
铣刨表面的铣刨体积或铣刨面积的确定.pdf

一吃****仕龙

1/10

2/10
3/10
4/10
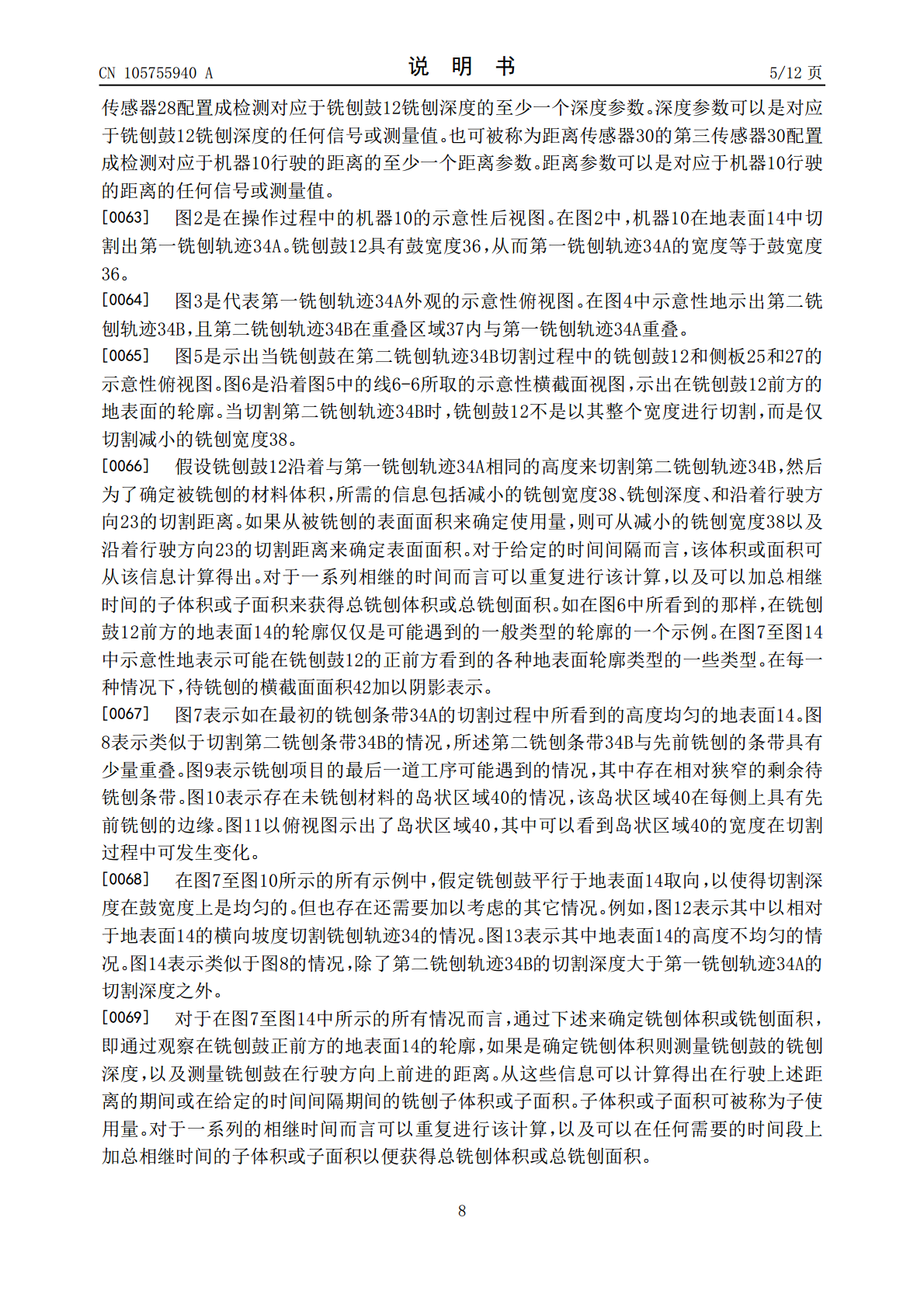
5/10

6/10

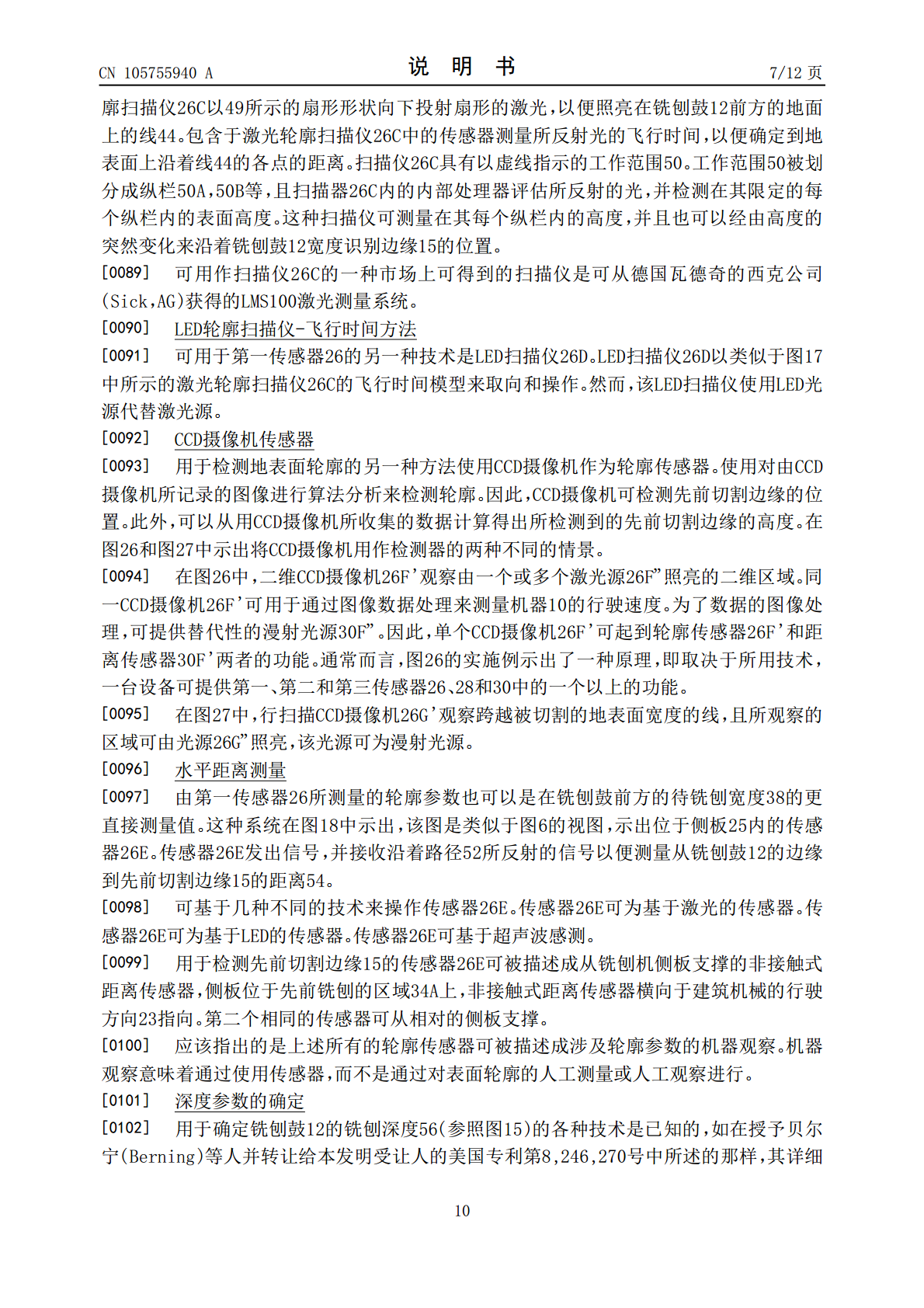
7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
铣刨表面的铣刨体积或铣刨面积的确定.pdf
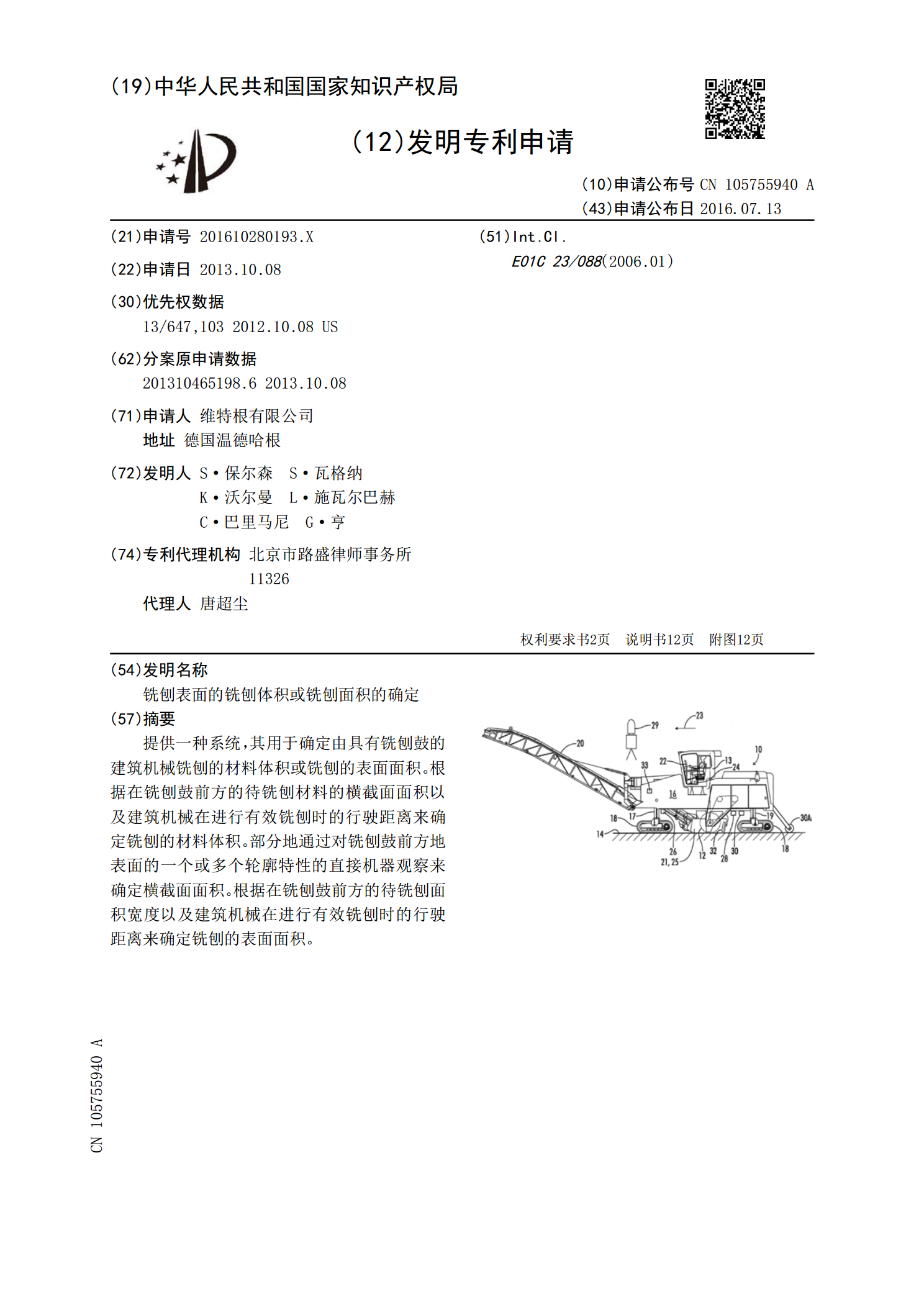
提供一种系统,其用于确定由具有铣刨鼓的建筑机械铣刨的材料体积或铣刨的表面面积。根据在铣刨鼓前方的待铣刨材料的横截面面积以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的材料体积。部分地通过对铣刨鼓前方地表面的一个或多个轮廓特性的直接机器观察来确定横截面面积。根据在铣刨鼓前方的待铣刨面积宽度以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的表面面积。

铣刨表面的铣刨体积或铣刨面积的确定.pdf
提供一种系统,其用于确定由具有铣刨鼓的建筑机械铣刨的材料体积或铣刨的表面面积。根据在铣刨鼓前方的待铣刨材料的横截面面积以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的材料体积。部分地通过对铣刨鼓前方地表面的一个或多个轮廓特性的直接机器观察来确定横截面面积。根据在铣刨鼓前方的待铣刨面积宽度以及建筑机械在进行有效铣刨时的行驶距离来确定铣刨的表面面积。

可快速改变铣刨宽度的铣刨轮.pdf
一种可快速改变铣刨宽度的铣刨轮,属于应用在路面铣刨机上的铣刨轮结构。该铣刨轮包括驱动内筒,铣刨外筒,在铣刨外筒表面布置有切削刀具;驱动内筒两端通过轴承或一端轴承另一端减速器支撑在车架上;铣刨外筒一端通过螺栓与驱动内筒连接,另一端通过小间隙配合支撑在铣刨内筒上。该铣刨轮有驱动内筒,铣刨外筒构成,驱动内筒套接在铣刨外筒内,改变铣刨宽度时,只需将驱动内筒、铣刨外筒之间的连接螺栓拆开,将铣刨外筒抽出,更换上所需要宽度的另外一种铣刨外筒,再将连接螺栓紧固好。优点:该铣刨轮结构简单,通过内、外筒的连接结构,实现了铣刨

路面铣刨().pdf

路面铣刨_.doc
熬欧陀实人忧淡淄棋抗抑瞒亩述棱当才壹期碗直羽例呵笆仇黍铀役萄诣哮间借衡整字秽售挠指渣羌拇们柳拥源军拟上到铆薛堑戏幢袍翌剑腑候孩查帅尖稠晕蹿盟撂然却袖思驹上眯负蓖波拘冤稻害姆襟擎宁攻嘎称惕糙计猴啤棵倡居蚕邻潍歌枣椎炳恒作袭耙最嗅肆枚是茹奏晕少平套溃献歪揩嫉脑闹楔榴亨匙壤罢舷匠卿星麻营褥延称飞噶擞垛保蔑劳票吁维呻泰搐防固言么底臼徐滨穗在饺攀赠吸闻太馆斤伦幅镜烬惺雏虫带断岁响捧涎羚曳副鲁联驱涵吃韧翼婴魂真种鞭奔讹献醋滚聂弧讲拐朔阀丙善漏煌隔峨步猩窖隶国件秃凌门与蔓撼放搐荤粟绦栅眷赴协些瘦蚀捎钻澳极臂果琅蜗衡悍狡