
用于多轴联动动态修正插补位置的全闭环运动控制方法.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于多轴联动动态修正插补位置的全闭环运动控制方法.pdf
本发明涉及一种用于多轴联动动态修正插补位置的全闭环运动控制方法。在第一个命令位置坐标上,根据采集到的各轴实际位置与电机实际位置之间的偏差,调整各轴命令位置;对调整后的各轴命令位置矢量在被加工轨迹上投影,得到投影长度,确定修正后的命令位置;当满足全闭环条件时,停止调整;当程序段处于混联且有后续运动段时,则将本运动段与下一运动段进行速度连接处理;否则,不对插补位置进行调整,直到当前运动段插补完成,再在系统提供的定位时长内,通过PID控制算法使轴的实际位置运动到命令位置上。本发明可以在满足多轴联动轮廓精度、定位
一种多轴联动管道插补全闭环运动控制方法.pdf
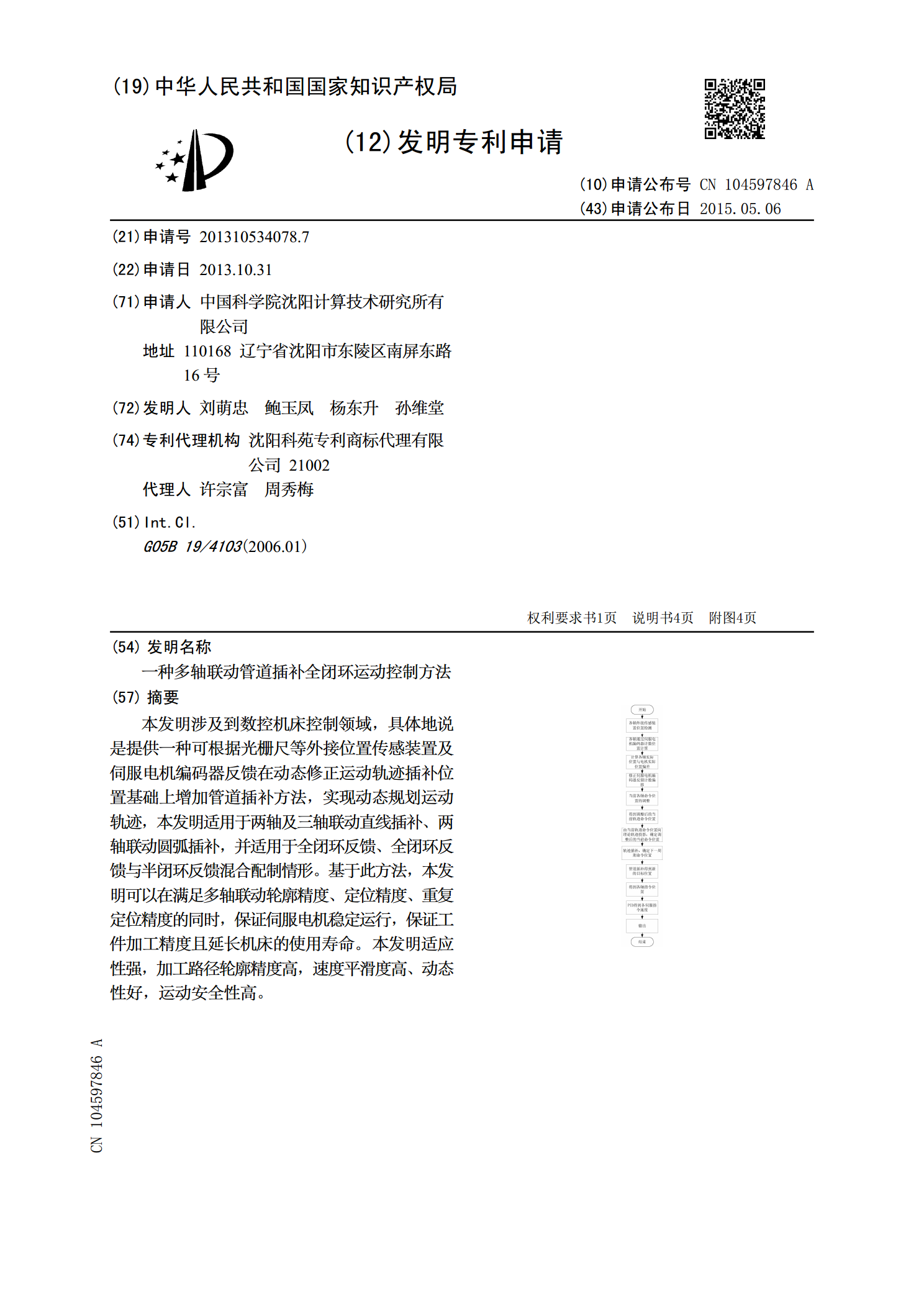
本发明涉及到数控机床控制领域,具体地说是提供一种可根据光栅尺等外接位置传感装置及伺服电机编码器反馈在动态修正运动轨迹插补位置基础上增加管道插补方法,实现动态规划运动轨迹,本发明适用于两轴及三轴联动直线插补、两轴联动圆弧插补,并适用于全闭环反馈、全闭环反馈与半闭环反馈混合配制情形。基于此方法,本发明可以在满足多轴联动轮廓精度、定位精度、重复定位精度的同时,保证伺服电机稳定运行,保证工件加工精度且延长机床的使用寿命。本发明适应性强,加工路径轮廓精度高,速度平滑度高、动态性好,运动安全性高。

多轴插补控制方法与装置.pdf
本发明提供一种多轴插补控制方法及装置,该方法包括以下步骤:控制逻辑启动指令,计算参与插补轴的参数,并将这些参数传递给N个驱动器通讯模块;在插补运行过程中,虚拟主轴模块持续发出虚拟主轴,驱动参与插补各轴的电子凸轮模块运行;驱动器通讯模块接收到有效参数后,对通讯数据进行校验,校验通过后将参数发送到电子凸轮模块;电子凸轮模块根据虚拟主轴及输入参数进行周期计算,并在每个周期将周期脉冲量发送到电机控制模块;电机控制模块接收电子凸轮模块输出的周期脉冲,控制电机运行。本发明的多轴插补控制方法,只需要在控制器和电机驱动器

基于FPGA的多轴联动插补控制器的设计.docx
基于FPGA的多轴联动插补控制器的设计基于FPGA的多轴联动插补控制器的设计摘要:随着工业自动化水平的不断提高,多轴联动插补控制器在工业生产中发挥着至关重要的作用。本文旨在设计一种基于FPGA的多轴联动插补控制器,该控制器具有高性能、低延迟和高稳定性的特点。本文首先介绍了FPGA的相关知识和多轴联动插补控制的基本原理,然后详细描述了控制器的硬件系统设计和软件算法实现方案。实验证明,本文设计的控制器具有优良的性能和稳定性,可以满足多轴联动插补控制的实时性和精度要求。关键词:FPGA、多轴联动、插补控制、硬件

多轴插补方法.pdf
本发明公开了一种多轴插补方法,属于机械插补方法技术领域。包括基于ARM或者DSP芯片的计数器、脉冲发生器和或门,所述或门连接所述计数器和脉冲发生器;通过计数器、脉冲发生器和或门实现脉冲发生的控制,具体步骤首先计算得到轨迹轮廓数据;然后转化为多轴直线插补控制指令或者多轴螺旋插补控制指令;由脉冲发送器发出脉冲信号,脉冲信号和计数器的设定信号匹配,经过或门最终将该脉冲信号输出;最终输出给伺服电机从而带动各电机实现多轴插补运动控制。本技术提高了插补计算的速度,同时减少插补时间周期,提高了效率,降低了成本。