
一种基于无模型自适应控制的次同步阻尼控制方法.pdf

猫巷****提格

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于无模型自适应控制的次同步阻尼控制方法.pdf
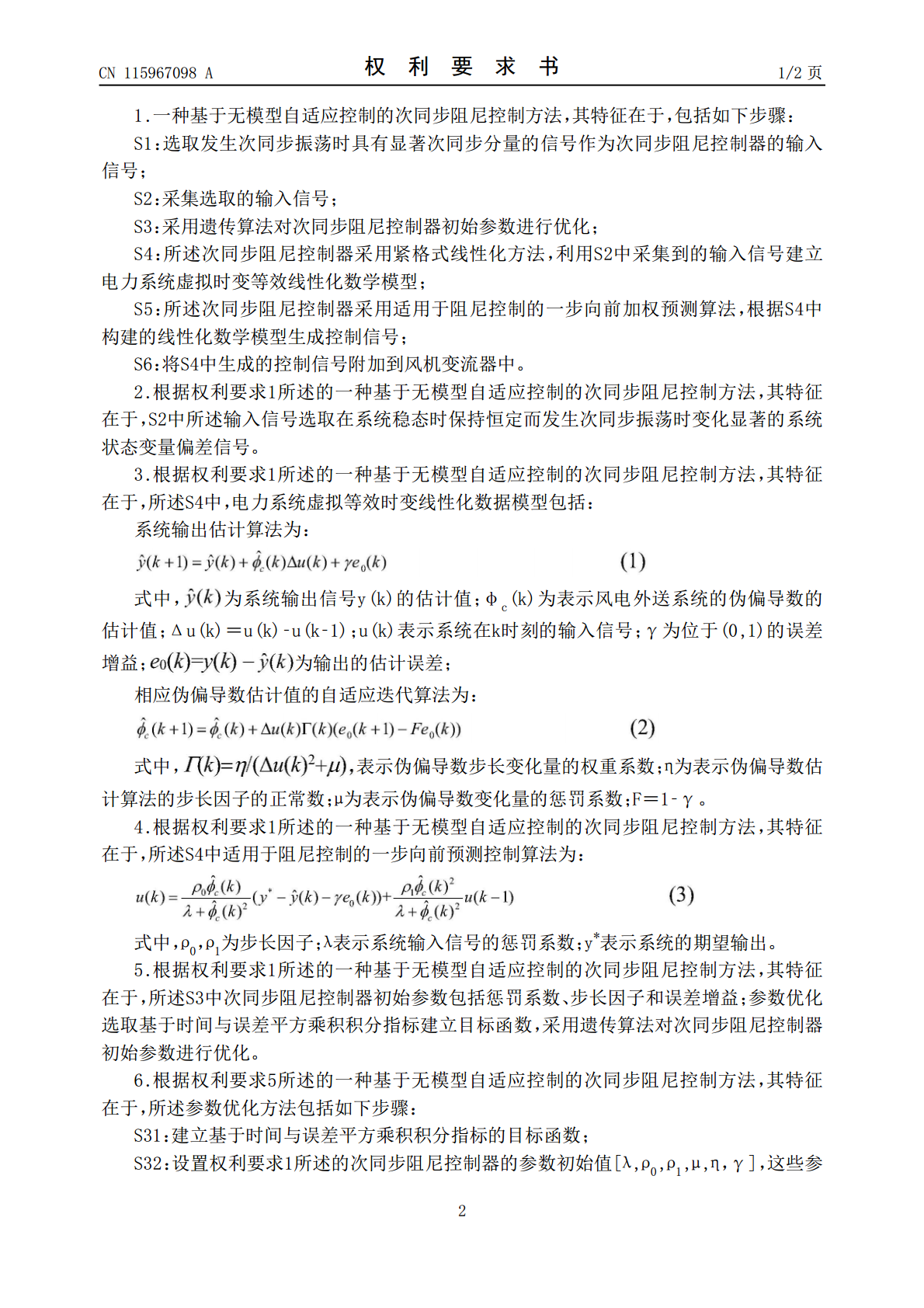
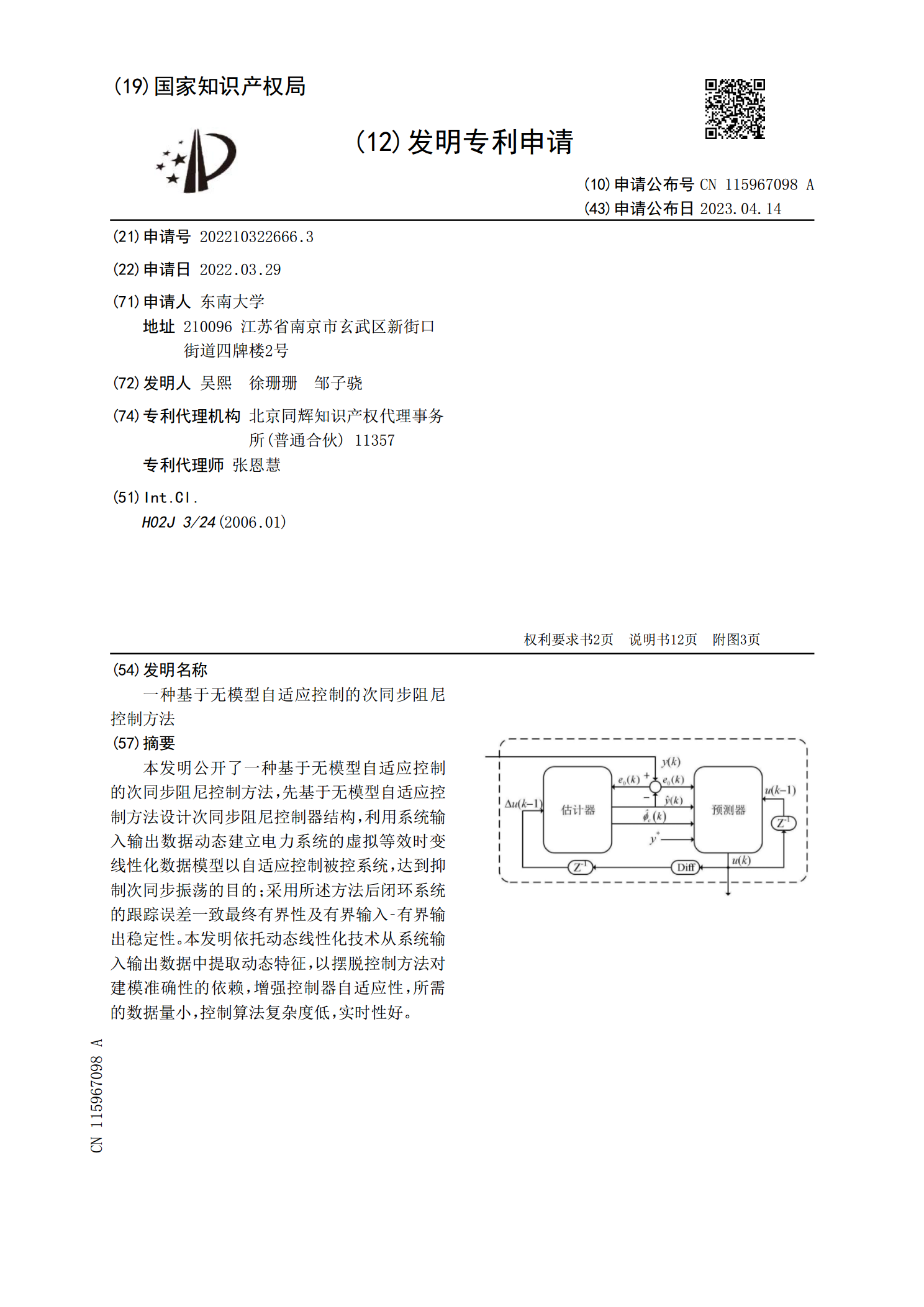
本发明公开了一种基于无模型自适应控制的次同步阻尼控制方法,先基于无模型自适应控制方法设计次同步阻尼控制器结构,利用系统输入输出数据动态建立电力系统的虚拟等效时变线性化数据模型以自适应控制被控系统,达到抑制次同步振荡的目的;采用所述方法后闭环系统的跟踪误差一致最终有界性及有界输入‑有界输出稳定性。本发明依托动态线性化技术从系统输入输出数据中提取动态特征,以摆脱控制方法对建模准确性的依赖,增强控制器自适应性,所需的数据量小,控制算法复杂度低,实时性好。

无模型自适应广域阻尼控制设计方法.docx
无模型自适应广域阻尼控制设计方法无模型自适应广域阻尼控制设计方法随着电力系统规模的不断扩大和复杂性不断增加,电力系统的稳定性控制问题成为电力系统研究的热点。电力系统中的机电振荡和电磁振荡是导致系统失稳的主要因素之一。在实际运行中,由于各种因素的影响,电力系统的阻尼常数会发生变化,从而影响系统的稳定性和动态响应。为了提高电力系统的稳定性和动态性能,需要采取有效的阻尼控制方法。在电力系统阻尼控制方法中,广域阻尼控制具有重要的作用。传统方法采用数学模型来设计阻尼控制器,但是由于电力系统本身的非线性、不确定性和动

基于改进无模型自适应控制算法的发电机广域阻尼控制器设计.docx
基于改进无模型自适应控制算法的发电机广域阻尼控制器设计基于改进无模型自适应控制算法的发电机广域阻尼控制器设计摘要:发电机是电力系统的重要组成部分,其稳定运行对维持电网的安全稳定至关重要。广域阻尼控制器是一种有效的控制手段,可以通过调节发电机励磁,提供阻尼控制支持,改善系统升势特性。本文基于改进无模型自适应控制算法,设计了一种基于发电机的广域阻尼控制器,通过仿真验证了该控制器的有效性。关键词:发电机;广域阻尼控制器;自适应控制无模型控制1.引言电力系统是现代工业文明的基石,电力的稳定供应对社会经济发展至关重

基于神经网络的无模型自适应控制方法的研究.docx
基于神经网络的无模型自适应控制方法的研究基于神经网络的无模型自适应控制方法的研究摘要:近年来,随着神经网络技术的发展和应用范围的扩大,基于神经网络的控制方法逐渐受到广泛关注。本文主要研究基于神经网络的无模型自适应控制方法,该方法不依赖先验的系统模型,能够适应各种复杂的非线性系统。本文首先介绍了传统的模型和模型自适应控制方法的局限性,然后详细介绍了基于神经网络的无模型自适应控制方法的原理和优势。最后通过数值模拟实验验证了该方法的有效性。关键词:神经网络、无模型自适应控制、非线性系统1.引言传统的控制方法通常

基于SVC的次同步振荡抑制方法及阻尼控制研究.docx
基于SVC的次同步振荡抑制方法及阻尼控制研究基于SVC的次同步振荡抑制方法及阻尼控制研究摘要:次同步振荡(SSO)是电力系统中一种常见的振荡现象,其对系统的稳定性和可靠性造成严重影响。为了有效抑制SSO,本文提出了一种基于静止无功补偿器(SVC)的振荡抑制方法,并研究阻尼控制策略。首先,分析了SSO发生的原因和对系统的影响。然后,介绍了SVC的基本原理及其在电力系统中的应用。接着,提出了一种基于SVC的SSO抑制方法,该方法通过调节SVC的控制参数实现对振荡波动的抑制。最后,针对SVC的阻尼控制问题,设计