
轮胎多级轮辋不平衡量标定方法.pdf

一只****呀淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮胎多级轮辋不平衡量标定方法.pdf
本发明所述的轮胎多级轮辋不平衡量标定方法,针对动平衡试验机的多级轮辋结构,在测算标定系数之前,先将上、下轮辋校正面放置的测试砝码质量,分别地等效至某一级上、下轮辋的平面上,以期等同于上、下轮辋平面上安装测试砝码,以有效地解决无法在多级轮辋的平面上安装砝码的问题,从而显著地提高标定系数的测算精度。即在测算标定系数之前,将上、下轮辋校正面MU、MD处放置质量为M的测试砝码,分别地等效至装卡于某一级轮辋的轮胎不平衡质量存在的mU、mD处,以期等同于在mU、mD处安装测试砝码。

轮胎动平衡试验机系统不平衡量的动态补偿轮辋及方法.pdf
本发明公开了一种轮胎动平衡试验机系统不平衡量的动态补偿轮辋及方法,本发明解决了轮胎动平衡试验机较大的系统不平衡量影响其测试精度和分辨率,偏心补偿算法和操作仅用于解算系统不平衡质量,并不具备真正补偿系统不平衡量的功能,目前的部分补偿装置不仅对原有结构要求较大改动,而且配重校正面与测量校正面不一致的问题,通过在轮辋的正交方向上设有4个带刻线的T型槽,且配备配重块,每组配重块均为一对和正交T型槽尺寸匹配的T型螺栓-螺母副结构。通过已知质量的配重块的移动组合,可将系统不平衡量降至理想范围,有效提高了设备的检测精度
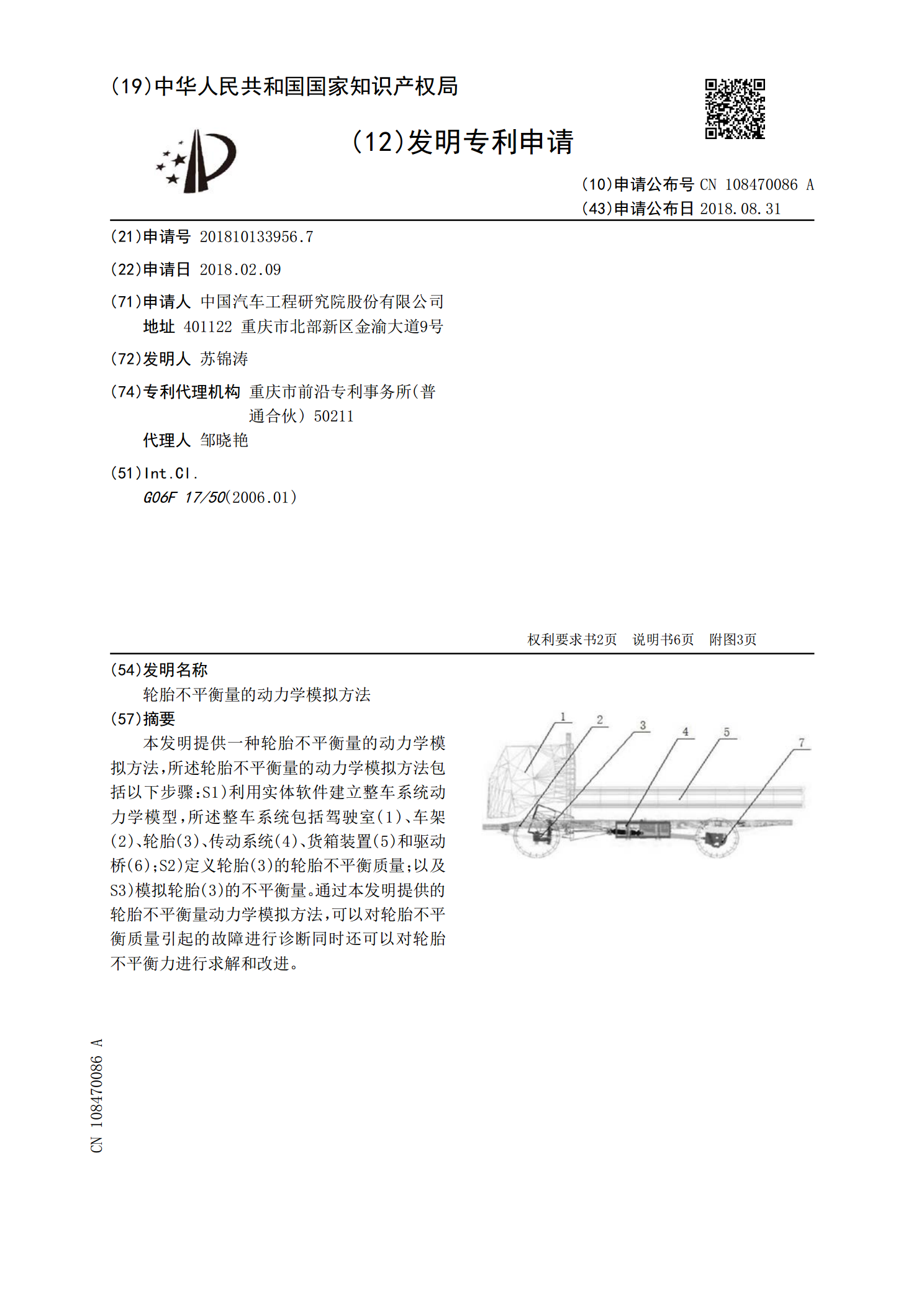
轮胎不平衡量的动力学模拟方法.pdf
本发明提供一种轮胎不平衡量的动力学模拟方法,所述轮胎不平衡量的动力学模拟方法包括以下步骤:S1)利用实体软件建立整车系统动力学模型,所述整车系统包括驾驶室(1)、车架(2)、轮胎(3)、传动系统(4)、货箱装置(5)和驱动桥(6);S2)定义轮胎(3)的轮胎不平衡质量;以及S3)模拟轮胎(3)的不平衡量。通过本发明提供的轮胎不平衡量动力学模拟方法,可以对轮胎不平衡质量引起的故障进行诊断同时还可以对轮胎不平衡力进行求解和改进。
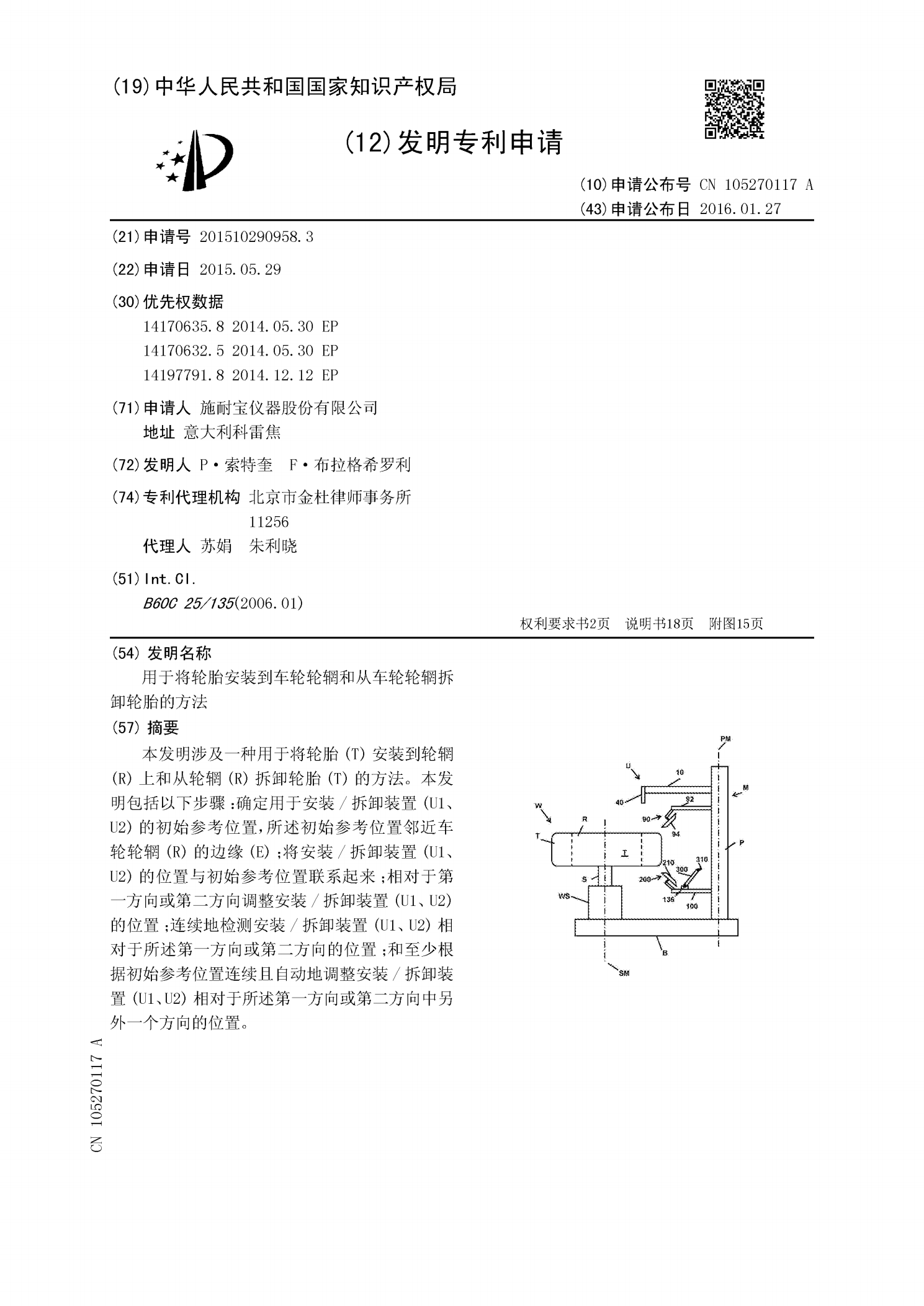
用于将轮胎安装到车轮轮辋和从车轮轮辋拆卸轮胎的方法.pdf
本发明涉及一种用于将轮胎(T)安装到轮辋(R)上和从轮辋(R)拆卸轮胎(T)的方法。本发明包括以下步骤:确定用于安装/拆卸装置(U1、U2)的初始参考位置,所述初始参考位置邻近车轮轮辋(R)的边缘(E);将安装/拆卸装置(U1、U2)的位置与初始参考位置联系起来;相对于第一方向或第二方向调整安装/拆卸装置(U1、U2)的位置;连续地检测安装/拆卸装置(U1、U2)相对于所述第一方向或第二方向的位置;和至少根据初始参考位置连续且自动地调整安装/拆卸装置(U1、U2)相对于所述第一方向或第二方向中另外一个方向

将轮胎装配至车轮轮辋上或从轮辋拆卸轮胎的设备和方法.pdf
本发明涉及一种用于将轮胎(T)装配在车轮(W)的轮辋(R)上以及从车轮(W)的轮辋(R)拆卸轮胎(T)的设备。该设备包括用于装配和拆卸轮胎(T)的至少一个安装或移除工具(32),以及用于至少对所述至少一个安装或移除工具(32)的运动进行控制的控制单元。此外,负载测量装置(40)附接至所述至少一个安装或移除工具(32),以测量在将所述轮胎(T)装配至所述轮辋(R)或从所述轮辋(R)拆卸所述轮胎(T)时施加至所述至少一个安装或移除工具(32)的负载。本发明还涉及一种用于将轮胎(T)装配在车轮(W)的轮辋(R)