
磁力驱动管道机器人.pdf

努力****幻翠


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁力驱动管道机器人.pdf
本发明公开了一种磁力驱动管道机器人,属于管道驱动装置,包括管道内部机器人与外部小车,所述的管道内部机器人由机身以及分布在机身两端的驱动轮组组成,所述的机体的上表面设置有下磁体,所述的外部小车下部的下表面亦设置有与其相应的上磁体,所述机身的尾端还设有调整机构,机身的前端设有检修设备。该管道机器人能够借助管道外部小车的磁力驱动而运行,适用本发明,磁力驱动管道机器人可以穿越障碍,在管道内灵活运行;通过设置的检修设备及清洁设备可以对管道进行检修及清扫,功能多样,实用性强。

轴向力平衡磁力驱动管道泵.pdf
本发明轴向力平衡磁力驱动管道泵,包括泵体(1)、泵盖(2)、泵轴(3)、轴承座(4)、叶轮(5)、隔离套(6)、内磁转子(7)、外磁转子(8)、驱动轴(9)、托架(10),其特征是,叶轮(5)与泵轴(3)下端为滑动配合,使叶轮(5)轮毂(50)的上端面与下止推轴承(34)的下端面间形成一个轴向间隙(a),在叶轮(5)的轮毂(50)上开设有通流孔(56),使叶轮(5)轴向所受的压力作用平衡。
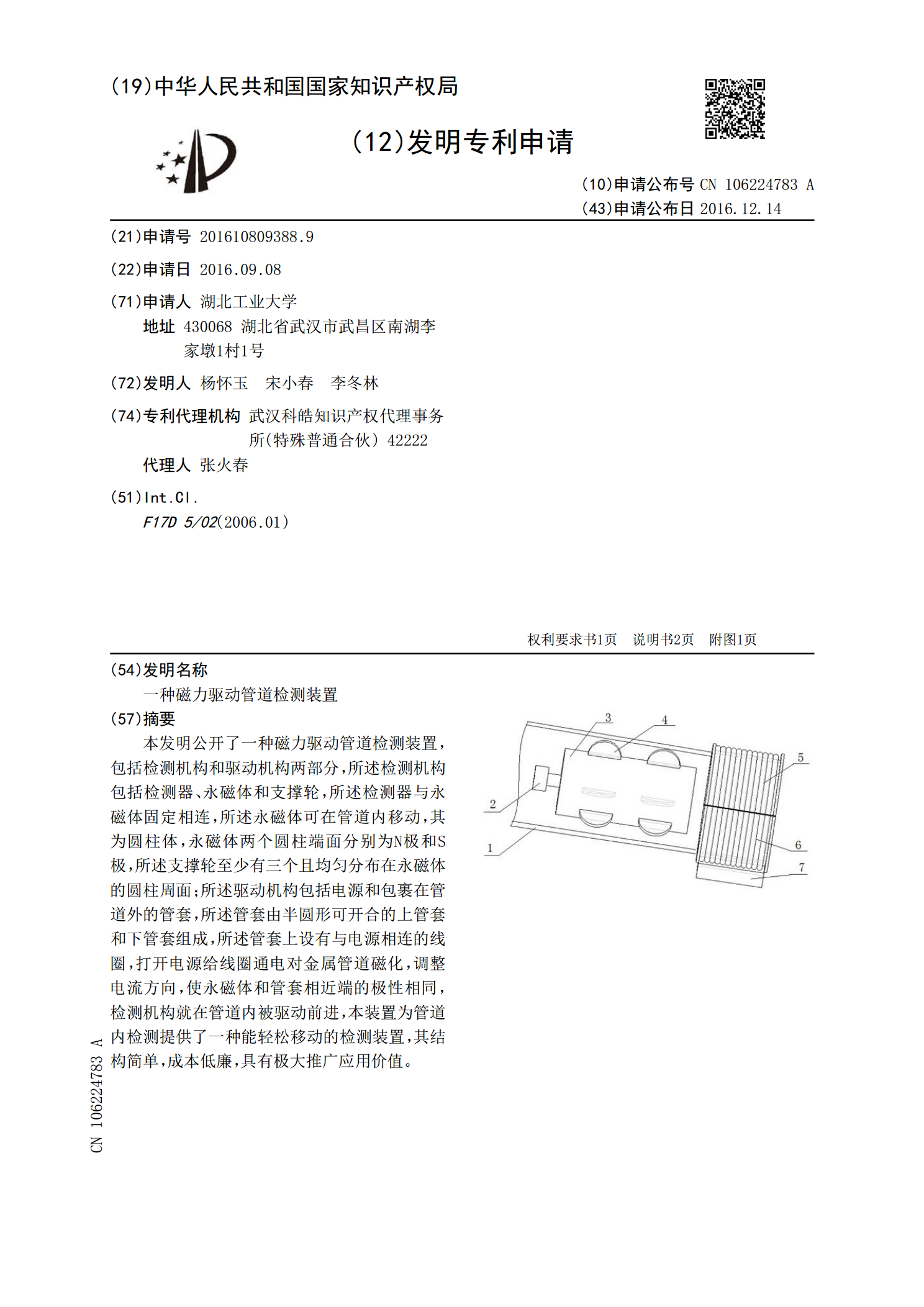
一种磁力驱动管道检测装置.pdf
本发明公开了一种磁力驱动管道检测装置,包括检测机构和驱动机构两部分,所述检测机构包括检测器、永磁体和支撑轮,所述检测器与永磁体固定相连,所述永磁体可在管道内移动,其为圆柱体,永磁体两个圆柱端面分别为N极和S极,所述支撑轮至少有三个且均匀分布在永磁体的圆柱周面;所述驱动机构包括电源和包裹在管道外的管套,所述管套由半圆形可开合的上管套和下管套组成,所述管套上设有与电源相连的线圈,打开电源给线圈通电对金属管道磁化,调整电流方向,使永磁体和管套相近端的极性相同,检测机构就在管道内被驱动前进,本装置为管道内检测提供
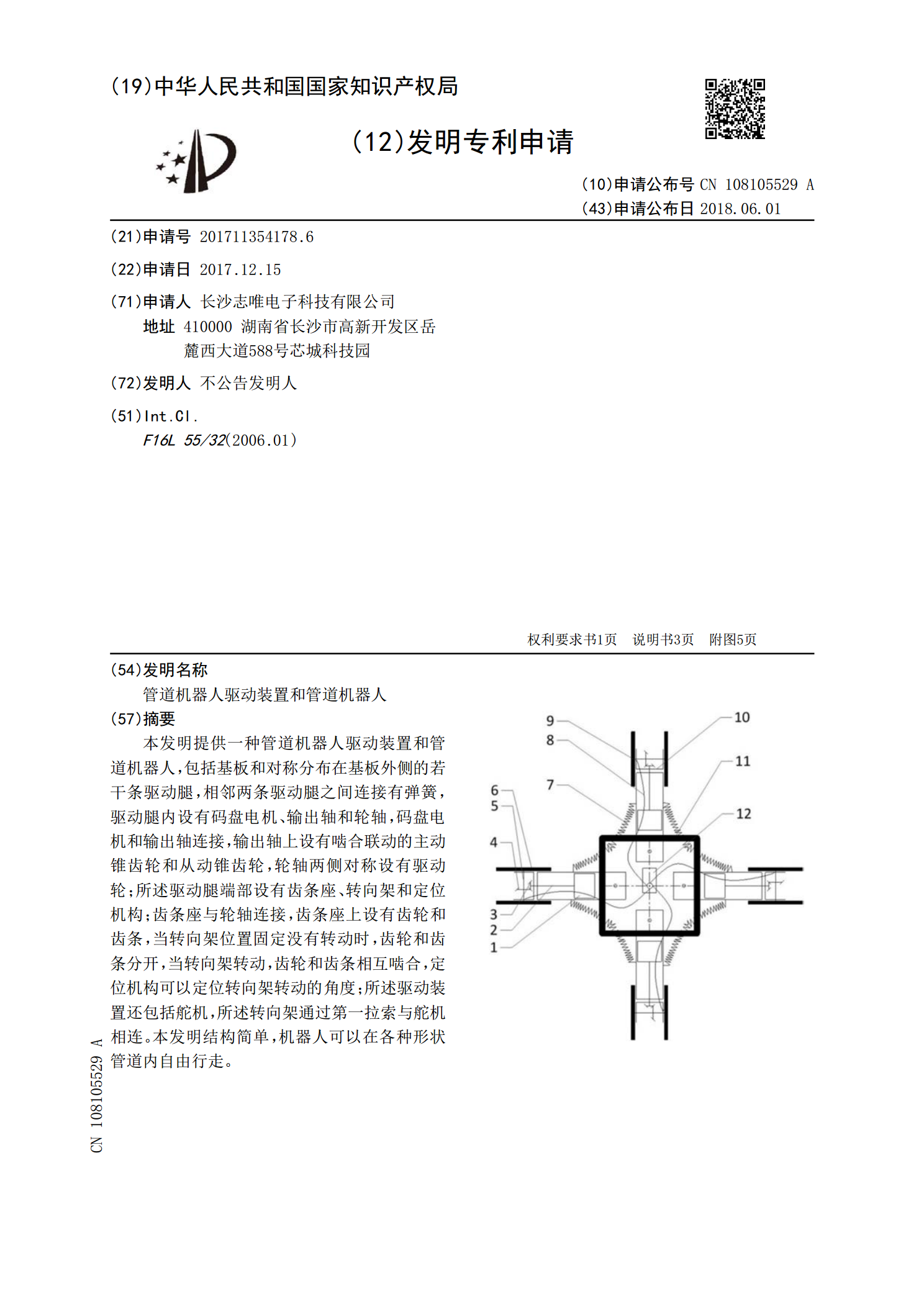
管道机器人驱动装置和管道机器人.pdf
本发明提供一种管道机器人驱动装置和管道机器人,包括基板和对称分布在基板外侧的若干条驱动腿,相邻两条驱动腿之间连接有弹簧,驱动腿内设有码盘电机、输出轴和轮轴,码盘电机和输出轴连接,输出轴上设有啮合联动的主动锥齿轮和从动锥齿轮,轮轴两侧对称设有驱动轮;所述驱动腿端部设有齿条座、转向架和定位机构;齿条座与轮轴连接,齿条座上设有齿轮和齿条,当转向架位置固定没有转动时,齿轮和齿条分开,当转向架转动,齿轮和齿条相互啮合,定位机构可以定位转向架转动的角度;所述驱动装置还包括舵机,所述转向架通过第一拉索与舵机相连。本发明
巡检机器人的双线圈磁力驱动方法.pptx
汇报人:CONTENTSPARTONEPARTTWO磁场产生与线圈电流的关系双线圈磁力驱动的原理驱动方式的优点驱动方式的缺点PARTTHREE驱动方式的适用范围驱动方式对巡检机器人性能的影响驱动方式对巡检机器人稳定性的影响驱动方式对巡检机器人安全性的影响PARTFOUR线圈设计磁场计算与仿真驱动电路设计驱动程序编写与调试PARTFIVE与传统驱动方式的比较与其他磁力驱动方式的比较双线圈磁力驱动方法的优势与不足PARTSIX技术发展趋势应用领域拓展方向未来研究重点与挑战汇报人: