
铣刨表面的铣刨体积或铣刨面积的确定.pdf

沛芹****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

铣刨表面的铣刨体积或铣刨面积的确定.pdf
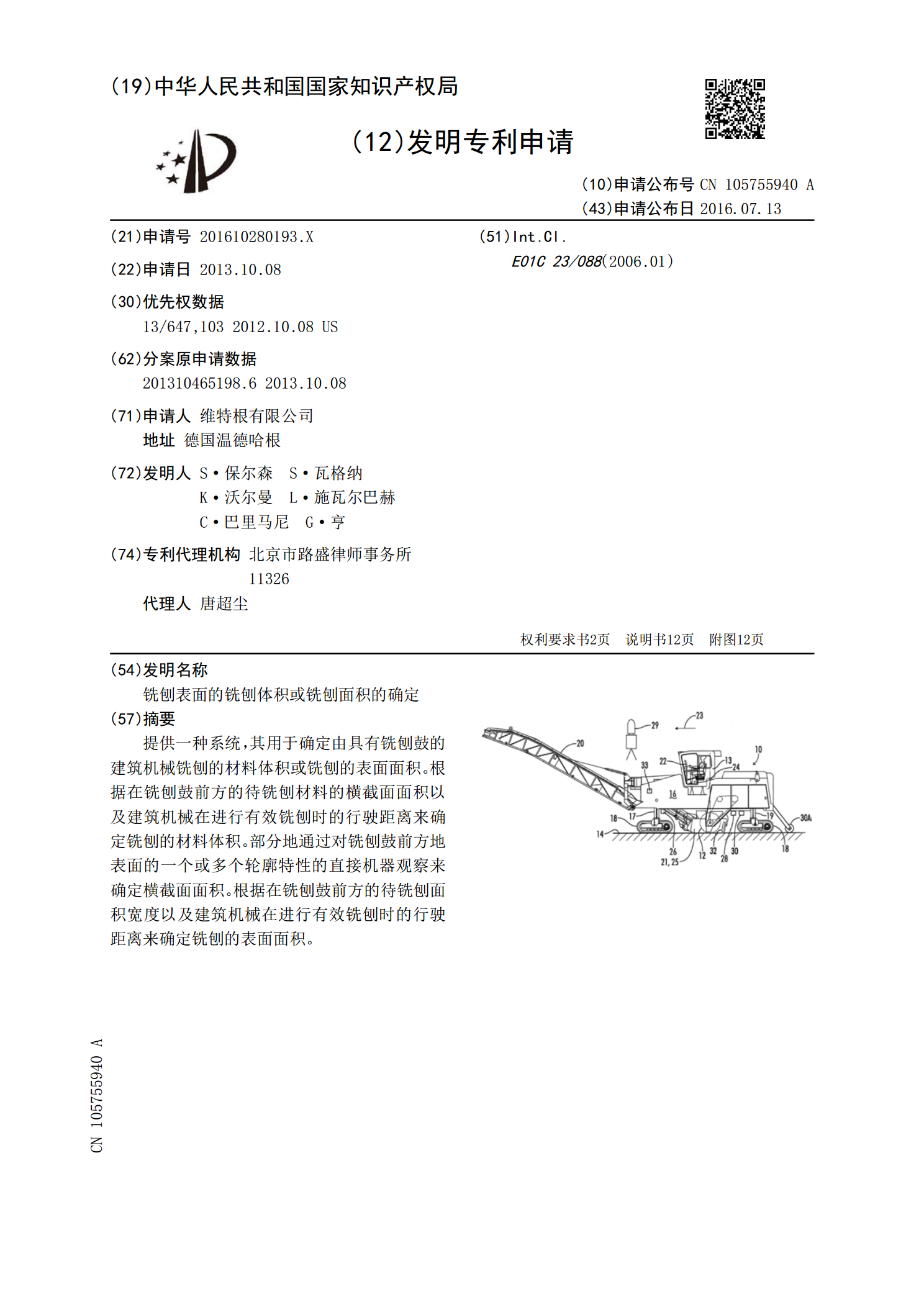
提供一种系统,其用于确定由具有铣刨鼓的建筑机械铣刨的材料体积或铣刨的表面面积。根据在铣刨鼓前方的待铣刨材料的横截面面积以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的材料体积。部分地通过对铣刨鼓前方地表面的一个或多个轮廓特性的直接机器观察来确定横截面面积。根据在铣刨鼓前方的待铣刨面积宽度以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的表面面积。
铣刨表面的铣刨体积或铣刨面积的确定.pdf
提供一种系统,其用于确定由具有铣刨鼓的建筑机械铣刨的材料体积或铣刨的表面面积。根据在铣刨鼓前方的待铣刨材料的横截面面积以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的材料体积。部分地通过对铣刨鼓前方地表面的一个或多个轮廓特性的直接机器观察来确定横截面面积。根据在铣刨鼓前方的待铣刨面积宽度以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的表面面积。

可快速改变铣刨宽度的铣刨轮.pdf
一种可快速改变铣刨宽度的铣刨轮,属于应用在路面铣刨机上的铣刨轮结构。该铣刨轮包括驱动内筒,铣刨外筒,在铣刨外筒表面布置有切削刀具;驱动内筒两端通过轴承或一端轴承另一端减速器支撑在车架上;铣刨外筒一端通过螺栓与驱动内筒连接,另一端通过小间隙配合支撑在铣刨内筒上。该铣刨轮有驱动内筒,铣刨外筒构成,驱动内筒套接在铣刨外筒内,改变铣刨宽度时,只需将驱动内筒、铣刨外筒之间的连接螺栓拆开,将铣刨外筒抽出,更换上所需要宽度的另外一种铣刨外筒,再将连接螺栓紧固好。优点:该铣刨轮结构简单,通过内、外筒的连接结构,实现了铣刨

铣刨劳务合同.doc
。-可编辑修改-路面铣刨合同甲方:内蒙古东昊水电路桥工程有限责任公司海拉尔项目部乙方:甲乙双方依照《中华人民共和国合同法》《中华人民共和国劳动法》及相关法律法规,遵循平等、自愿、公平和诚实信用的原则,经双方协商一致,订立本合同。第一条、工作名称、地点及内容工作名称:路面铣刨机械清扫工作地点:海拉尔区工作内容:铣刨机铣刨路面,清扫机清扫路面,包括水泥混凝土路面和沥青混凝土路面合同工期:自2017年7月9日起至路面铣刨完成第二条、承包方式1、此合同实行单价承包,河东旧路提升改造工程水泥混凝土路面铣刨及铣刨后的
铣刨劳务合同.doc
。-可编辑修改-路面铣刨合同甲方:内蒙古东昊水电路桥工程有限责任公司海拉尔项目部乙方:甲乙双方依照《中华人民共和国合同法》《中华人民共和国劳动法》及相关法律法规,遵循平等、自愿、公平和诚实信用的原则,经双方协商一致,订立本合同。第一条、工作名称、地点及内容工作名称:路面铣刨机械清扫工作地点:海拉尔区工作内容:铣刨机铣刨路面,清扫机清扫路面,包括水泥混凝土路面和沥青混凝土路面合同工期:自2017年7月9日起至路面铣刨完成第二条、承包方式1、此合同实行单价承包,河东旧路提升改造工程水泥混凝土路面铣刨及铣刨后的