
定位导航系统及其控制方法.pdf

雨巷****轶丽


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

定位导航系统及其控制方法.pdf
本发明提供一种定位导航系统,通过多个网络摄像头采集运载平台上的红外激光光源的信息,将该信息通过无线方式传送到服务器中,服务器对该信息处理分析后确定该运载平台的具体位置,再通过无线方式传送到运载平台中的主控板,主控板再结合RFID卡的信息,来控制电机驱动器驱动电机调整麦克纳姆全向轮的速度与转向。本发明还提供一种定位导航系统的控制方法,结合网络摄像头中带有红外线的视频流确定相应运载平台的位置,结合运载平台的自身姿态、RFID卡信息来确定运载平台的最佳运行路径。

一种室内盲人定位导航系统及其方法.pdf
本发明公开了一种室内盲人定位导航系统及其方法,包括UWB单元、中央处理模块、语音识别转换模块和Apriltag单元,UWB单元的输出端与中央处理模块的输入端连接,语音识别转换模块的输出端与中央处理模块的输入端连接,Apriltag单元的输出端与中央处理模块的输入端连接,涉及导航技术领域。该室内盲人定位导航系统及其方法,可以利用UWB对信道衰落不敏感、发射信号功率谱密度低、能提供厘米级的定位精度等优点实现盲人精准定位、利用Apritag来识别障碍物信息和优选择最优路线,当盲人独自在家时,可以减轻服务人员的实
一种室内车辆的精确定位导航系统及其方法.pdf
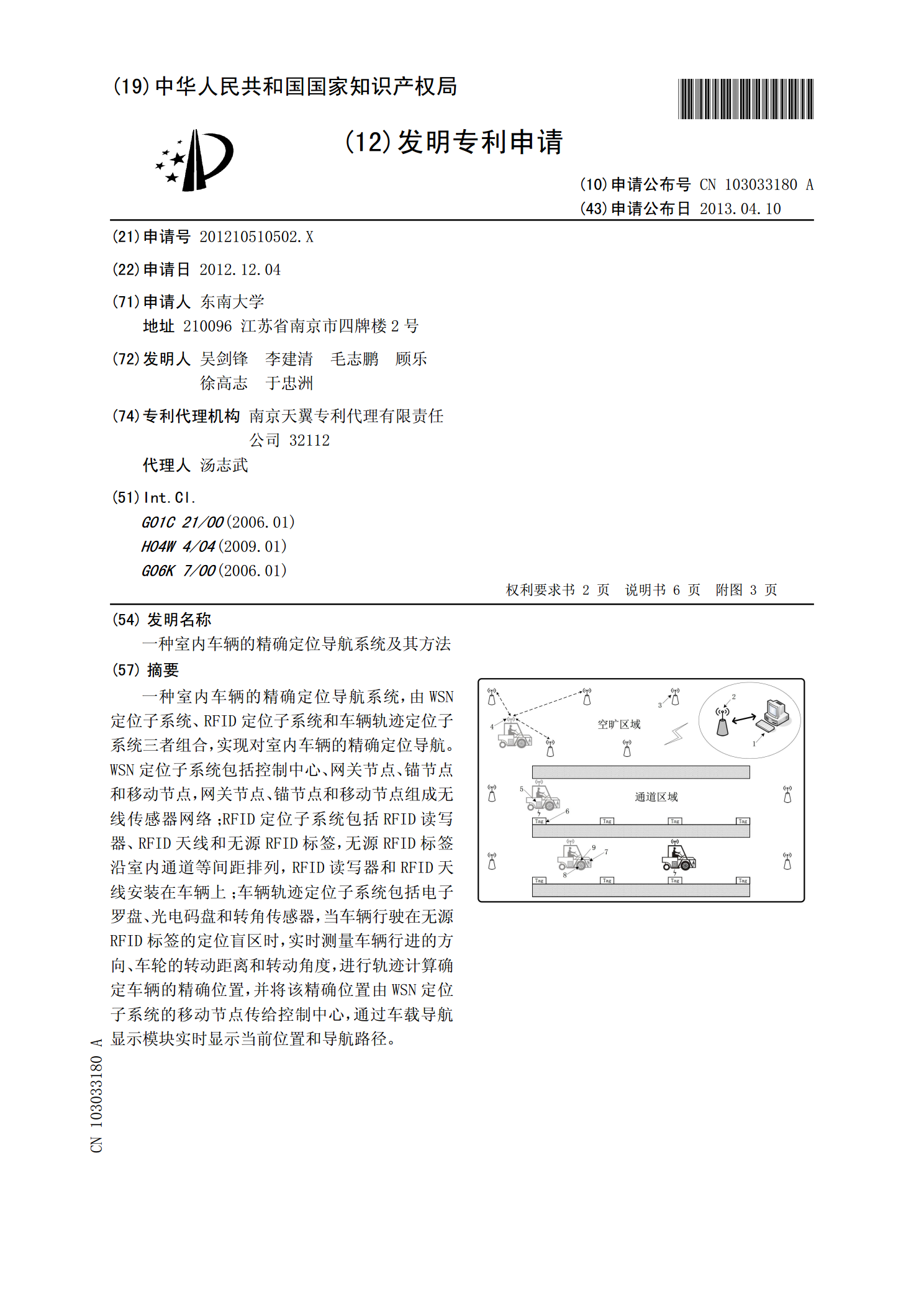
一种室内车辆的精确定位导航系统,由WSN定位子系统、RFID定位子系统和车辆轨迹定位子系统三者组合,实现对室内车辆的精确定位导航。WSN定位子系统包括控制中心、网关节点、锚节点和移动节点,网关节点、锚节点和移动节点组成无线传感器网络;RFID定位子系统包括RFID读写器、RFID天线和无源RFID标签,无源RFID标签沿室内通道等间距排列,RFID读写器和RFID天线安装在车辆上;车辆轨迹定位子系统包括电子罗盘、光电码盘和转角传感器,当车辆行驶在无源RFID标签的定位盲区时,实时测量车辆行进的方向、车轮的

遥控定位系统及其控制方法.pdf
本发明提供了一种遥控定位系统及其控制方法,本发明的遥控定位系统包括第一调整模块、执行模块、执行器械、X光透视模块、手术床、主机和遥控模块。本发明的遥控定位系统通过所述遥控模块输入控制信号,并通过所述主机结构所述控制信号并控制所述第一调整模块的启闭,对所述执行模块在空间内的位置和角度进行调整,使操作人员不必暴露在X射线下,对操作人员形成保护,通过所述X光透视模块获取病灶点信息,获取手术目标点位,便于手术方案的制定,同时通过所述执行模块或所述执行器械设有可在X光下显影的刻度,便于观察所述执行模块或所述执行器械

GPS导航系统快速定位方法研究.docx
GPS导航系统快速定位方法研究标题:GPS导航系统快速定位方法研究摘要:随着全球定位系统(GPS)的广泛应用,GPS导航系统的定位准确度和快速定位成为了研究的重要问题。本文以GPS导航系统为研究对象,分析了其快速定位的意义,探讨了现有的快速定位方法,并提出了一种基于XXX的快速定位算法。实验结果显示,该算法相对于传统方法具有更快的定位速度和更高的定位准确度。1.引言GPS导航系统已成为现代社会中不可或缺的一部分,应用广泛,如交通导航、物流管理、移动通信等。然而,在现实应用中,GPS导航系统的准确度和快速定