
旋臂变距式可变速比装置.pdf

雅云****彩妍


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

旋臂变距式可变速比装置.pdf
本发明公开了一种旋臂变距式可变速比装置,包括输入轴,该输入轴通过万向节连接扭转轴,还包括有一输出轴;其中所述的扭转轴与输出轴两体之间通过悬臂铰连接,通过输出轴与齿轮齿条传动机构连接。利用传统齿轮齿条齿传动机构,通过扭转轴与输出轴之间设置了铰接的悬臂,使之扭转轴转动时控制输出轴转动至不同位置时,扭转轴与输出轴两体之间改变了输出角度,从而实现了不同位置的变速比,及控制传动机构不同部位自然过渡平顺啮合,使之具有传动效率高、齿间磨损小。

旋臂式停车装置.pdf
本发明公开了旋臂式停车装置,其包含载车板组件,载车板组件两侧通过钢结构组件支撑;两个钢结构组件底部分别通过主移动箱体组件和副移动箱体组件安装在反倾倒地面导轨上;安装在主移动箱体组件上的钢结构组件的侧面设置有立柱组件,立柱组件上安装有沿着立柱组件高度方向滑动的升降平台滑轮组件;所述升降平台滑轮组件包含与载车板组件侧面固定连接的升降平台;还包含用于驱动立柱组件转动的旋转机构组件,旋转机构组件安装在钢结构组件和立柱组件的顶端;所述主移动箱体组件底部设置两条反倾倒地面导轨;所述副移动箱体组件底部设置一条反倾倒地面

旋翼直升机的旋翼变距控制装置.pdf
一种旋翼直升机的旋翼变距控制装置,将总桨距滑套设在一主轴支撑座的腔内,总桨距滑套连接总桨距操纵机构,一用于控制周期变距的主控制杆通过球头间隙配合在总桨距滑套的球窝中,一用于控制旋翼迎角变化的同步控制臂可转动的连接在主控制杆上部,主控制杆下端连接周期变距操纵机构,一桨毂可转动的套在主轴支撑座外,桨毂扭力传递装置与用于控制旋翼迎角变化的同步控制臂连接,旋翼安装在桨毂上,通过拉杆与用于控制旋翼迎角变化的同步控制臂连接,桨毂下部圆周设置圆周齿与变速箱的输出齿轮啮合。它以桨毂兼做主轴,缩短旋翼距变速箱之间的轴向距离

可变速比的调速装置.pdf
一种可变速比的调速装置,属于机械齿轮箱技术领域,适用于风力发电机调速的应用。包括与增速箱输出轴连接的输入轴,与发电机输入轴连接的输出轴,所述输出轴与输入轴轴心相同;太阳轮,安装于输出轴上;差动轮,带有内外齿圈,与太阳轮同轴心,安装于输入轴上;行星轮,至少为一个,均匀分布于太阳轮和差动轮之间,分别与太阳轮和差动轮啮合;电机轮,与差动电机输出轴连接,并与差动轮外齿圈啮合;外框架,与输入轴、输出轴端通过轴承连接,并分别连接电机轮外壳和发电机组增速箱;输入轴、输出轴和差动电机输出轴上均设有速度传感器,差动电机及各
机械联动变距式取样装置.pdf
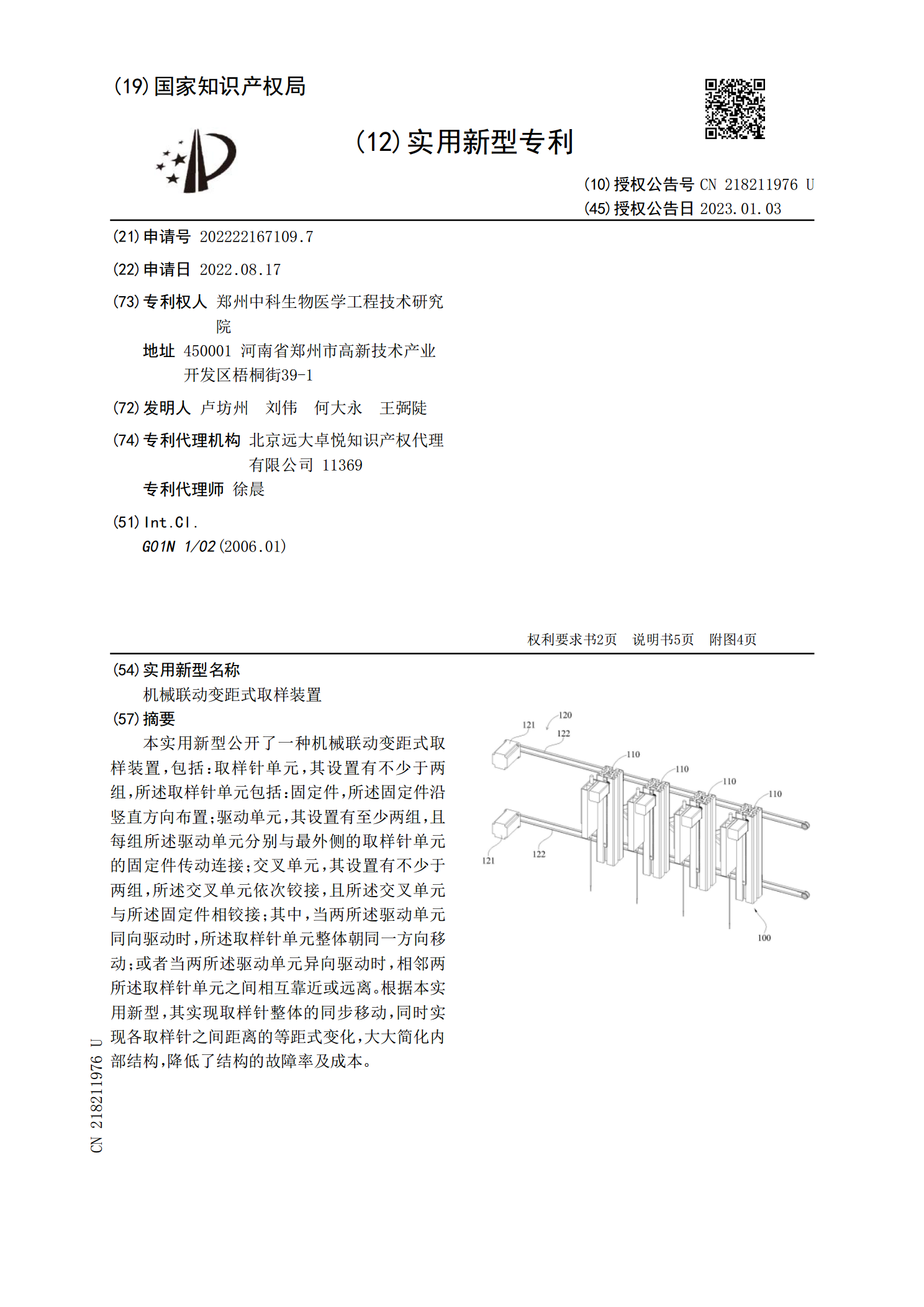
本实用新型公开了一种机械联动变距式取样装置,包括:取样针单元,其设置有不少于两组,所述取样针单元包括:固定件,所述固定件沿竖直方向布置;驱动单元,其设置有至少两组,且每组所述驱动单元分别与最外侧的取样针单元的固定件传动连接;交叉单元,其设置有不少于两组,所述交叉单元依次铰接,且所述交叉单元与所述固定件相铰接;其中,当两所述驱动单元同向驱动时,所述取样针单元整体朝同一方向移动;或者当两所述驱动单元异向驱动时,相邻两所述取样针单元之间相互靠近或远离。根据本实用新型,其实现取样针整体的同步移动,同时实现各取样针