
三轴机器人.pdf

新月****姐a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

三轴机器人.pdf
一种三轴机器人,其包括依次连接的第一机械臂、第二机械臂、第三机械臂及执行机构,第一机械臂驱动第二机械臂沿第一机械臂运动,第二机械臂驱动第三机械臂沿第二机械臂运动,第三机械臂驱动执行机构沿第三机械臂运动,执行机构的运动方向相对第三机械臂的运动所在的平面斜交。上述三轴机器人,由于执行机构的运动方向相对第三机械臂的运动所在的平面斜交,使得三轴机器人的整体体积减小,且三个机械臂之间的运动均为线性运动,避免使用复杂的齿轮、减速器等结构,实现三轴机器人的小型化。小型化的机器人能够较精确地对结构细微的工件或本身细小的工

三轴式龙门机器人.pdf
一种三轴式龙门机器人,它包括立柱,所述立柱上装有X轴组件,X轴组件上装有Y轴组件,Y轴组件一侧装有Z轴组件;所述X轴组件可沿水平方向来回移动;所述Y轴组件可以沿垂直于水平方向前后移动;所述Z轴组件可以沿垂直于水平方向上下移动;所述Z轴组件下端装有爪手;本发明利用齿轮和滑块的配合,通过马达驱动,实现龙门机器人在三维立体空间内进行运动,从而满足多台机床的联合工作,降低了多台机床联合工作时对场地的要求,降低了生产成本,提高了生产效率,整台设备结构简单,操作容易。利于大范围推广。
管道机器人三轴差动机构.pdf
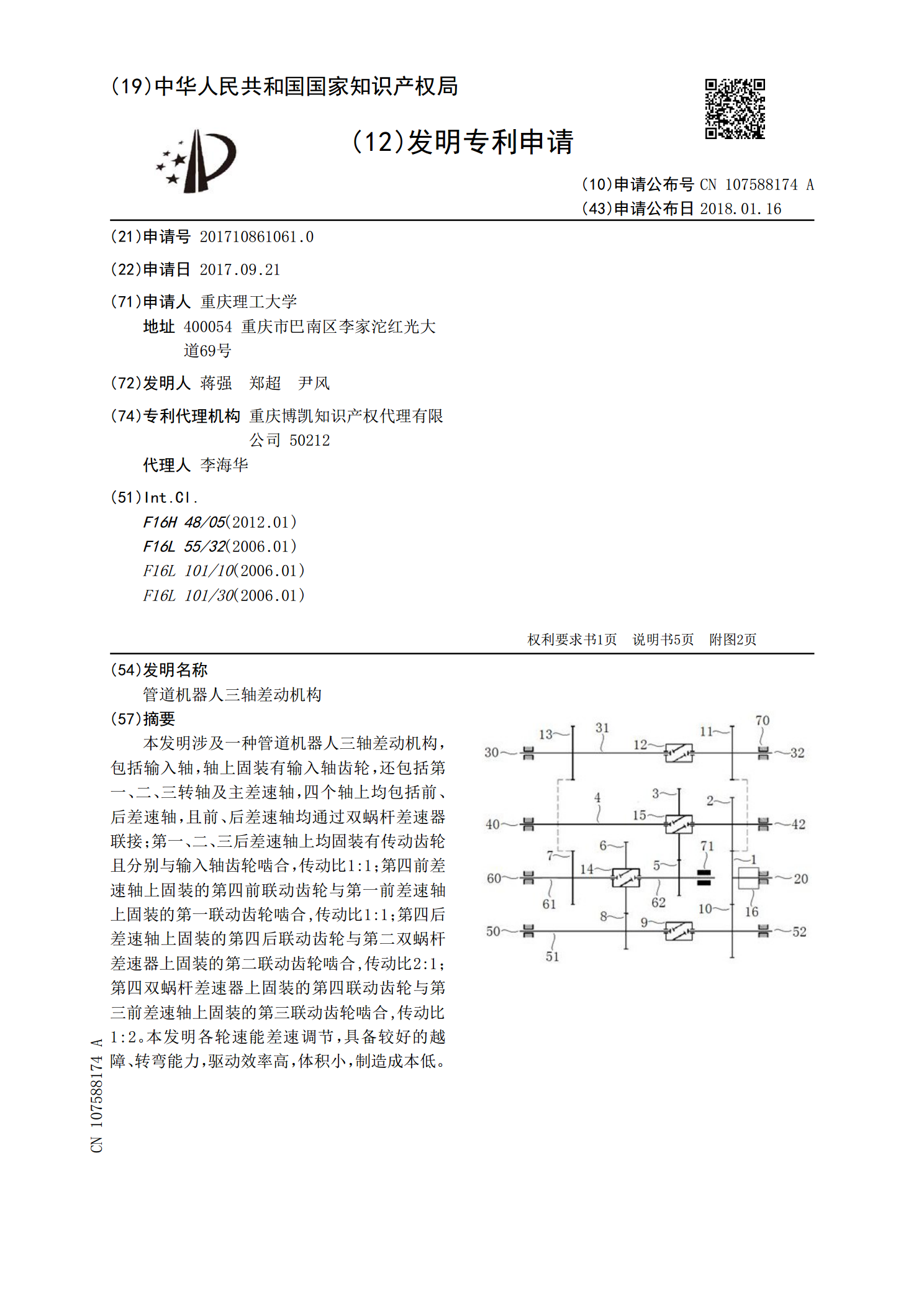
本发明涉及一种管道机器人三轴差动机构,包括输入轴,轴上固装有输入轴齿轮,还包括第一、二、三转轴及主差速轴,四个轴上均包括前、后差速轴,且前、后差速轴均通过双蜗杆差速器联接;第一、二、三后差速轴上均固装有传动齿轮且分别与输入轴齿轮啮合,传动比1:1;第四前差速轴上固装的第四前联动齿轮与第一前差速轴上固装的第一联动齿轮啮合,传动比1:1;第四后差速轴上固装的第四后联动齿轮与第二双蜗杆差速器上固装的第二联动齿轮啮合,传动比2:1;第四双蜗杆差速器上固装的第四联动齿轮与第三前差速轴上固装的第三联动齿轮啮合,传动比

三轴桁架机器人运动学.pdf

三轴桁架机器人运动学.pdf
三轴桁架机器人运动学1.引言1.1概述在撰写本篇长文时,我们将探讨关于三轴桁架机器人运动学的内容。机器人技术在现代工业中扮演着越来越重要的角色,其广泛应用于制造业、医疗保健、服务业等领域。而机器人的运动学是研究机器人在空间中的运动及其轨迹规划的重要理论基础。三轴桁架机器人是一种常见且应用广泛的工业机器人。它由一个固定在底座上的立柱和两个臂架组成,每个臂架上面都安装有一个旋转关节,形成了三个轴。这种结构使得机器人能够在三个自由度上进行运动,实现各种复杂的动作。三轴桁架机器人具有结构简单、运动灵活等特点,因此