有效的手部功能恢复方案。通过对电机选型、驱动机构设计、控制算法和力反馈系统等方面的研究,实现了手部外骨骼的灵活性、适应性和可控性。实验结果表明,该外骨骼能够实现精确的手部运动模拟,并具备良好的力反馈特性,为手部康复提供了一种可行的解决方案。关键词:外骨骼,直线电机,手部康复,力反馈1.
一种混合驱动式手部康复用外骨骼装置.pdf
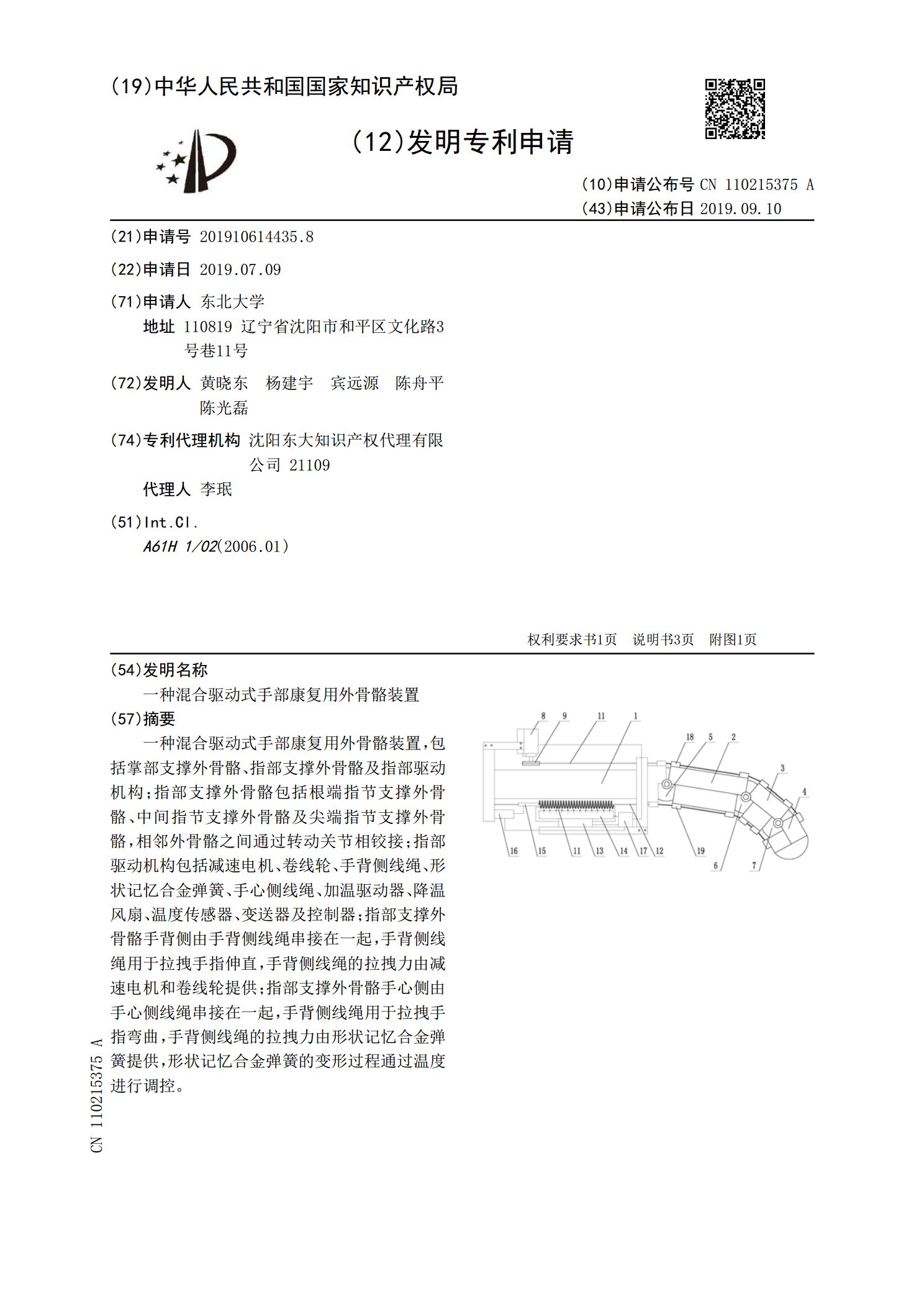
一种混合驱动式手部康复用外骨骼装置,包括掌部支撑外骨骼、指部支撑外骨骼及指部驱动机构;指部支撑外骨骼包括根端指节支撑外骨骼、中间指节支撑外骨骼及尖端指节支撑外骨骼,相邻外骨骼之间通过转动关节相铰接;指部驱动机构包括减速电机、卷线轮、手背侧线绳、形状记忆合金弹簧、手心侧线绳、加温驱动器、降温风扇、温度传感器、变送器及控制器;指部支撑外骨骼手背侧由手背侧线绳串接在一起,手背侧线绳用于拉拽手指伸直,手背侧线绳的拉拽力由减速电机和卷线轮提供;指部支撑外骨骼手心侧由手心侧线绳串接在一起,手背侧线绳用于拉拽手指弯曲,

一种直线电机驱动电梯.pdf
本发明公开了一种直线电机驱动电梯,包括导轨、轿厢和直线驱动电机,所述轿厢可滑动地设置在导轨上,所述直线驱动电机固定在导轨上,所述直线驱动电机的动子部分与轿厢连接以通过直线驱动电机驱动轿厢在导轨上滑动。本发明的直线电机驱动电梯采用直线驱动电机直接驱动,结构简单。通过设置第一滚轮、第二滚轮和直线驱动电机的位置配合直接形成导向,并形成便于直线驱动电机驱动的结构。
一种基于SEA模块的康复用手部外骨骼装置.pdf
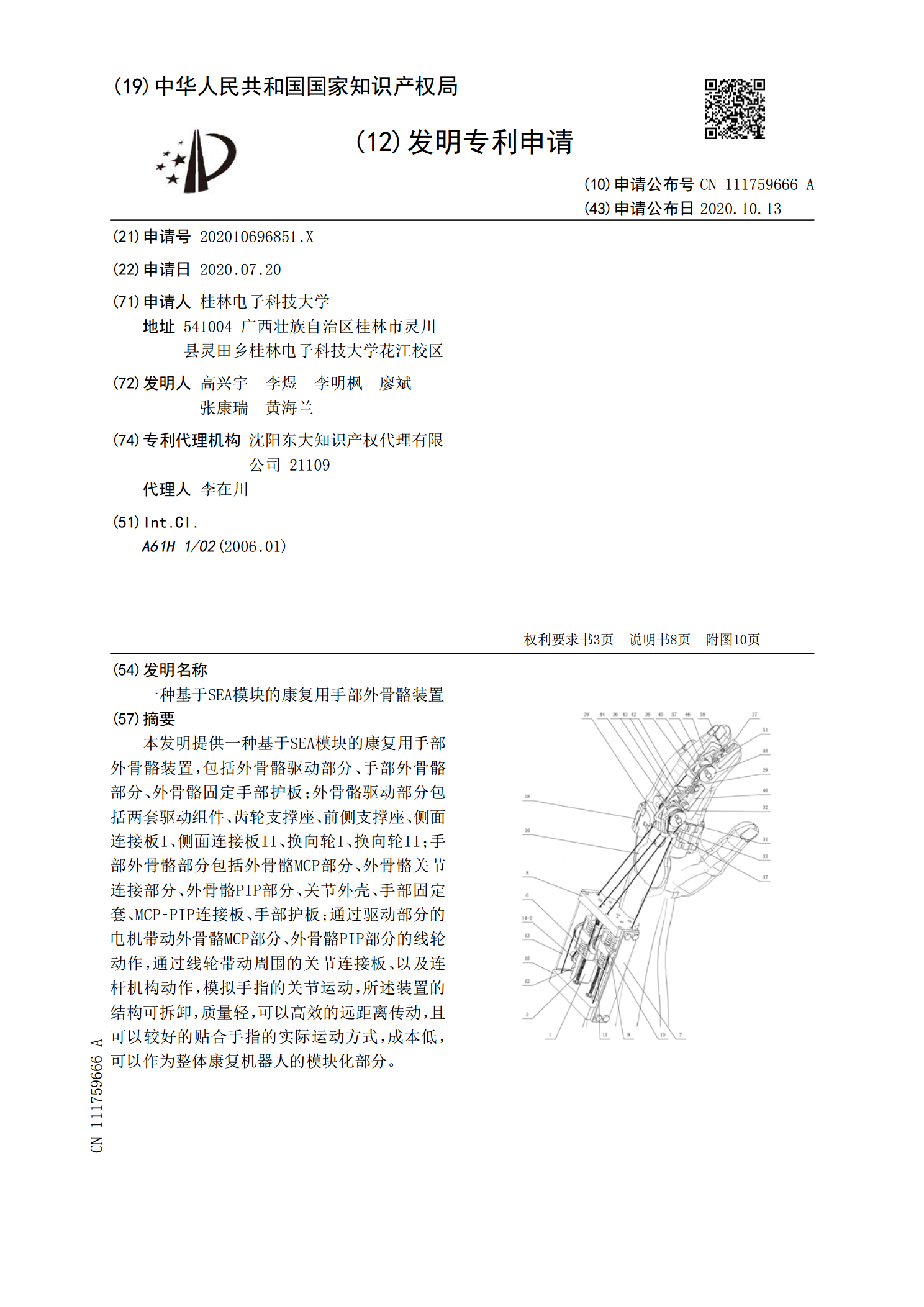
本发明提供一种基于SEA模块的康复用手部外骨骼装置,包括外骨骼驱动部分、手部外骨骼部分、外骨骼固定手部护板;外骨骼驱动部分包括两套驱动组件、齿轮支撑座、前侧支撑座、侧面连接板I、侧面连接板II、换向轮I、换向轮II;手部外骨骼部分包括外骨骼MCP部分、外骨骼关节连接部分、外骨骼PIP部分、关节外壳、手部固定套、MCP‑PIP连接板、手部护板;通过驱动部分的电机带动外骨骼MCP部分、外骨骼PIP部分的线轮动作,通过线轮带动周围的关节连接板、以及连杆机构动作,模拟手指的关节运动,所述装置的结构可拆卸,质量轻,
一种电机驱动的髋膝外骨骼联动装置.pdf
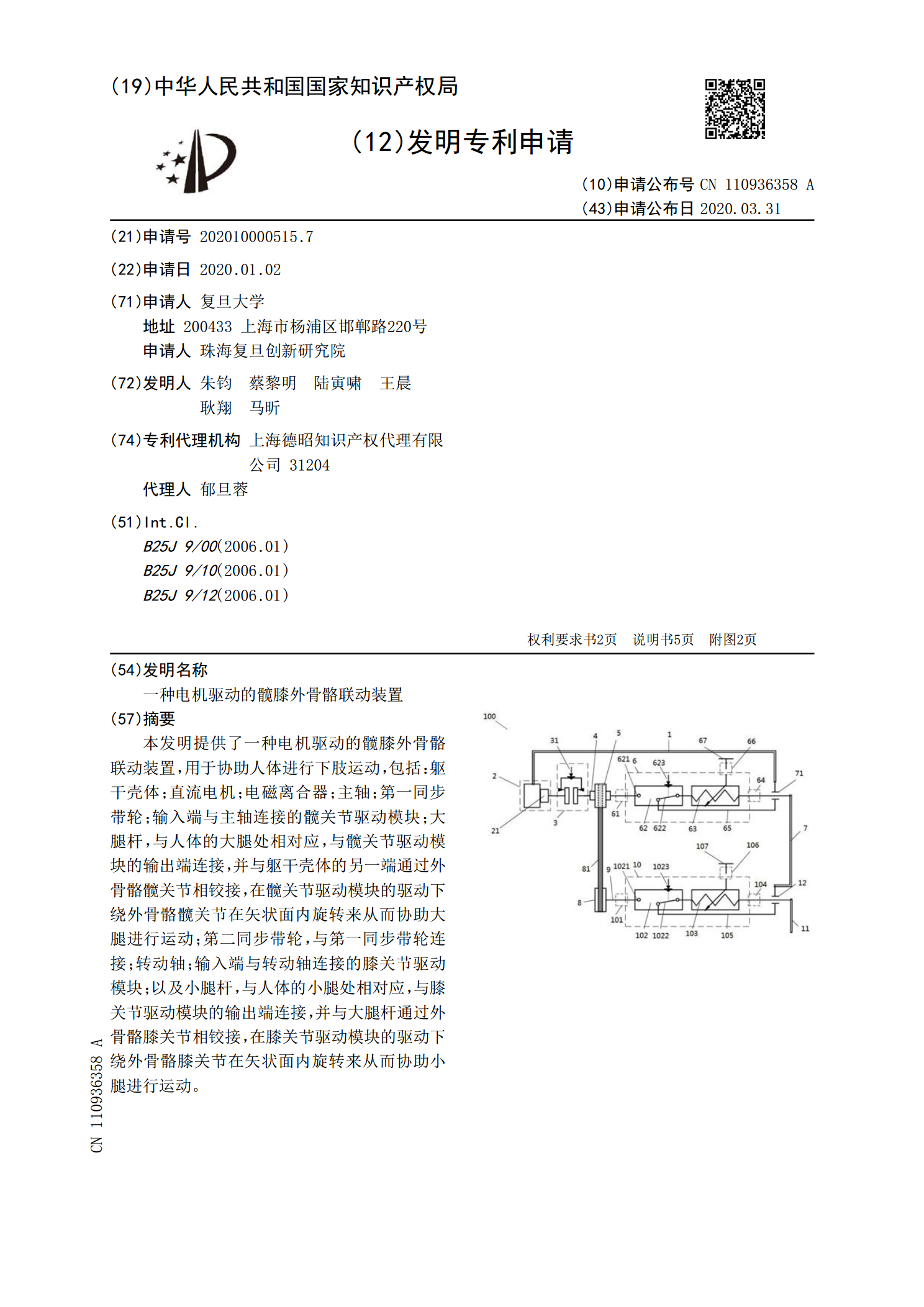
本发明提供了一种电机驱动的髋膝外骨骼联动装置,用于协助人体进行下肢运动,包括:躯干壳体;直流电机;电磁离合器;主轴;第一同步带轮;输入端与主轴连接的髋关节驱动模块;大腿杆,与人体的大腿处相对应,与髋关节驱动模块的输出端连接,并与躯干壳体的另一端通过外骨骼髋关节相铰接,在髋关节驱动模块的驱动下绕外骨骼髋关节在矢状面内旋转来从而协助大腿进行运动;第二同步带轮,与第一同步带轮连接;转动轴;输入端与转动轴连接的膝关节驱动模块;以及小腿杆,与人体的小腿处相对应,与膝关节驱动模块的输出端连接,并与大腿杆通过外骨骼膝关