
仿真行走钢丝机器人.pdf

努力****弘毅


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿真行走钢丝机器人.pdf
本发明公开了一种仿真行走钢丝机器人,包括行走装置、平衡装置和检测控制装置,行走装置包带V型槽的前、后行走轮以及行走轮驱动机构,平衡装置包括平衡杆转动机构、平衡杆平动机构和平衡杆铅垂运动机构,平衡杆铅垂运动机构设于行走装置上,平衡杆平动机构设于平衡杆铅垂运动机构上,平衡杆转动机构设于平衡杆平动机构上;检测控制装置包括陀螺仪和运动控制器、伺服驱动器、无线模块以及电池组,运动控制器根据陀螺仪的信号向伺服驱动器发出指令控制行走轮行走,并于行走过程中控制转动、平动和铅垂运动的综合运动进行平衡。本发明可模拟人类走钢丝
球形走钢丝机器人及其行走方法.pdf
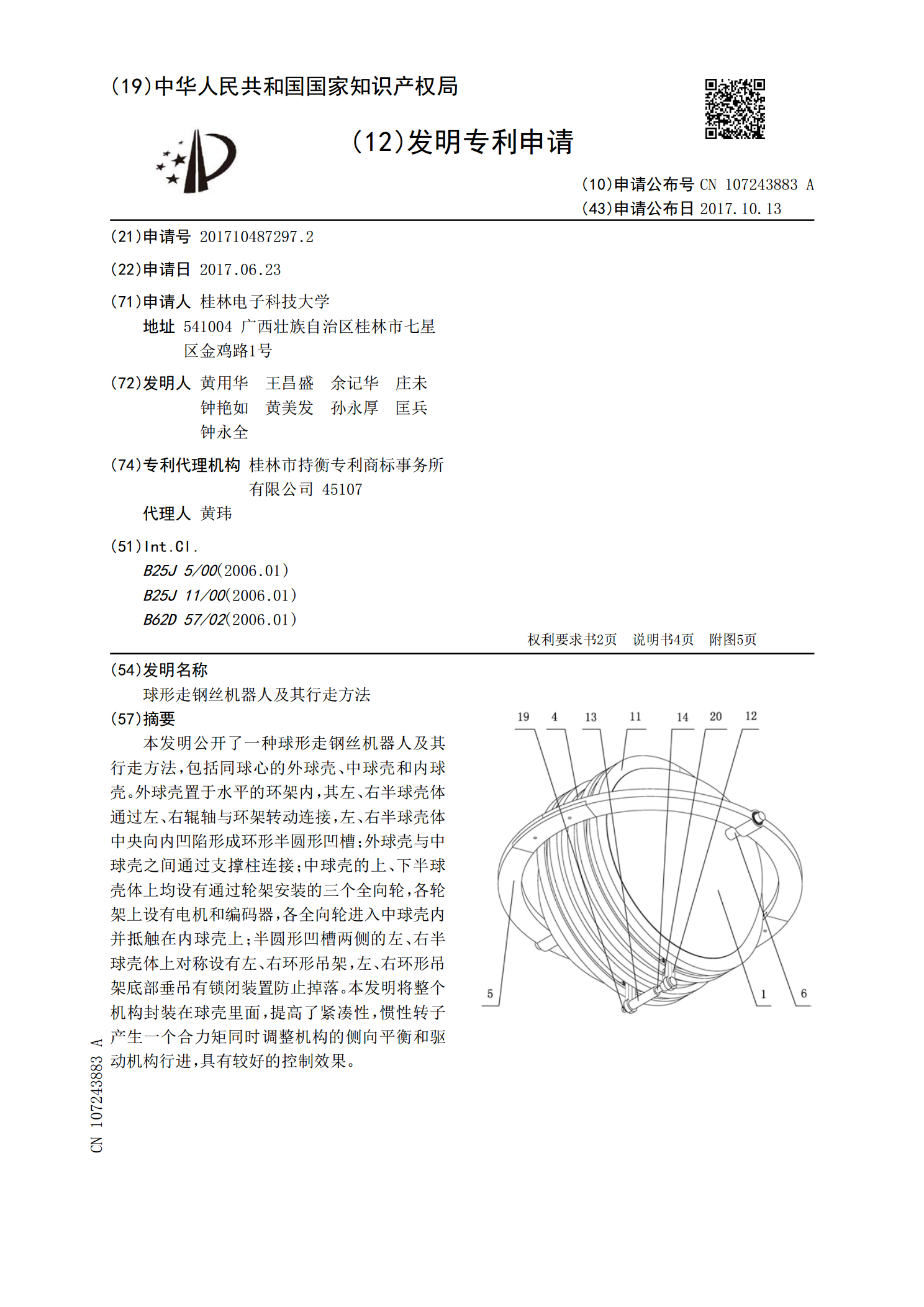
本发明公开了一种球形走钢丝机器人及其行走方法,包括同球心的外球壳、中球壳和内球壳。外球壳置于水平的环架内,其左、右半球壳体通过左、右辊轴与环架转动连接,左、右半球壳体中央向内凹陷形成环形半圆形凹槽;外球壳与中球壳之间通过支撑柱连接;中球壳的上、下半球壳体上均设有通过轮架安装的三个全向轮,各轮架上设有电机和编码器,各全向轮进入中球壳内并抵触在内球壳上;半圆形凹槽两侧的左、右半球壳体上对称设有左、右环形吊架,左、右环形吊架底部垂吊有锁闭装置防止掉落。本发明将整个机构封装在球壳里面,提高了紧凑性,惯性转子产生一

机器人行走仿真与控制研究.docx
机器人行走仿真与控制研究中文摘要:本文通过对机器人行走仿真与控制的研究,探究了机器人行走仿真的基本原理,分析了机器人行走控制中的基础问题与方法,研究了基于PID控制算法的机器人行走稳定性优化等相关内容。实验结果表明,本文所研究的机器人行走仿真与控制方法,能够有效提升机器人行走的稳定性和效率,为机器人行走控制研究提供了一定的参考价值。关键词:机器人;行走仿真;控制研究;PID算法;稳定性优化Abstract:Thispaperexploresthebasicprinciplesofrobotwalkings
可越障的走钢丝机器人及其行走越障方法.pdf
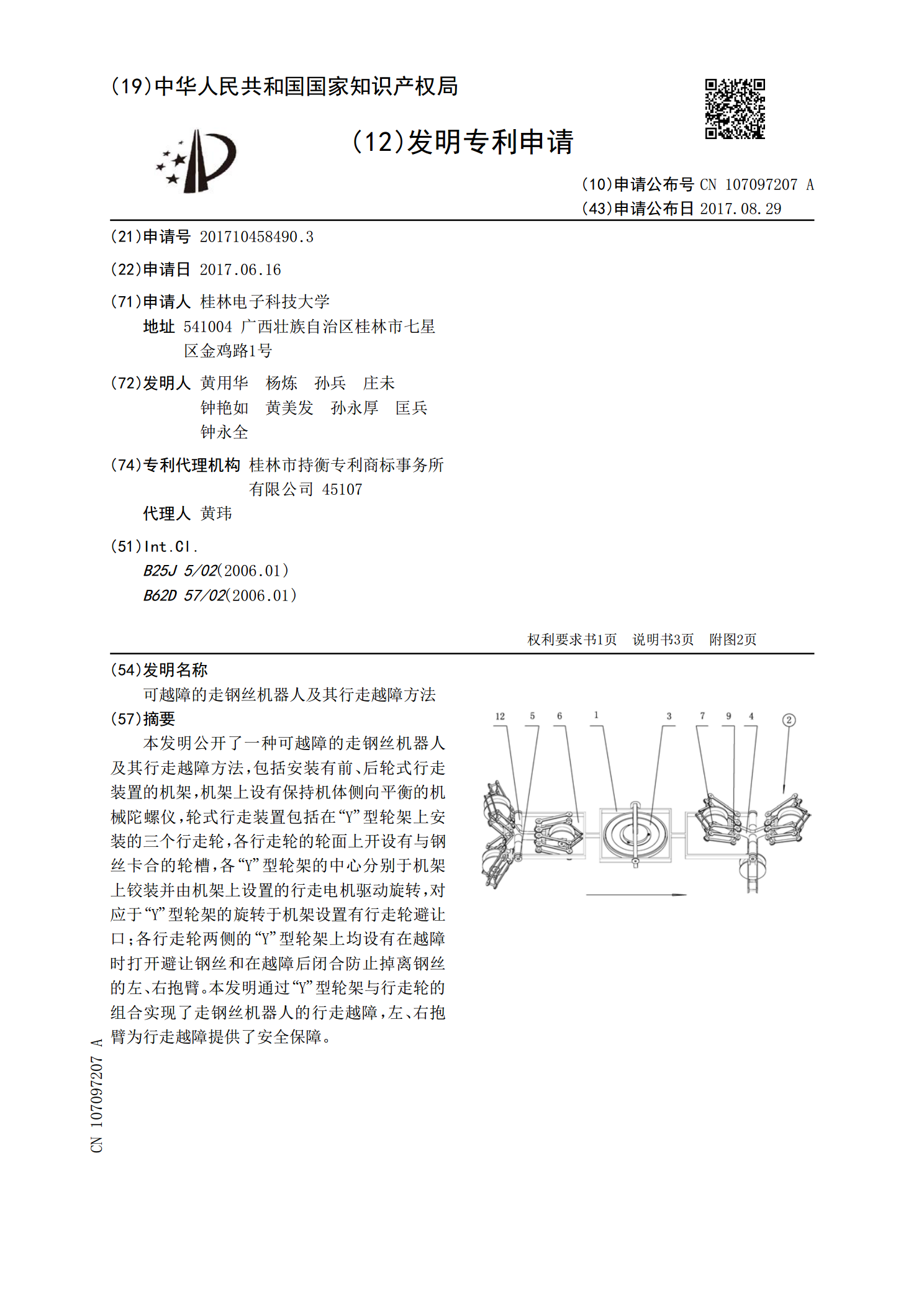
本发明公开了一种可越障的走钢丝机器人及其行走越障方法,包括安装有前、后轮式行走装置的机架,机架上设有保持机体侧向平衡的机械陀螺仪,轮式行走装置包括在“Y”型轮架上安装的三个行走轮,各行走轮的轮面上开设有与钢丝卡合的轮槽,各“Y”型轮架的中心分别于机架上铰装并由机架上设置的行走电机驱动旋转,对应于“Y”型轮架的旋转于机架设置有行走轮避让口;各行走轮两侧的“Y”型轮架上均设有在越障时打开避让钢丝和在越障后闭合防止掉离钢丝的左、右抱臂。本发明通过“Y”型轮架与行走轮的组合实现了走钢丝机器人的行走越障,左、右抱臂

六足机器人行走与运动仿真分析.docx
六足机器人行走与运动仿真分析Title:Six-LeggedRobot:WalkingandMotionSimulationAnalysisAbstract:Theaimofthispaperistoanalyzethewalkingandmotionsimulationofasix-leggedrobot.Six-leggedrobotshavegainedsignificantattentioninroboticsduetotheirabilitytonavigatecomplexterrainsan