
用于微创手术的腹腔内牵拉手术机器人.pdf

盼易****君a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于微创手术的腹腔内牵拉手术机器人.pdf
用于微创手术的腹腔内牵拉手术机器人,它涉及一种用于微创手术的机器人,以解决现有手术器械在进行手术过程中易发生干扰,同时手术过程总手术器械的移动灵活性和自由性较差以及现有手术机器人体积大、价格昂贵的问题,它包括壳体、摆动机构、伸缩机构和夹持机构;摆动机构包括第一电机、第一锥齿轮、第二锥齿轮和肩部转动连杆;伸缩机构包括第二电机、第一圆柱齿轮、第二圆柱齿轮、第一丝杠副和套筒;夹持机构包括第三电机、第二丝杠副、第一连杆、第二连杆、第三连杆和钳子;壳体内布置有摆动机构、伸缩机构和夹持机构。本发明用于微创手术。

用于微创手术的腹腔内磁锚定夹持手术机器人.pdf
用于微创手术的腹腔内磁锚定夹持手术机器人,它涉及一种用于微创手术的机器人,以解决现有腹腔微创手术过程中,手术医生直接手持手术器械操作影响手术的精度和质量,以及现有手术机器人成本高、占用体积大,移动自由性较差的问题,它包括机械结构单元和电控单元;机械结构单元包括壳体、第一蜗杆、第二蜗杆、蜗轮、齿条、永磁铁、悬挂基座和夹持机构;夹持机构包括第三电机、丝杠副、第一连杆、第二连杆、第三连杆和钳子;电控单元包括第一电机、第二电机、控制电路模块和无线收发模块;壳体的内侧壁上镶嵌有控制电路模块和无线收发模块,壳体内布置

用于腹腔微创手术的视觉机器人.pdf
用于腹腔微创手术的视觉机器人,它涉及一种视觉机器人,以解决现有手持或头戴的视觉手术器械在进行手术时,存在易受医生情绪和疲劳程度影响,智能化程度较低,手术精度和质量差,以及基于机器人技术的智能化视觉手术机器人系统价格昂贵、成本高、灵活性和自由性较差的问题,它包括壳体和清洁基体;它还包括三段轴结构、悬挂支架、电机、曲柄滑块机构、摄像头模块、无线收发模块、中枢控制电路模块、两个永磁铁、两个固定轴和多个LED灯;三段轴结构包括第一传动轴、第二传动轴、第三传动轴、弹簧和方形键;曲柄滑块机构包括驱动轴、曲柄、连杆、滑
一种用于微创手术机器人的手术器械及微创手术机器人.pdf
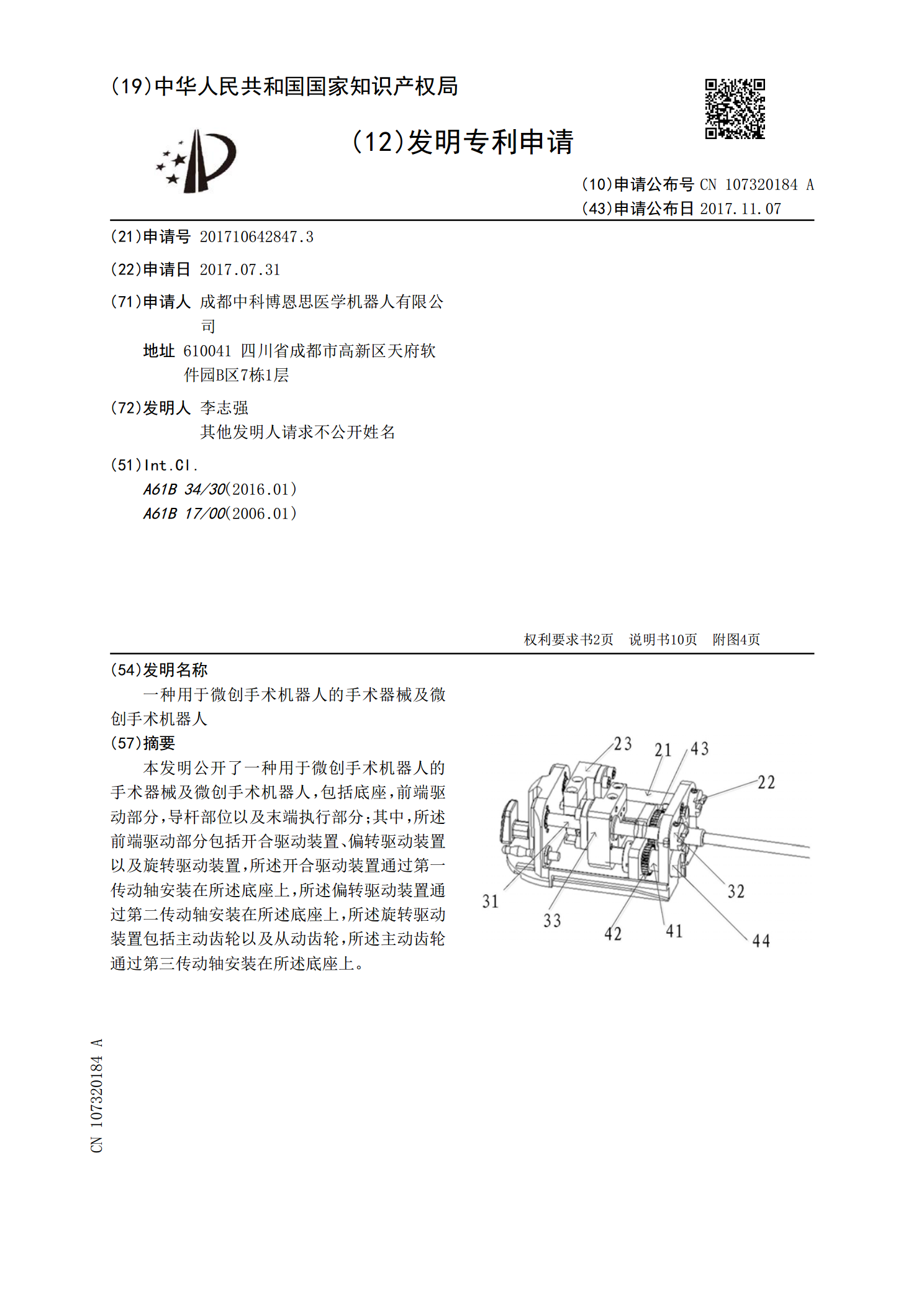
本发明公开了一种用于微创手术机器人的手术器械及微创手术机器人,包括底座,前端驱动部分,导杆部位以及末端执行部分;其中,所述前端驱动部分包括开合驱动装置、偏转驱动装置以及旋转驱动装置,所述开合驱动装置通过第一传动轴安装在所述底座上,所述偏转驱动装置通过第二传动轴安装在所述底座上,所述旋转驱动装置包括主动齿轮以及从动齿轮,所述主动齿轮通过第三传动轴安装在所述底座上。

腹腔微创手术机器人虚拟手术仿真系统研究.docx
腹腔微创手术机器人虚拟手术仿真系统研究腹腔微创手术机器人虚拟手术仿真系统研究随着科技的不断发展,手术也在不断地进步和创新。腹腔微创手术机器人虚拟手术仿真系统的出现,为手术操作提供了全新的解决方案,也为医生的培训提供了新的途径。本文将对该系统进行探讨和分析。一、腹腔微创手术机器人的发展腹腔微创手术作为一种新型的手术方式,是指通过小切口或管道将手术器械引入腹腔,然后进行手术。相比传统手术,腹腔微创手术优势明显,营养不良、年老体弱、心肺功能不良等患者也可以进行手术,创伤小、术后恢复快等。但是,腹腔微创手术操作难