
一种基于VRFT的全格式无模型自适应控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于VRFT的全格式无模型自适应控制.docx
一种基于VRFT的全格式无模型自适应控制引言随着现代科技的发展,各种复杂的非线性控制系统不断涌现,这也对自适应控制算法的提出提出了更高的要求。与传统的控制算法相比,自适应控制算法可以更好地处理系统模型不准确、外部扰动及其它非线性因素等问题。因此,越来越多的研究者开始研究自适应控制算法,并在实际工程中得到了广泛的应用。自适应控制算法的优点是在于可以对被控制对象的模型不准确或不知道的情况下进行控制,同时实现控制器的在线自调整,以保证系统处于稳定状态下运行。将自适应控制算法与现有控制方法相结合,可以实现最佳控制
针对可测扰动的全格式无模型自适应扰动补偿控制方法.pdf
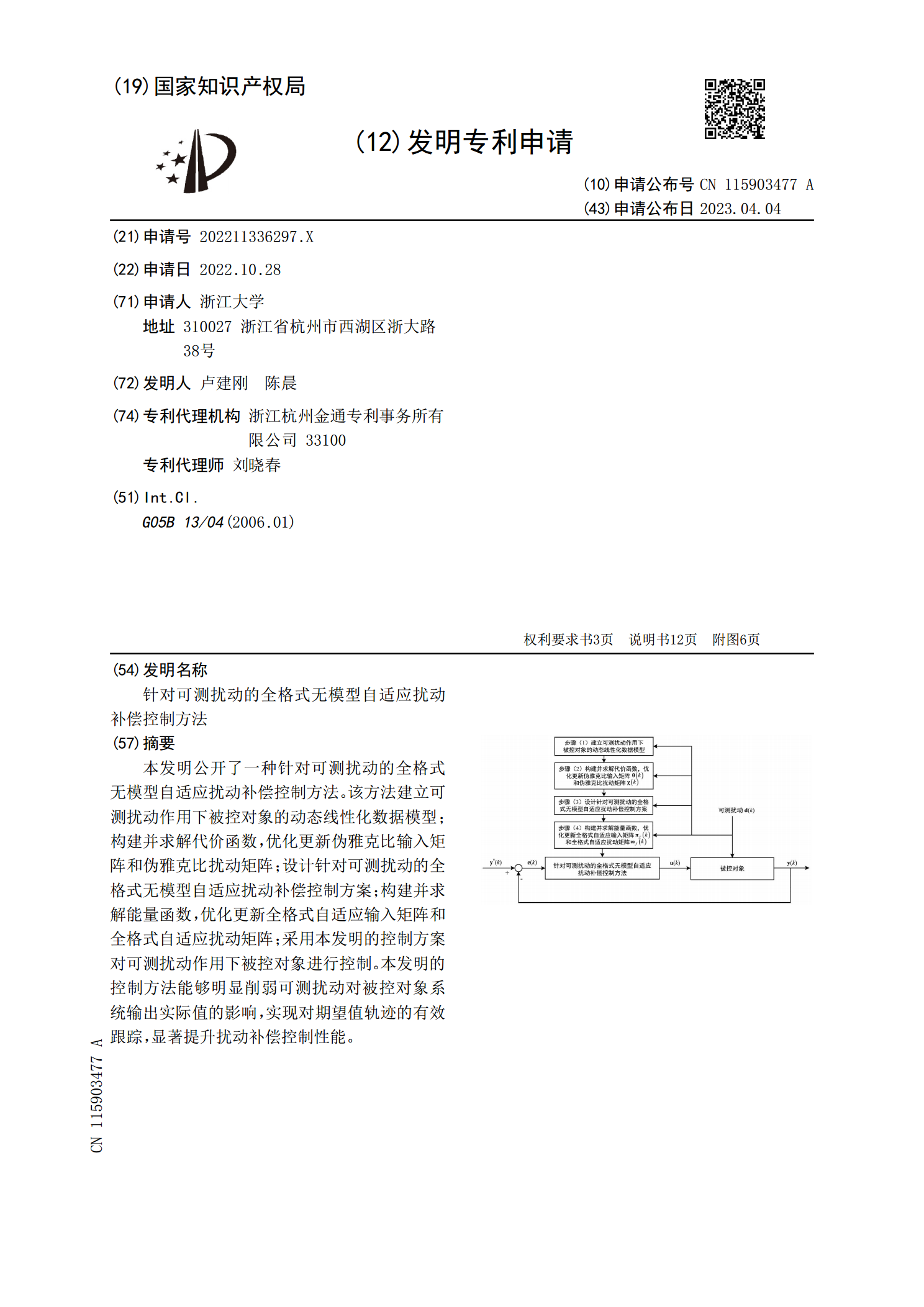
本发明公开了一种针对可测扰动的全格式无模型自适应扰动补偿控制方法。该方法建立可测扰动作用下被控对象的动态线性化数据模型;构建并求解代价函数,优化更新伪雅克比输入矩阵和伪雅克比扰动矩阵;设计针对可测扰动的全格式无模型自适应扰动补偿控制方案;构建并求解能量函数,优化更新全格式自适应输入矩阵和全格式自适应扰动矩阵;采用本发明的控制方案对可测扰动作用下被控对象进行控制。本发明的控制方法能够明显削弱可测扰动对被控对象系统输出实际值的影响,实现对期望值轨迹的有效跟踪,显著提升扰动补偿控制性能。
一种基于无模型自适应控制的次同步阻尼控制方法.pdf
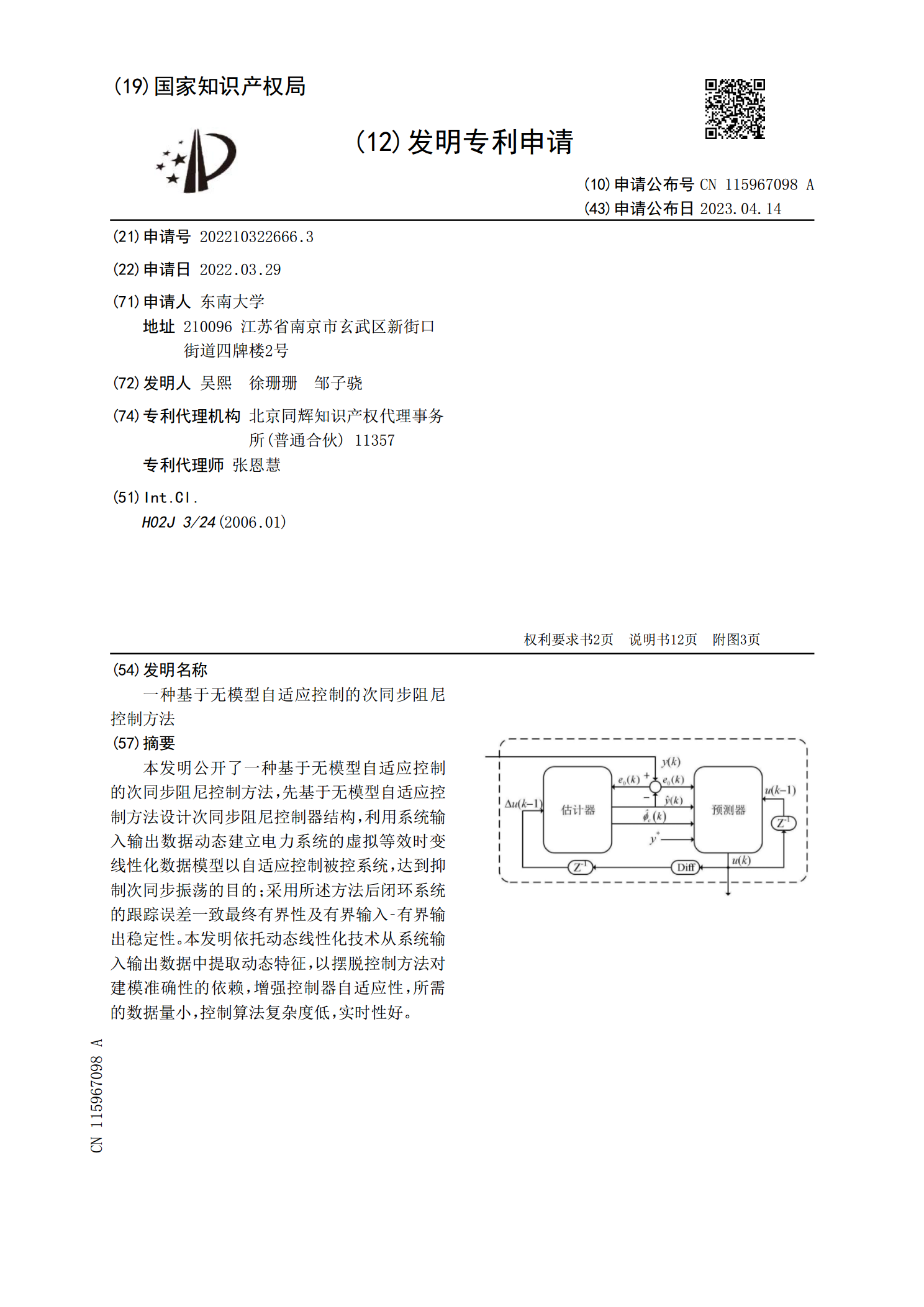
本发明公开了一种基于无模型自适应控制的次同步阻尼控制方法,先基于无模型自适应控制方法设计次同步阻尼控制器结构,利用系统输入输出数据动态建立电力系统的虚拟等效时变线性化数据模型以自适应控制被控系统,达到抑制次同步振荡的目的;采用所述方法后闭环系统的跟踪误差一致最终有界性及有界输入‑有界输出稳定性。本发明依托动态线性化技术从系统输入输出数据中提取动态特征,以摆脱控制方法对建模准确性的依赖,增强控制器自适应性,所需的数据量小,控制算法复杂度低,实时性好。
针对不可测扰动的全格式无模型自适应扰动补偿控制方法.pdf
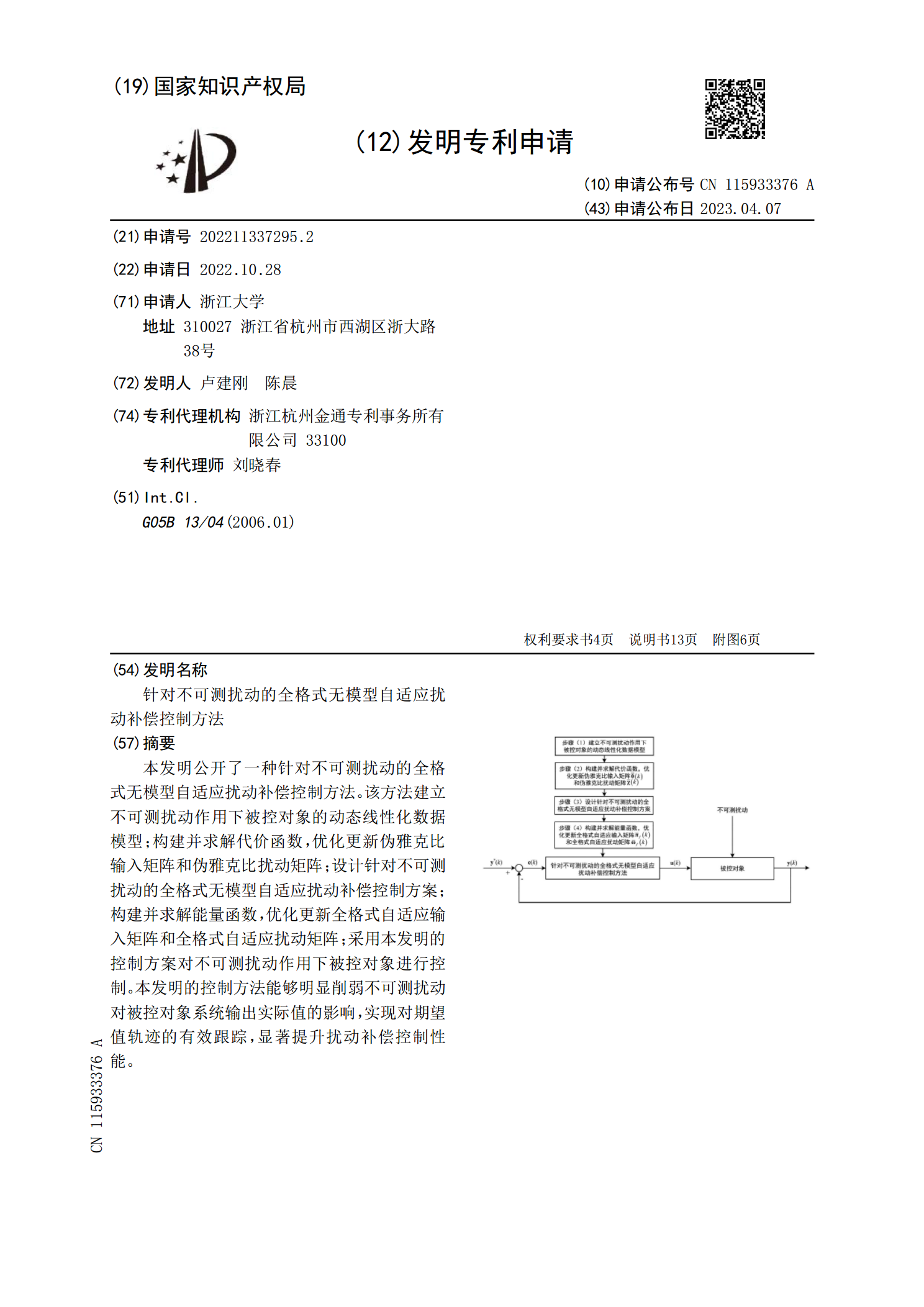
本发明公开了一种针对不可测扰动的全格式无模型自适应扰动补偿控制方法。该方法建立不可测扰动作用下被控对象的动态线性化数据模型;构建并求解代价函数,优化更新伪雅克比输入矩阵和伪雅克比扰动矩阵;设计针对不可测扰动的全格式无模型自适应扰动补偿控制方案;构建并求解能量函数,优化更新全格式自适应输入矩阵和全格式自适应扰动矩阵;采用本发明的控制方案对不可测扰动作用下被控对象进行控制。本发明的控制方法能够明显削弱不可测扰动对被控对象系统输出实际值的影响,实现对期望值轨迹的有效跟踪,显著提升扰动补偿控制性能。

基于无模型自适应控制的锌层厚度预估模型.docx
基于无模型自适应控制的锌层厚度预估模型基于无模型自适应控制的锌层厚度预估模型摘要锌层厚度是在工业制造过程中常常需要进行预估和控制的一个重要参数。目前,传统的模型预测控制方法往往需要依赖于建立精确的数学模型,但在实际应用中,由于加工参数的变化和不确定性,模型的建立和参数的调整都面临困难。本文提出了一种基于无模型自适应控制的锌层厚度预估模型,该方法通过采集和分析实时的过程数据,并自适应地调整控制策略,实现较准确地锌层厚度预估和控制。关键词:无模型自适应控制;锌层厚度;过程数据;控制策略引言在工业制造过程中,锌