
多频连续波系统的聚焦成像校准方法.pdf

静芙****可爱


1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多频连续波系统的聚焦成像校准方法.pdf
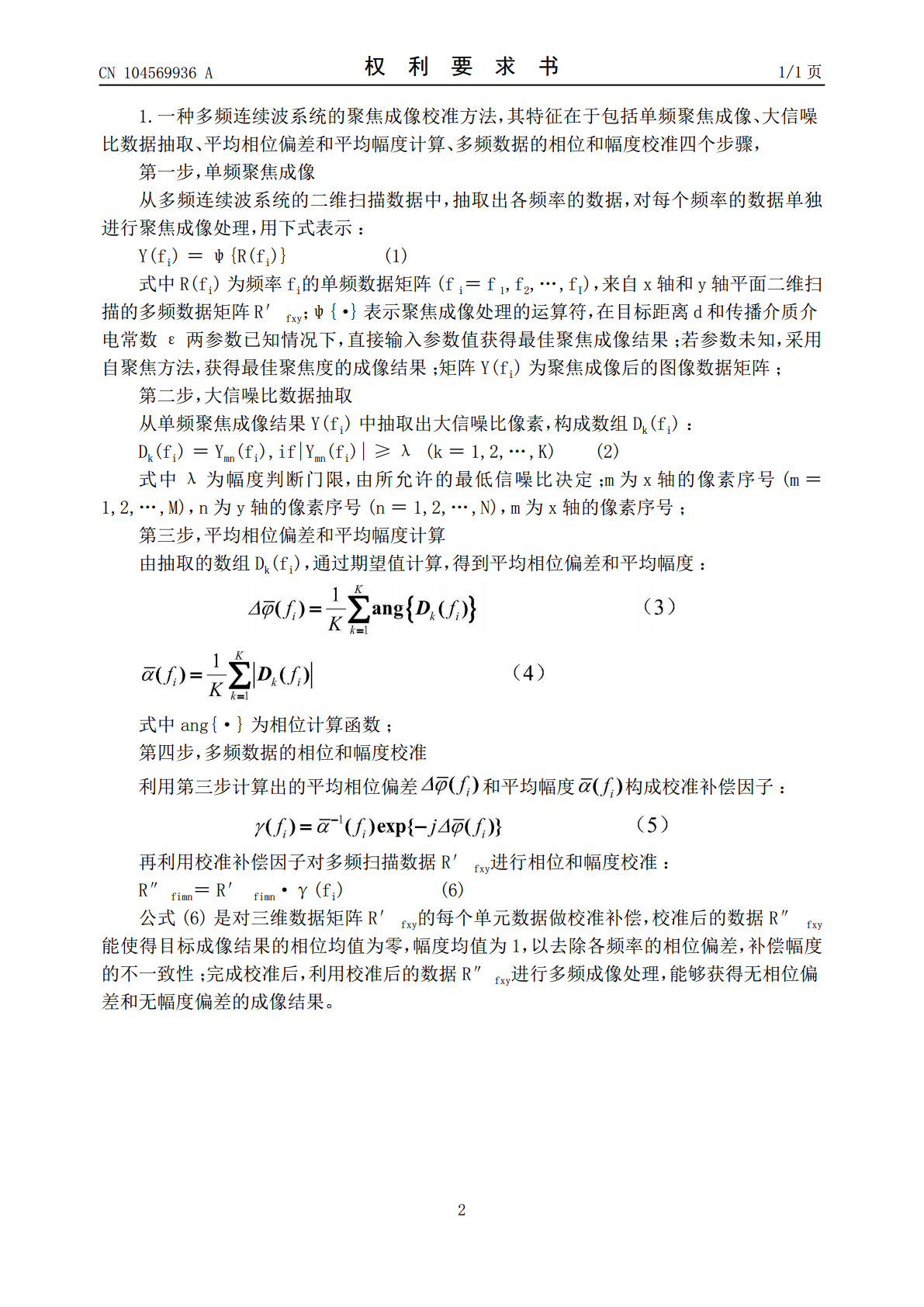
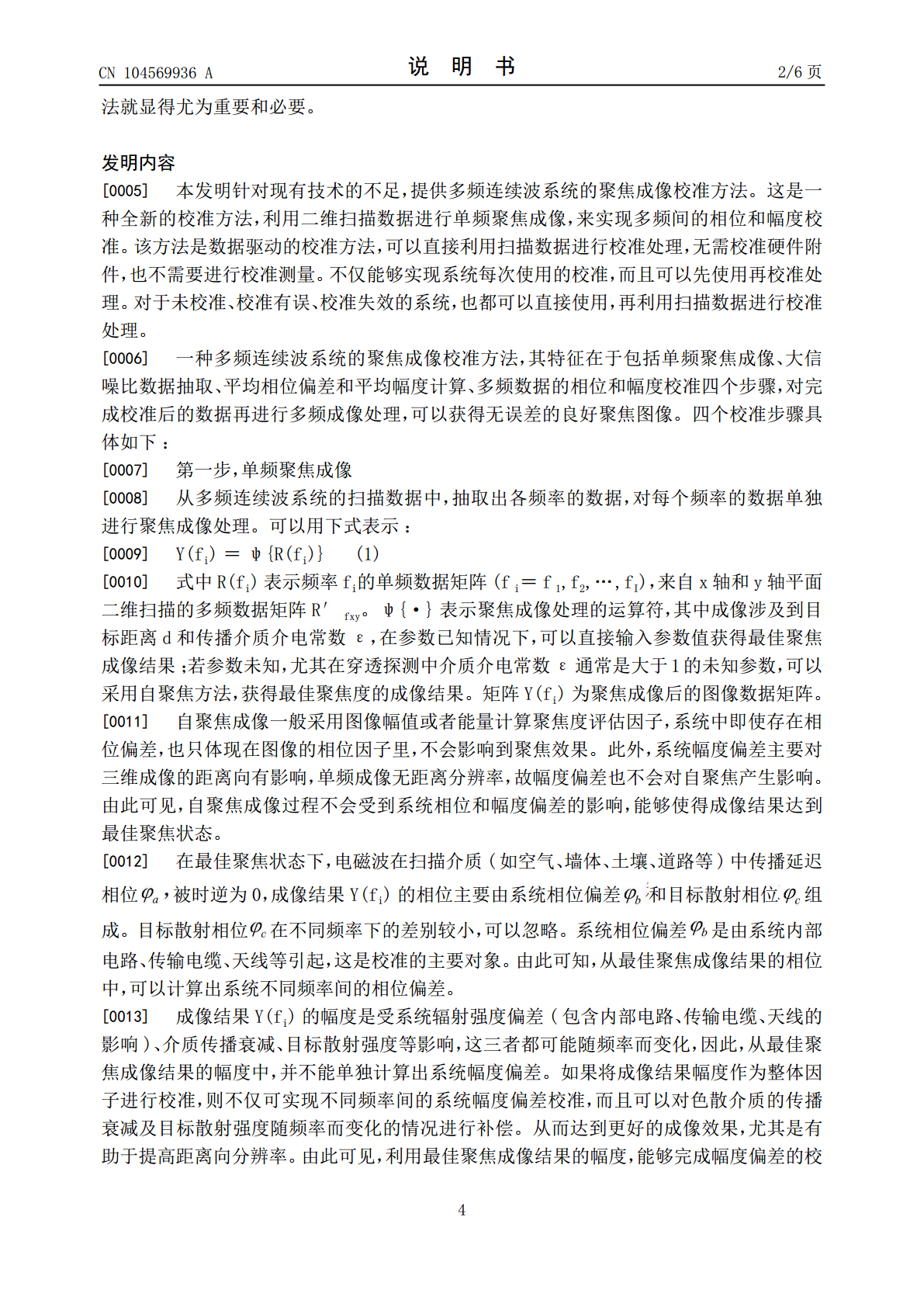
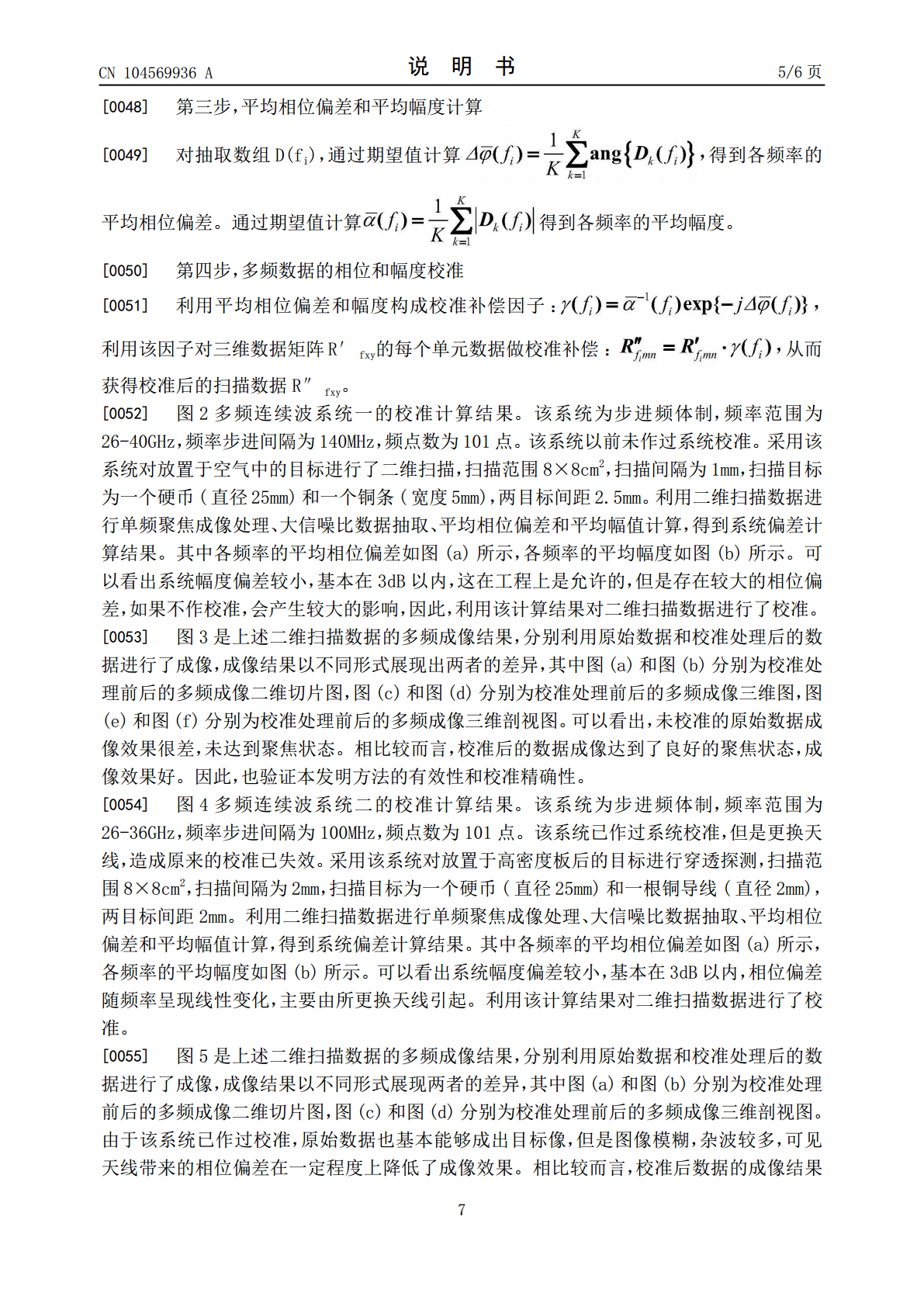
本发明提供了一种多频连续波系统聚焦成像校准方法,从多频连续波系统的二维扫描数据中,抽取出各频率数据,先进行单频聚焦成像,获得最佳聚焦图像。在此图像上抽取大信噪比像素数据,计算出平均相位偏差和平均幅度。再利用计算结果构成校准补偿因子,对多频数据进行相位和幅度校准。校准后的数据进行多频成像处理,能够获得良好的聚焦成像效果,目标轮廓更清晰,背景杂波更少,信噪比有效提高。由于所利用的数据多,信息丰富,校准精度高。发明是数据驱动的校准方法,无需校准硬件附件,也不需要进行复杂的校准测量。

超声连续波多普勒成像系统.pdf
本申请公开了一种超声连续波多普勒成像系统,包括探头、发射单元、接收单元、切换电路和控制器,探头阵元包括第一阵元组和第二阵元组,切换电路连接在阵元与发射通道或接收通道之间,控制器的输出端耦合至切换电路,控制切换电路的状态切换,使第一阵元组连接到发射通道和接收通道中的一个,使第二阵元组连接到发射通道和接收通道中的另一个,且每间隔设定时间使第一阵元组和第二阵元组互换连接通道,从而使第一阵元组和第二阵元组交替发射和接收,使得探头阵元发热存在一个散热的过程,进而可控制探头局部温度持续升高,而提高探头发射电压提供了条

一种多通道调频连续波SAR成像方法.pdf
本发明提供一种多通道调频连续波SAR成像方法。技术方案包括以下步骤:①利用一个通道发射调频连续波信号,其它M个通道同时接收,获得M路方位向欠采样的二维调频连续波SAR回波信号;②对上述所获取的M路信号进行二维傅里叶变换,在二维频域进行多普勒解模糊,得到消除方位向混叠的等效单通道信号;③对二维频域的等效单通道信号进行聚焦处理,得到二维高分辨率调频连续波SAR图像。与现有的单通道调频连续波SAR相比,在相同的发射功率条件下,采用本发明所提供的方法,能够工作在更远的作用距离、更宽的测绘带宽度和更高的成像分辨率模
磁性粒子成像系统的校准方法.pdf
本发明公开了一种校准由磁场发生器和测量装置组成的磁性粒子成像系统的方法,其提出了一种编码校准场景,该编码校准场景包含分布在其体积内的多个纳米粒子样品,该编码校准场景大于该场景所在的视场。在视场上,向一个或多个方向上线性移动和/或在一个或多个轴上旋转该场景,并且进一步地,本发明也公开了一种用于移动编码校准场景的机械系统。

一种快速准连续多光谱成像系统及其成像方法.pdf
一种快速准连续多光谱成像系统,包括高速相机、准连续分光装置和扫描驱动机构,其特征在于:所述扫描驱动机构由步进电机及单片机控制的霍尔传感器组成,步进电机控制滤光片轮的旋转及停留时间,单片机控制的霍尔传感器配合步进电机控制滤光片轮的定位和复位;所述的准连续分光装置通过卡口配合设置在高速相机的机身与成像镜头之间,在所述的扫描驱动机构驱动下,对通过相机镜头进入相机机身内的光线进行处理,获得准连续的单色光,并依次聚焦到成像传感器上,获得一系列准连续的光谱图像,经图像融合后获得待测目标的准连续多光谱图像。