
磁性粒子成像系统的校准方法.pdf

邻家****文章

1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
磁性粒子成像系统的校准方法.pdf
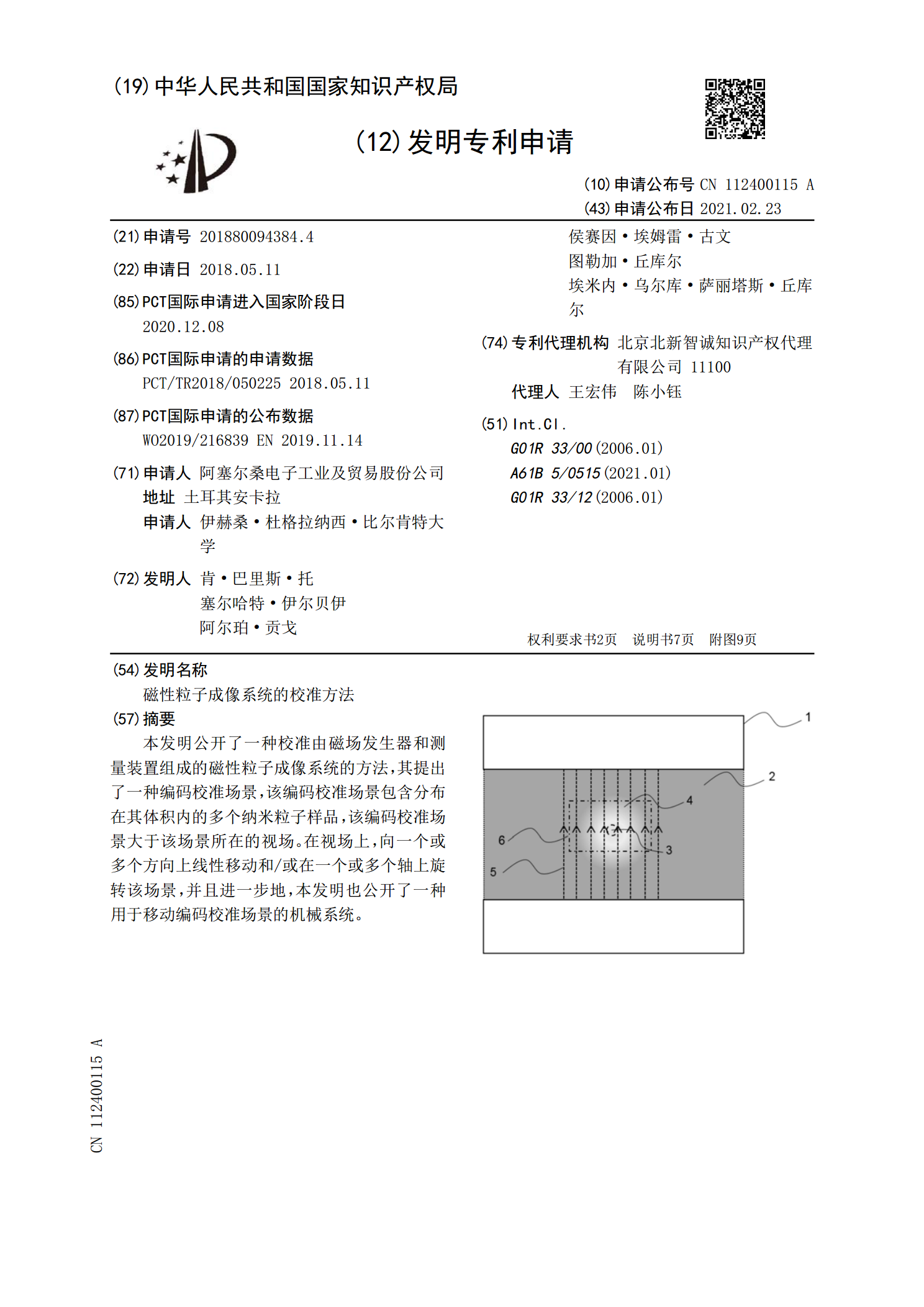
本发明公开了一种校准由磁场发生器和测量装置组成的磁性粒子成像系统的方法,其提出了一种编码校准场景,该编码校准场景包含分布在其体积内的多个纳米粒子样品,该编码校准场景大于该场景所在的视场。在视场上,向一个或多个方向上线性移动和/或在一个或多个轴上旋转该场景,并且进一步地,本发明也公开了一种用于移动编码校准场景的机械系统。

基于系统矩阵优化的二维磁性粒子成像研究.docx
基于系统矩阵优化的二维磁性粒子成像研究基于系统矩阵优化的二维磁性粒子成像研究摘要磁性粒子成像技术在生物医学领域具有广泛的应用前景,可用于诊断、治疗和监测疾病。然而,现有方法存在成像时间长、信噪比低以及空间分辨率不高等问题。为了解决这些问题,本论文提出了一种基于系统矩阵优化的二维磁性粒子成像方法。首先,本文介绍了二维磁性粒子成像的原理。磁性粒子成像是基于磁共振技术的一种成像方法,通过磁场梯度作用于磁性粒子,测量磁性粒子的位置信息。然后,本文详细介绍了系统矩阵优化的理论基础。系统矩阵是一种用于描述成像系统的矩

多频连续波系统的聚焦成像校准方法.pdf
本发明提供了一种多频连续波系统聚焦成像校准方法,从多频连续波系统的二维扫描数据中,抽取出各频率数据,先进行单频聚焦成像,获得最佳聚焦图像。在此图像上抽取大信噪比像素数据,计算出平均相位偏差和平均幅度。再利用计算结果构成校准补偿因子,对多频数据进行相位和幅度校准。校准后的数据进行多频成像处理,能够获得良好的聚焦成像效果,目标轮廓更清晰,背景杂波更少,信噪比有效提高。由于所利用的数据多,信息丰富,校准精度高。发明是数据驱动的校准方法,无需校准硬件附件,也不需要进行复杂的校准测量。

平面MIMO阵列成像系统校准方法研究.docx
平面MIMO阵列成像系统校准方法研究1.前言MIMO技术是一种最近流行的无线通信技术,它使用多个天线来传输和接收数据。MIMO技术已被广泛应用于无线通信领域,包括移动通信、卫星通信、雷达和防御等领域。MIMO系统需要进行校准,以确保信号的传输和接收的准确性。本文将探讨平面MIMO阵列成像系统的校准方法。2.平面MIMO阵列成像系统介绍平面MIMO阵列成像系统是一种基于MIMO技术的成像系统,用于成像目标的位置和形状。平面MIMO阵列成像系统由一组发射和接收天线构成,它们可以同时接收和发射信号。这种系统利用

医学成像系统、偏转单元和用于校准医学成像系统的方法.pdf
本发明涉及用于对对象进行成像的医学成像系统(1)、用于医学成像系统的偏转单元(20)以及用于校准医学成像系统的方法,所述医学成像系统(1)包括:成像单元(10),所述成像单元(10)包括至少一个成像装置(11);以及偏转单元(20),所述偏转单元(20)包括至少一个成像偏转构件(21a),其中,至少一个成像偏转构件(21a)被配置成选择性地设置在成像装置(11)的光学路径中以将成像光束选择性地偏转。