
轨道状态监视装置.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轨道状态监视装置.pdf
本发明提供一种轨道状态监视装置,该轨道状态监视装置具备:加速度检测部,所述加速度检测部设置在铁道车辆,并检测在所述铁道车辆的车轮上产生的加速度中的、至少车轴方向上的加速度;路轨位置枪测部,所述路轨位置检测部设置在所述铁道车辆,并检测对相对于所述车轮的、所述路轨在车轴方向上的位置进行表示的值;积分运算部,所述积分运算部运算基于二重积分值的值,所述二重积分值为由所述加速度检测部枪测的加速度的、二重积分值;减法运算部,所述减法运算部通过从由所述积分运算部运算的值中减去由所述路轨位置检测部检测的值,而将所述车轮的
设备状态监视装置及设备状态监视方法.pdf
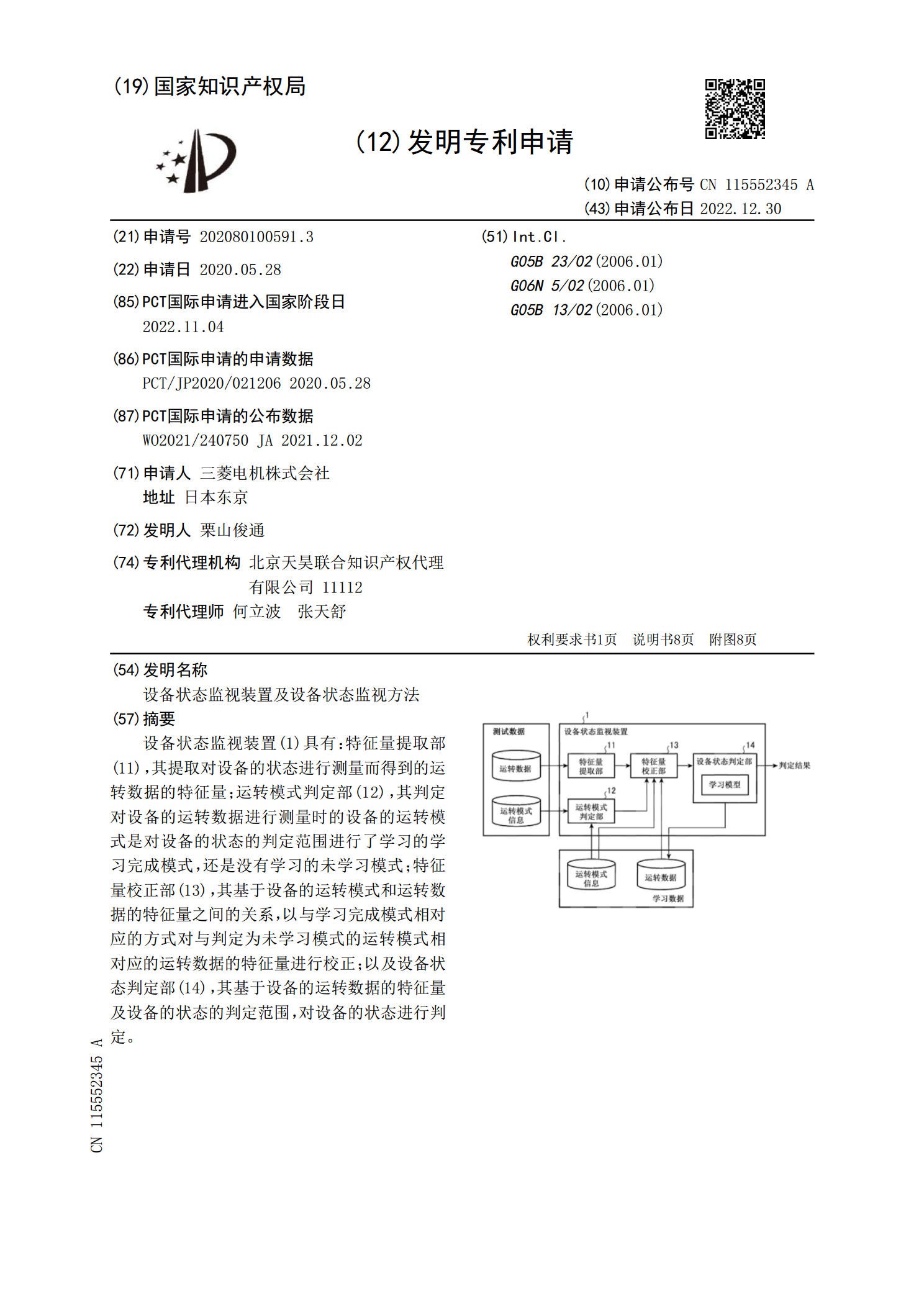
设备状态监视装置(1)具有:特征量提取部(11),其提取对设备的状态进行测量而得到的运转数据的特征量;运转模式判定部(12),其判定对设备的运转数据进行测量时的设备的运转模式是对设备的状态的判定范围进行了学习的学习完成模式,还是没有学习的未学习模式;特征量校正部(13),其基于设备的运转模式和运转数据的特征量之间的关系,以与学习完成模式相对应的方式对与判定为未学习模式的运转模式相对应的运转数据的特征量进行校正;以及设备状态判定部(14),其基于设备的运转数据的特征量及设备的状态的判定范围,对设备的状态进行
齿轮装置的状态监视系统以及状态监视方法.pdf
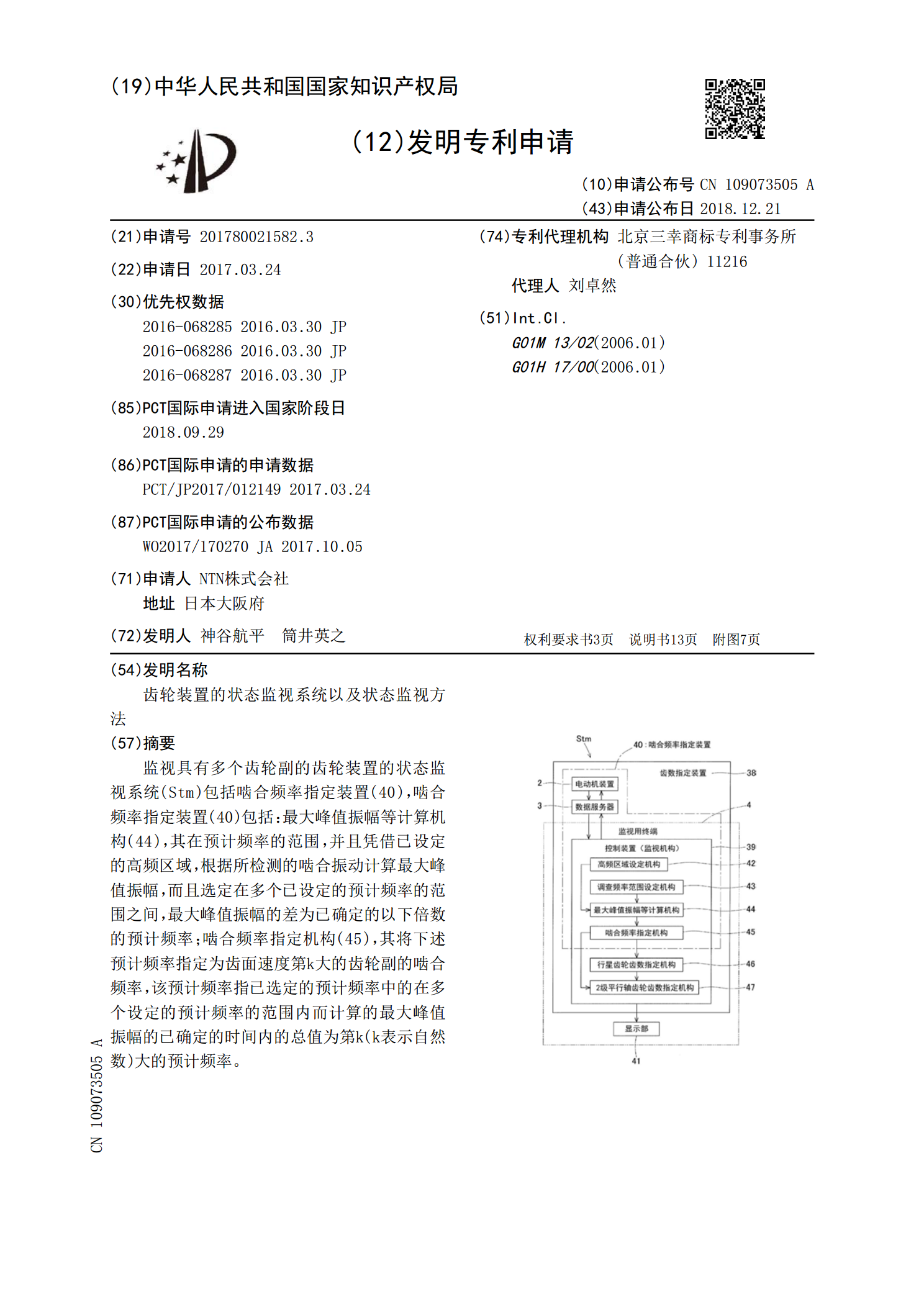
监视具有多个齿轮副的齿轮装置的状态监视系统(Stm)包括啮合频率指定装置(40),啮合频率指定装置(40)包括:最大峰值振幅等计算机构(44),其在预计频率的范围,并且凭借已设定的高频区域,根据所检测的啮合振动计算最大峰值振幅,而且选定在多个已设定的预计频率的范围之间,最大峰值振幅的差为已确定的以下倍数的预计频率;啮合频率指定机构(45),其将下述预计频率指定为齿面速度第k大的齿轮副的啮合频率,该预计频率指已选定的预计频率中的在多个设定的预计频率的范围内而计算的最大峰值振幅的已确定的时间内的总值为第k(k
轮胎状态监视装置.pdf
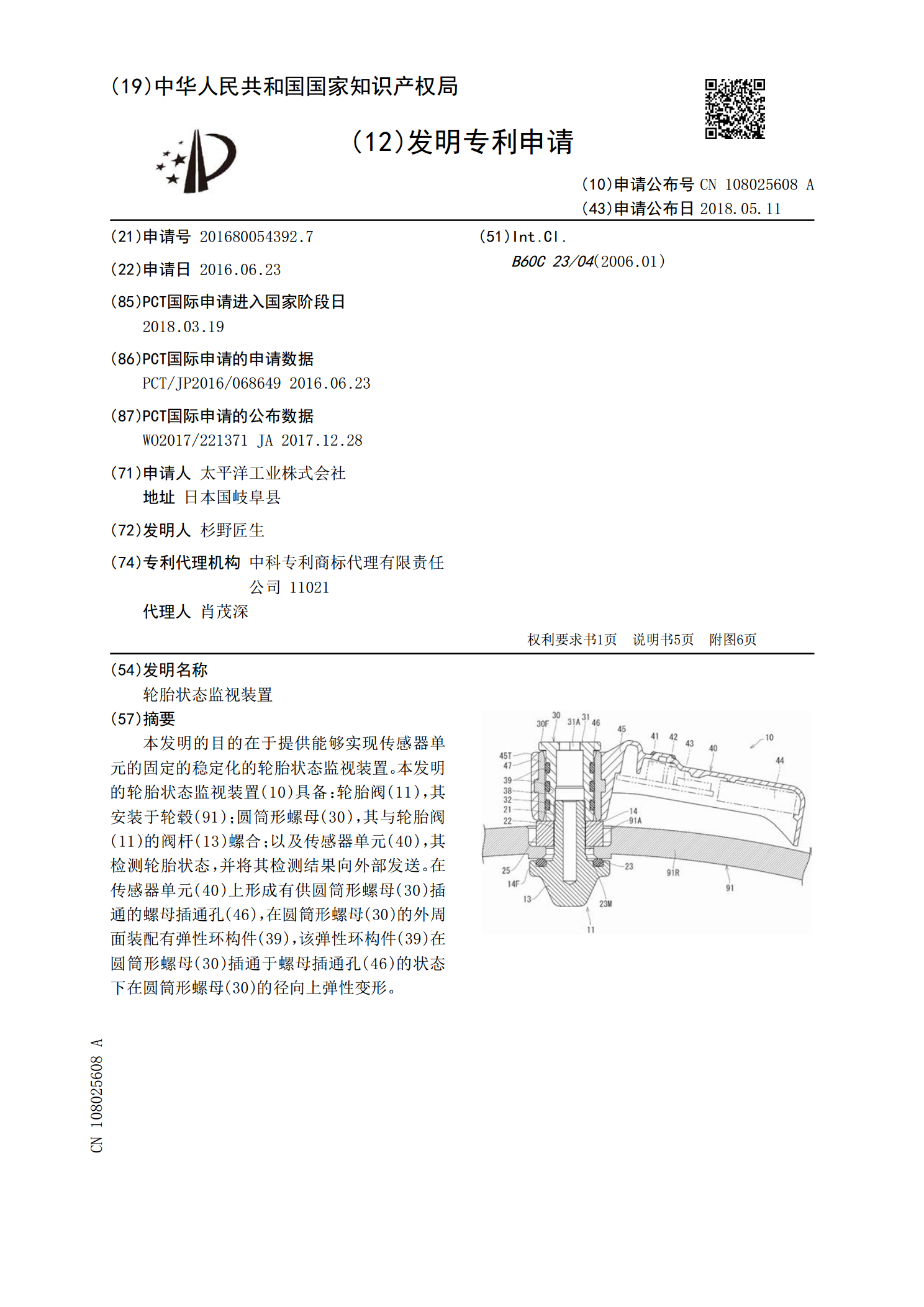
本发明的目的在于提供能够实现传感器单元的固定的稳定化的轮胎状态监视装置。本发明的轮胎状态监视装置(10)具备:轮胎阀(11),其安装于轮毂(91);圆筒形螺母(30),其与轮胎阀(11)的阀杆(13)螺合;以及传感器单元(40),其检测轮胎状态,并将其检测结果向外部发送。在传感器单元(40)上形成有供圆筒形螺母(30)插通的螺母插通孔(46),在圆筒形螺母(30)的外周面装配有弹性环构件(39),该弹性环构件(39)在圆筒形螺母(30)插通于螺母插通孔(46)的状态下在圆筒形螺母(30)的径向上弹性变形。
轮胎状态监视系统以及监视装置.pdf
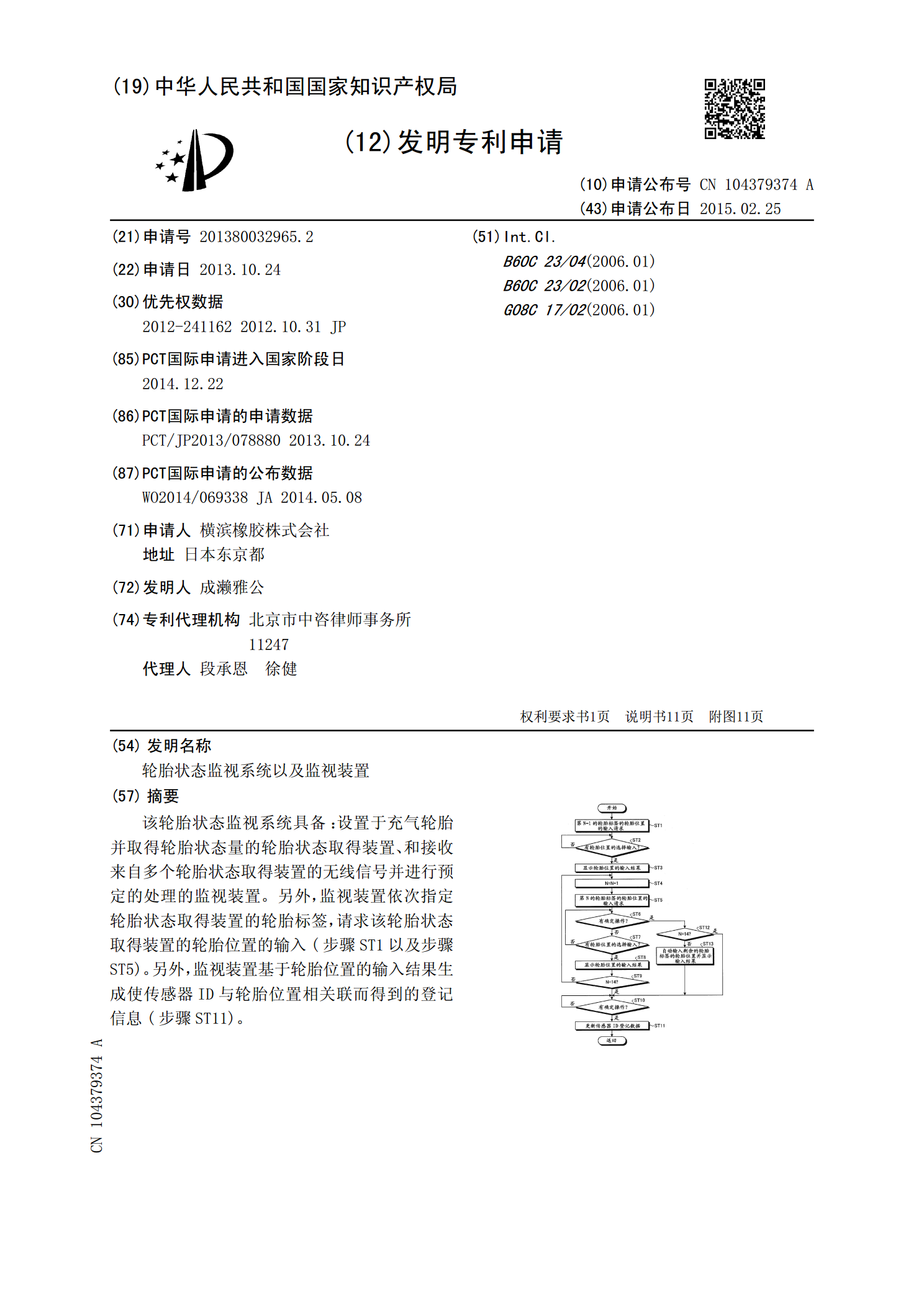
该轮胎状态监视系统具备:设置于充气轮胎并取得轮胎状态量的轮胎状态取得装置、和接收来自多个轮胎状态取得装置的无线信号并进行预定的处理的监视装置。另外,监视装置依次指定轮胎状态取得装置的轮胎标签,请求该轮胎状态取得装置的轮胎位置的输入(步骤ST1以及步骤ST5)。另外,监视装置基于轮胎位置的输入结果生成使传感器ID与轮胎位置相关联而得到的登记信息(步骤ST11)。