
一种新型人工手柔性传动操纵机构.pdf

曦晨****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型人工手柔性传动操纵机构.pdf
本发明公开了一种新型人工手柔性传动操纵机构,由行星轮机构、切换机构、人工手、手夹组成;其中,行星轮机构中行星轮采用双联行星齿轮,太阳轮直接与输入轴配合作为输入端,内齿轮固定在人工手的壳体上,行星架作为输出端与套筒固连;在切换机构中,切换机构外圈通过螺钉直接与套筒固定连接作为输入端,滚轮和输出轴配合作为输出端,拨叉通过导向柱连接在切换机构上,通过弧形推杆和弹簧的共同作用,导向柱沿滑行槽滑动,带动人工手柔性开合,实现可靠、柔性、连续的切换。人工手柔性传动操纵机构,采用双联行星轮传动,在满足传动比要求的前提下最

一种面向机械手的双向柔性传动机构.pdf
本发明公开了一种面向机械手的双向柔性传动机构,属于机械技术领域,其包括:电机、刚性轮毂、柔性栅栏、第一传动绳索、第二传动绳索及机械手指;电机安装于机械手掌内部,且电机的轴穿过刚性轮毂的中心轴;柔性栅栏布置于刚性轮毂的外侧;第一传动绳索由刚性轮毂引出,穿过柔性栅栏后,分别穿过机械手指的各指节,并连接于机械手指的收缩端,并在刚性轮毂旋转时缠绕在柔性栅栏上;第二传动绳索由刚性轮毂引出后,分别穿过机械手指的各指节,连接于机械手指的复位端,且第二传动绳索在刚性轮毂旋转时以和第一传动绳索相反的旋向缠绕于刚性轮毂上。本
一种柔性传动调节机构.pdf
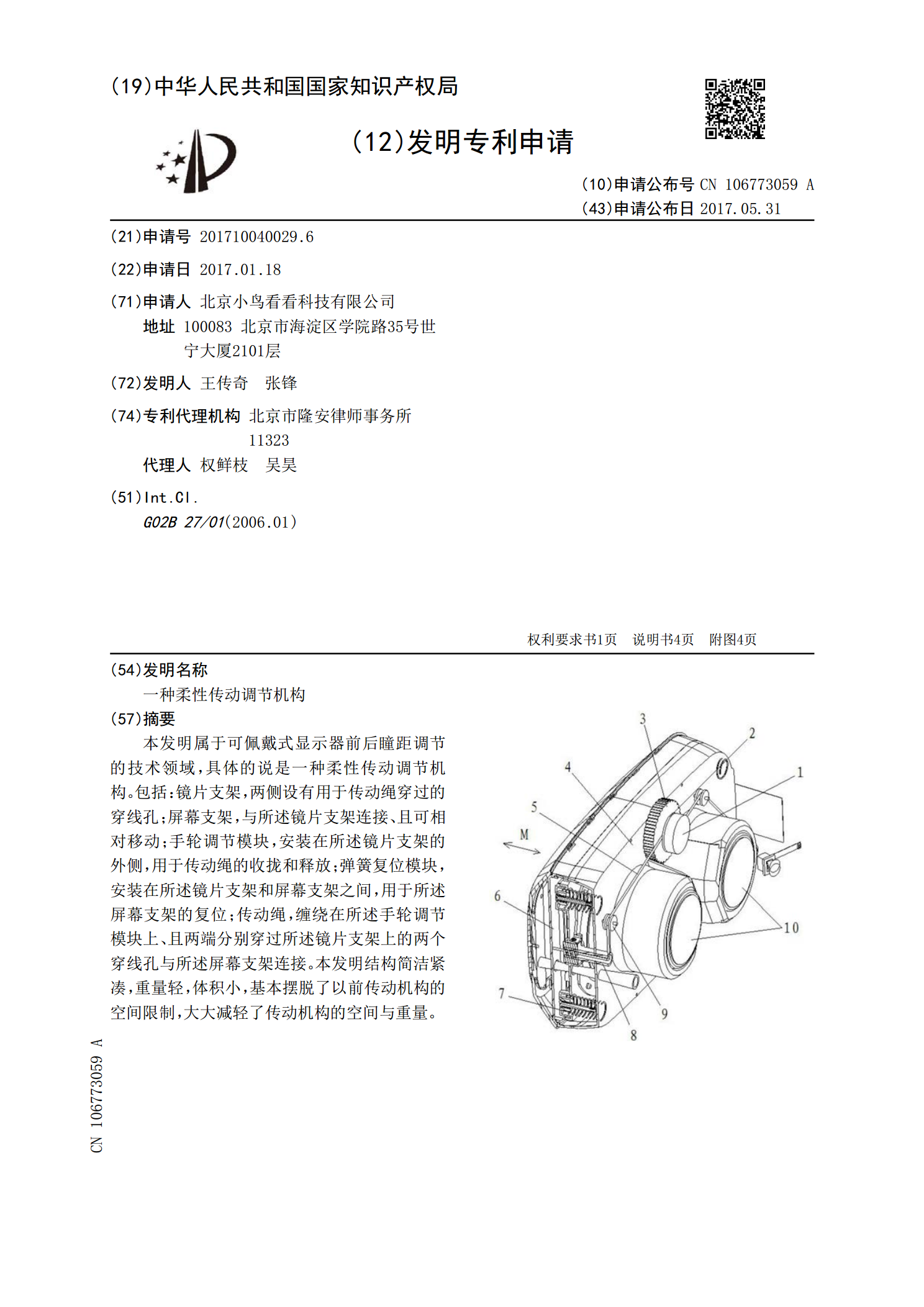
本发明属于可佩戴式显示器前后瞳距调节的技术领域,具体的说是一种柔性传动调节机构。包括:镜片支架,两侧设有用于传动绳穿过的穿线孔;屏幕支架,与所述镜片支架连接、且可相对移动;手轮调节模块,安装在所述镜片支架的外侧,用于传动绳的收拢和释放;弹簧复位模块,安装在所述镜片支架和屏幕支架之间,用于所述屏幕支架的复位;传动绳,缠绕在所述手轮调节模块上、且两端分别穿过所述镜片支架上的两个穿线孔与所述屏幕支架连接。本发明结构简洁紧凑,重量轻,体积小,基本摆脱了以前传动机构的空间限制,大大减轻了传动机构的空间与重量。
一种新型传动机构.pdf
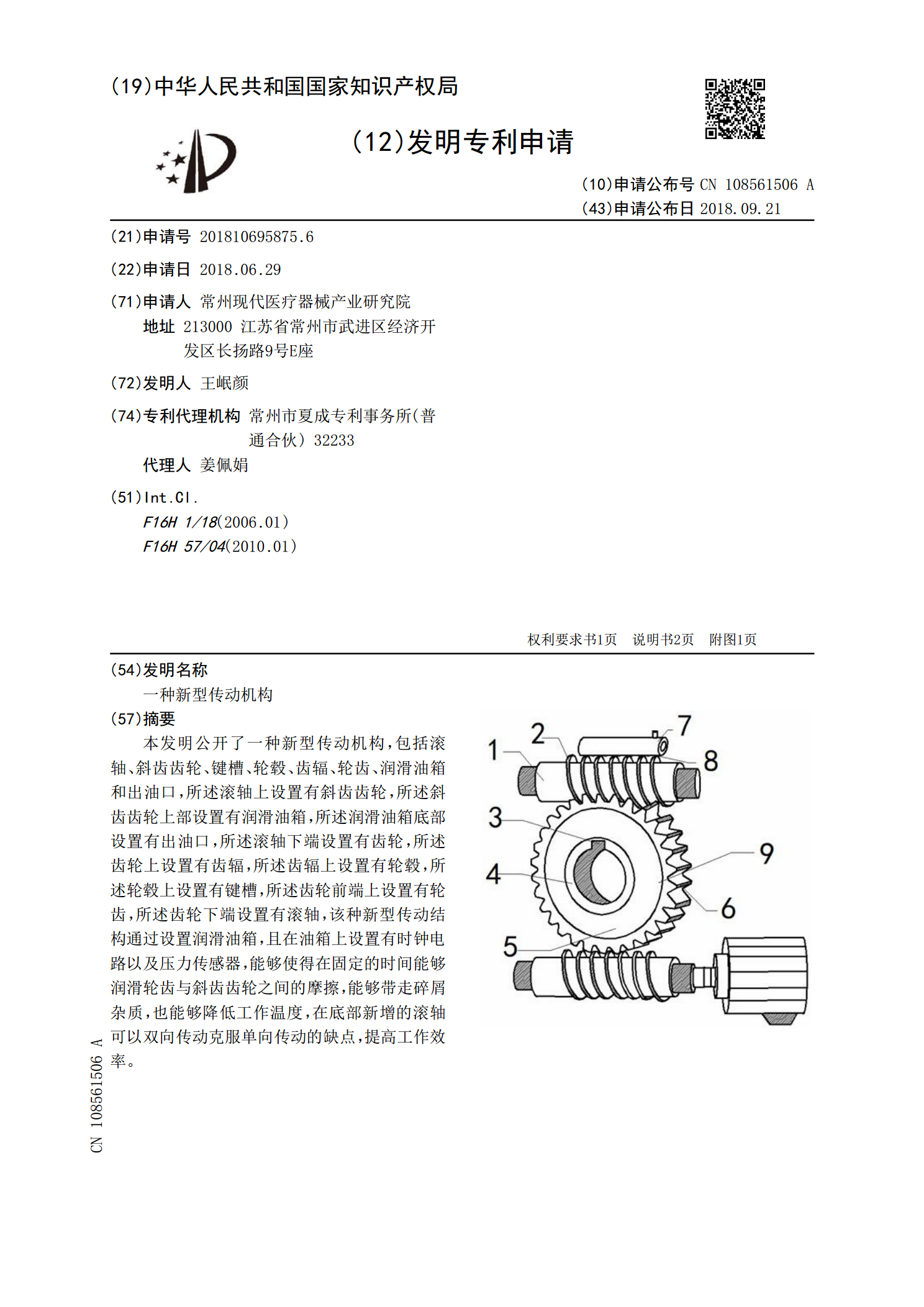
本发明公开了一种新型传动机构,包括滚轴、斜齿齿轮、键槽、轮毂、齿辐、轮齿、润滑油箱和出油口,所述滚轴上设置有斜齿齿轮,所述斜齿齿轮上部设置有润滑油箱,所述润滑油箱底部设置有出油口,所述滚轴下端设置有齿轮,所述齿轮上设置有齿辐,所述齿辐上设置有轮毂,所述轮毂上设置有键槽,所述齿轮前端上设置有轮齿,所述齿轮下端设置有滚轴,该种新型传动结构通过设置润滑油箱,且在油箱上设置有时钟电路以及压力传感器,能够使得在固定的时间能够润滑轮齿与斜齿齿轮之间的摩擦,能够带走碎屑杂质,也能够降低工作温度,在底部新增的滚轴可以双向
一种新型传动机构.pdf
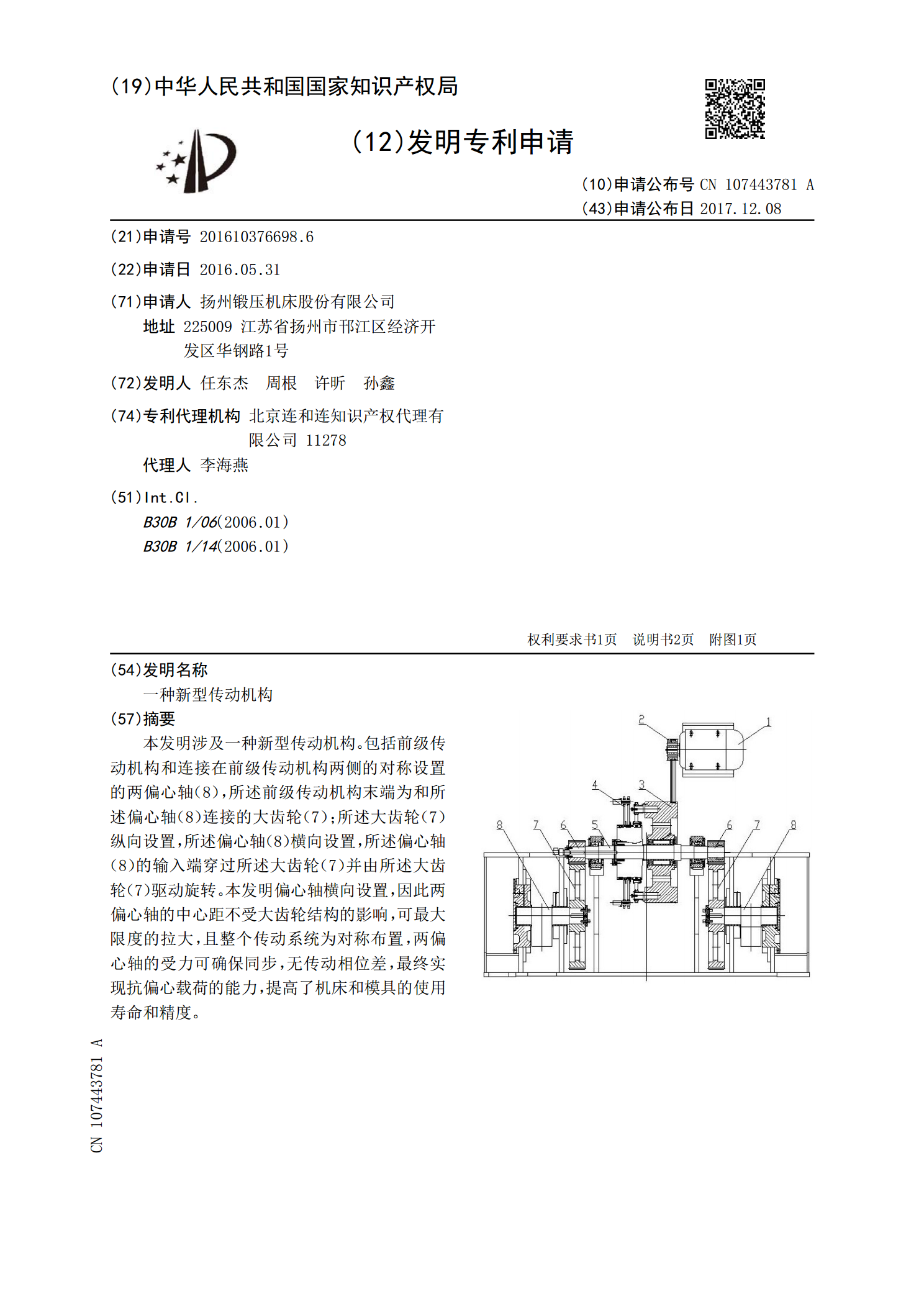
本发明涉及一种新型传动机构。包括前级传动机构和连接在前级传动机构两侧的对称设置的两偏心轴(8),所述前级传动机构末端为和所述偏心轴(8)连接的大齿轮(7);所述大齿轮(7)纵向设置,所述偏心轴(8)横向设置,所述偏心轴(8)的输入端穿过所述大齿轮(7)并由所述大齿轮(7)驱动旋转。本发明偏心轴横向设置,因此两偏心轴的中心距不受大齿轮结构的影响,可最大限度的拉大,且整个传动系统为对称布置,两偏心轴的受力可确保同步,无传动相位差,最终实现抗偏心载荷的能力,提高了机床和模具的使用寿命和精度。