
一种可控性全自动升降机.pdf

是立****92


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可控性全自动升降机.pdf
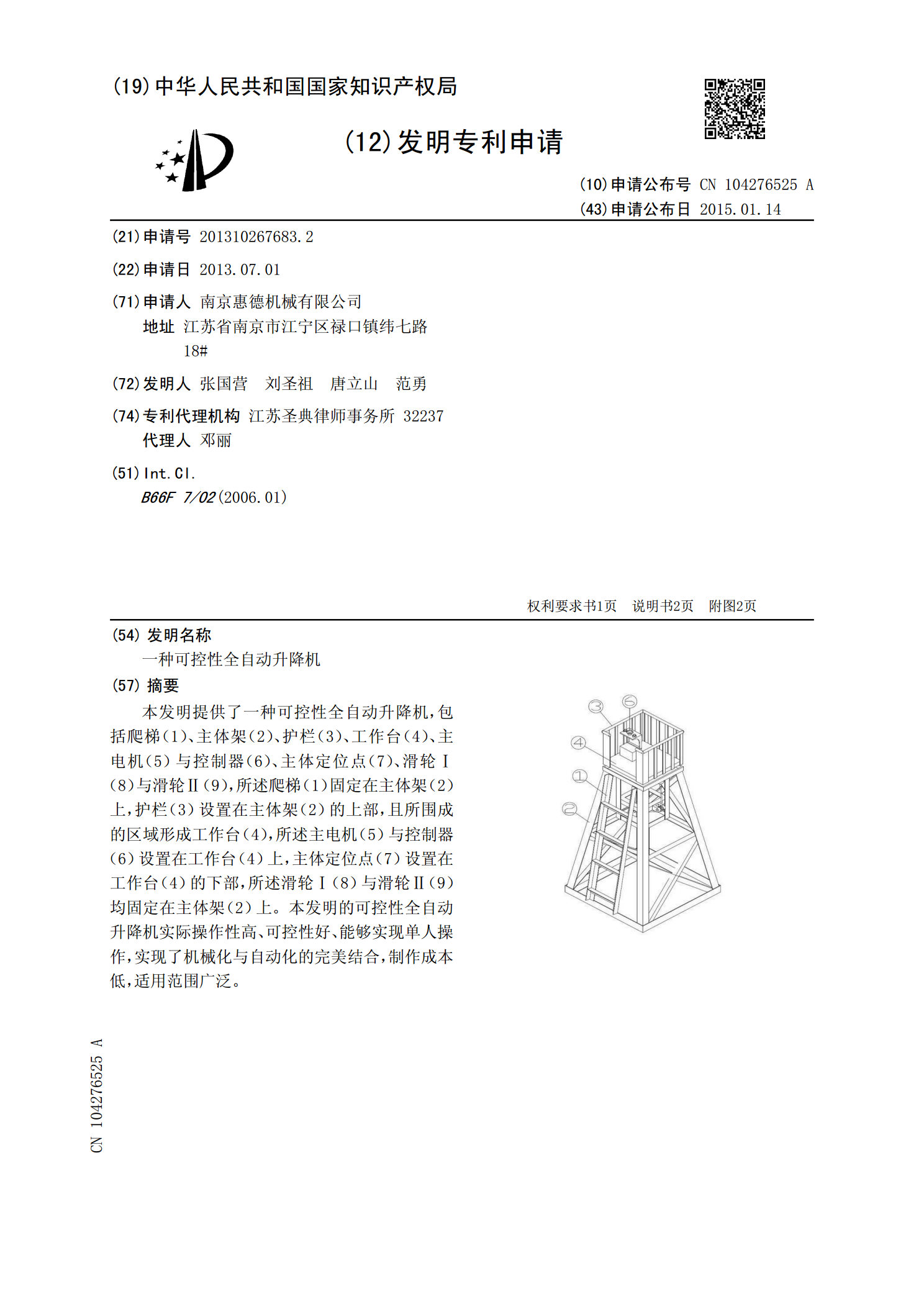
本发明提供了一种可控性全自动升降机,包括爬梯(1)、主体架(2)、护栏(3)、工作台(4)、主电机(5)与控制器(6)、主体定位点(7)、滑轮Ⅰ(8)与滑轮Ⅱ(9),所述爬梯(1)固定在主体架(2)上,护栏(3)设置在主体架(2)的上部,且所围成的区域形成工作台(4),所述主电机(5)与控制器(6)设置在工作台(4)上,主体定位点(7)设置在工作台(4)的下部,所述滑轮Ⅰ(8)与滑轮Ⅱ(9)均固定在主体架(2)上。本发明的可控性全自动升降机实际操作性高、可控性好、能够实现单人操作,实现了机械化与自动化的完
一种新型全自动纸垛升降机.pdf
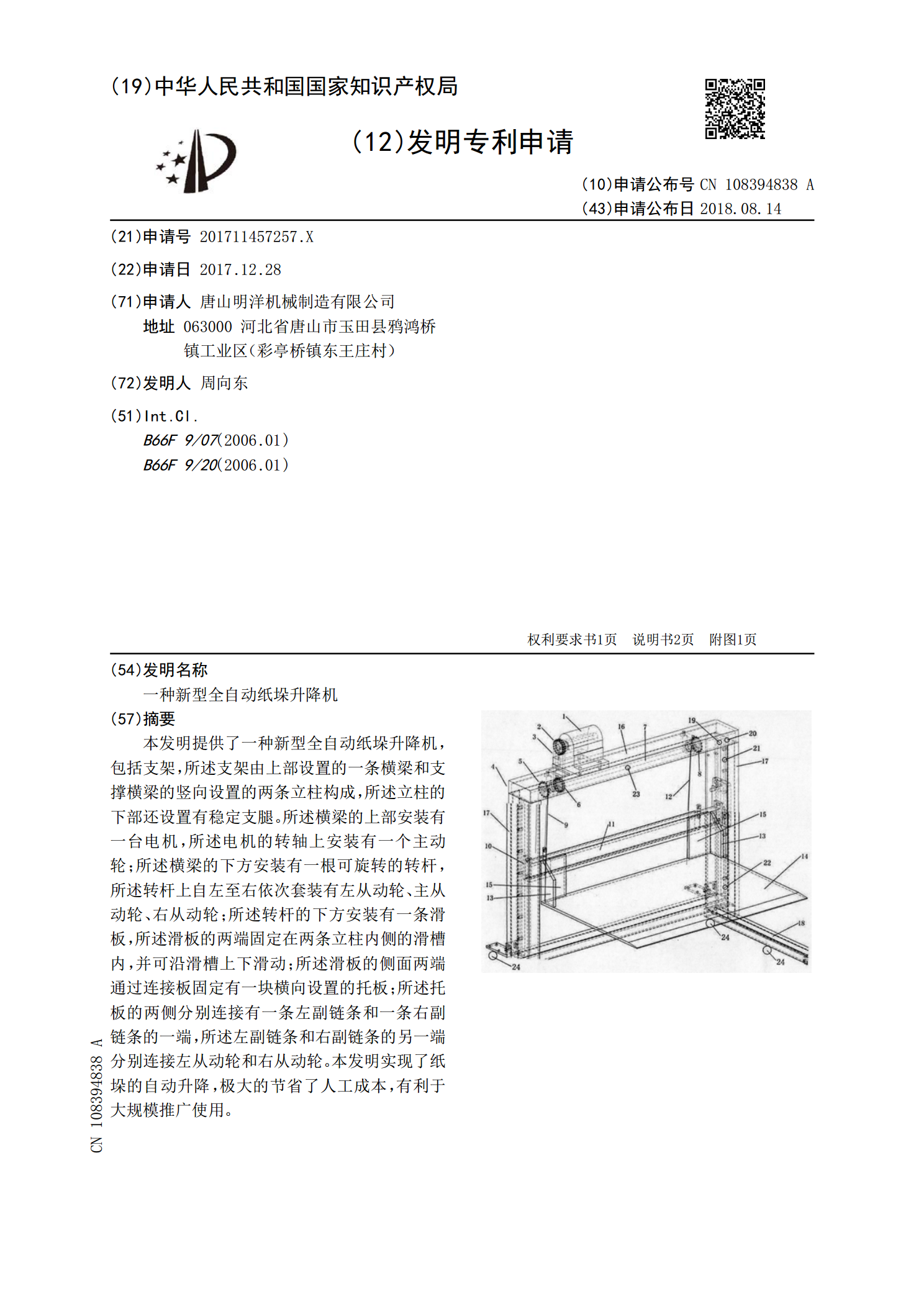
本发明提供了一种新型全自动纸垛升降机,包括支架,所述支架由上部设置的一条横梁和支撑横梁的竖向设置的两条立柱构成,所述立柱的下部还设置有稳定支腿。所述横梁的上部安装有一台电机,所述电机的转轴上安装有一个主动轮;所述横梁的下方安装有一根可旋转的转杆,所述转杆上自左至右依次套装有左从动轮、主从动轮、右从动轮;所述转杆的下方安装有一条滑板,所述滑板的两端固定在两条立柱内侧的滑槽内,并可沿滑槽上下滑动;所述滑板的侧面两端通过连接板固定有一块横向设置的托板;所述托板的两侧分别连接有一条左副链条和一条右副链条的一端,所
一种用于全自动电饭煲的锅盖升降机构.pdf
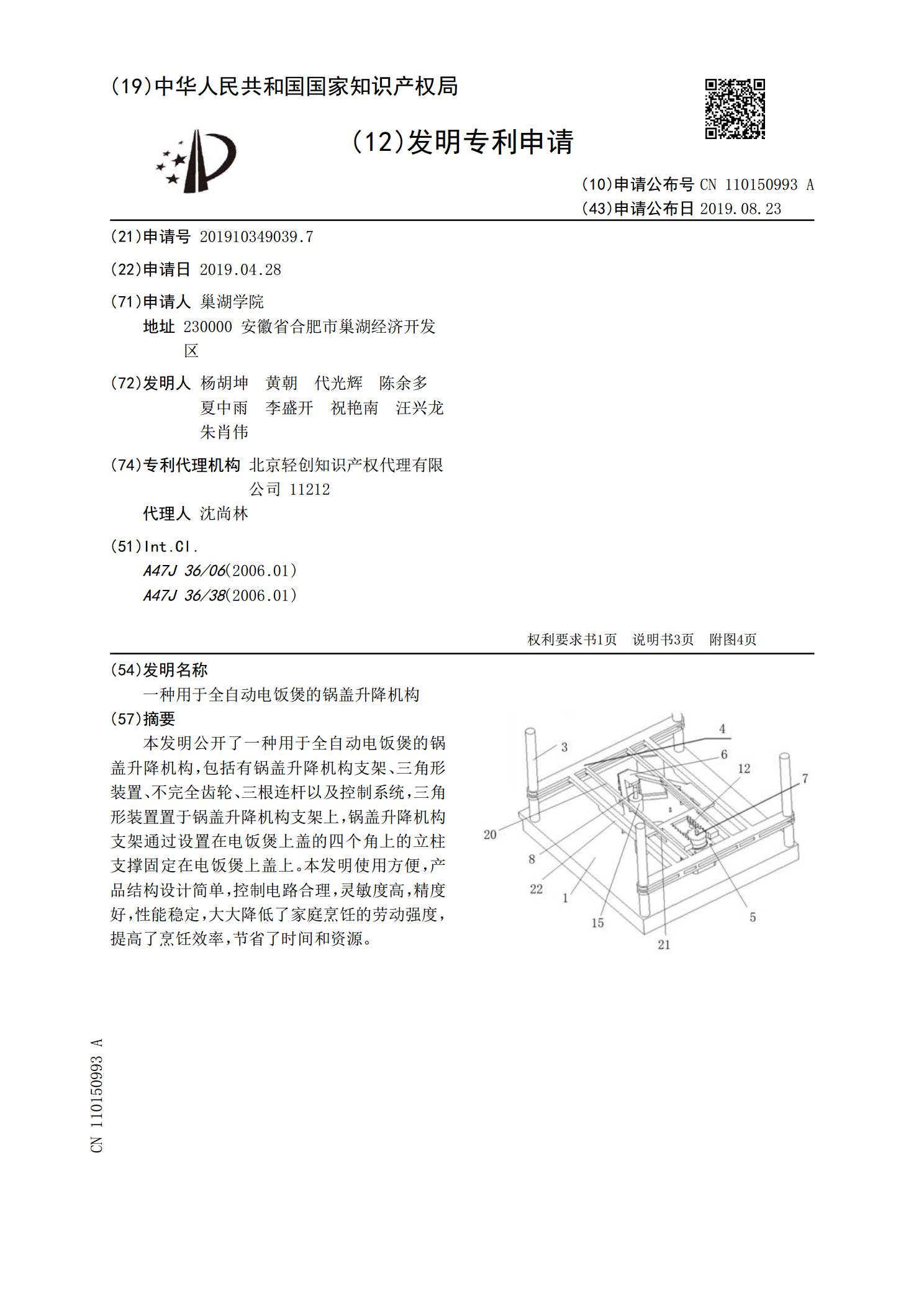
本发明公开了一种用于全自动电饭煲的锅盖升降机构,包括有锅盖升降机构支架、三角形装置、不完全齿轮、三根连杆以及控制系统,三角形装置置于锅盖升降机构支架上,锅盖升降机构支架通过设置在电饭煲上盖的四个角上的立柱支撑固定在电饭煲上盖上。本发明使用方便,产品结构设计简单,控制电路合理,灵敏度高,精度好,性能稳定,大大降低了家庭烹饪的劳动强度,提高了烹饪效率,节省了时间和资源。
一种新型全自动铝合金轮毂毛坯升降机构.pdf
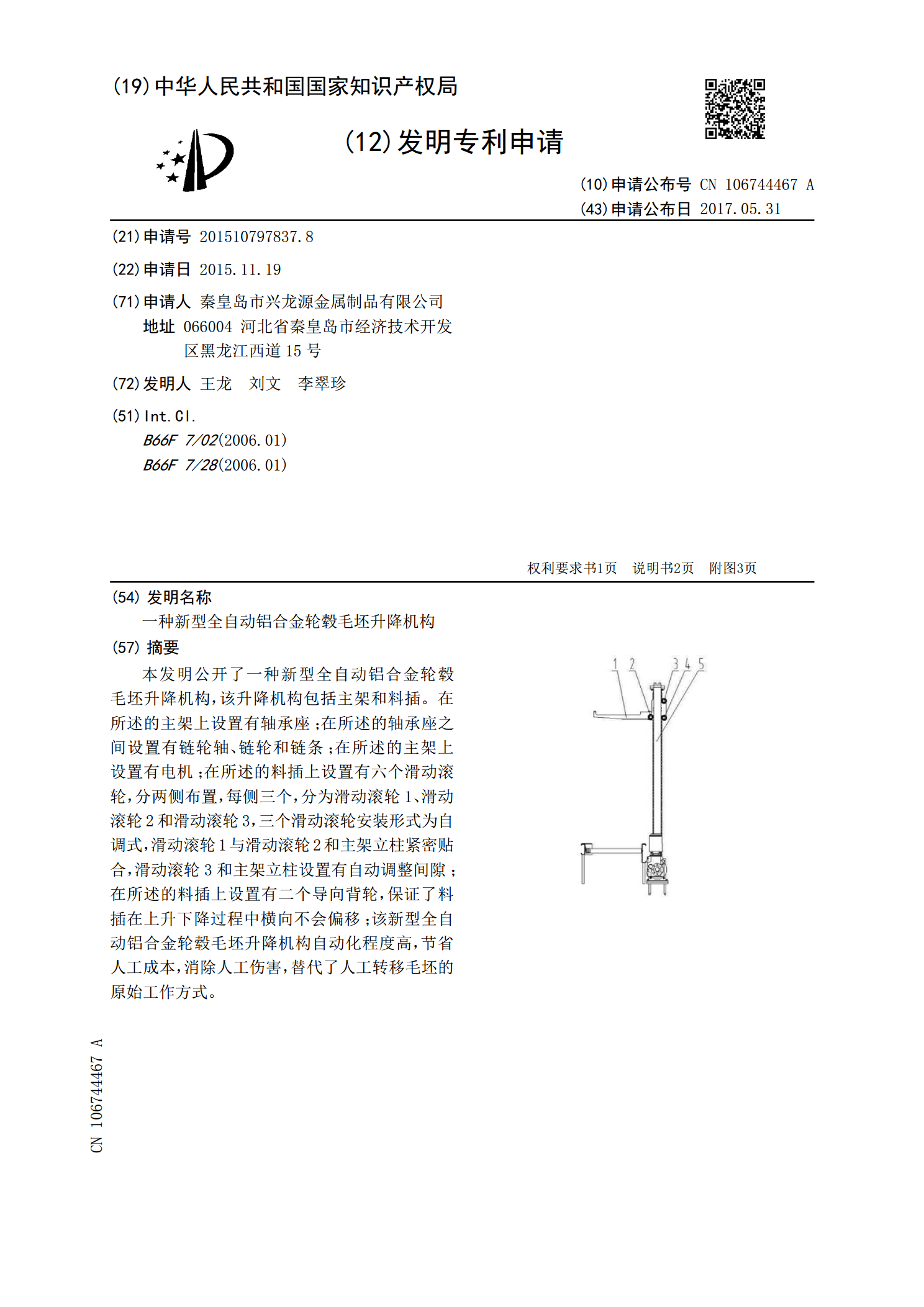
本发明公开了一种新型全自动铝合金轮毂毛坯升降机构,该升降机构包括主架和料插。在所述的主架上设置有轴承座;在所述的轴承座之间设置有链轮轴、链轮和链条;在所述的主架上设置有电机;在所述的料插上设置有六个滑动滚轮,分两侧布置,每侧三个,分为滑动滚轮1、滑动滚轮2和滑动滚轮3,三个滑动滚轮安装形式为自调式,滑动滚轮1与滑动滚轮2和主架立柱紧密贴合,滑动滚轮3和主架立柱设置有自动调整间隙;在所述的料插上设置有二个导向背轮,保证了料插在上升下降过程中横向不会偏移;该新型全自动铝合金轮毂毛坯升降机构自动化程度高,节省人

一种全自动收纸机翻纸笼升降机构.pdf
本发明公开了一种全自动收纸机翻纸笼升降机构,包括两组圆导轨,所述圆导轨上套设有翻纸笼,所述圆导轨顶部跨接设有链轮轴,右侧所述圆导轨顶部设有伺服电机,所述伺服电机通过链条传动连接于链轮轴,所述链轮轴两端均通过链条传动连接于翻纸笼。本发明采用伺服电机控制翻纸笼升降,具有升降速度快,传动平稳定位准确,升降冲击力小。