
一种面向机械手的双向柔性传动机构.pdf

是你****晨呀

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种面向机械手的双向柔性传动机构.pdf
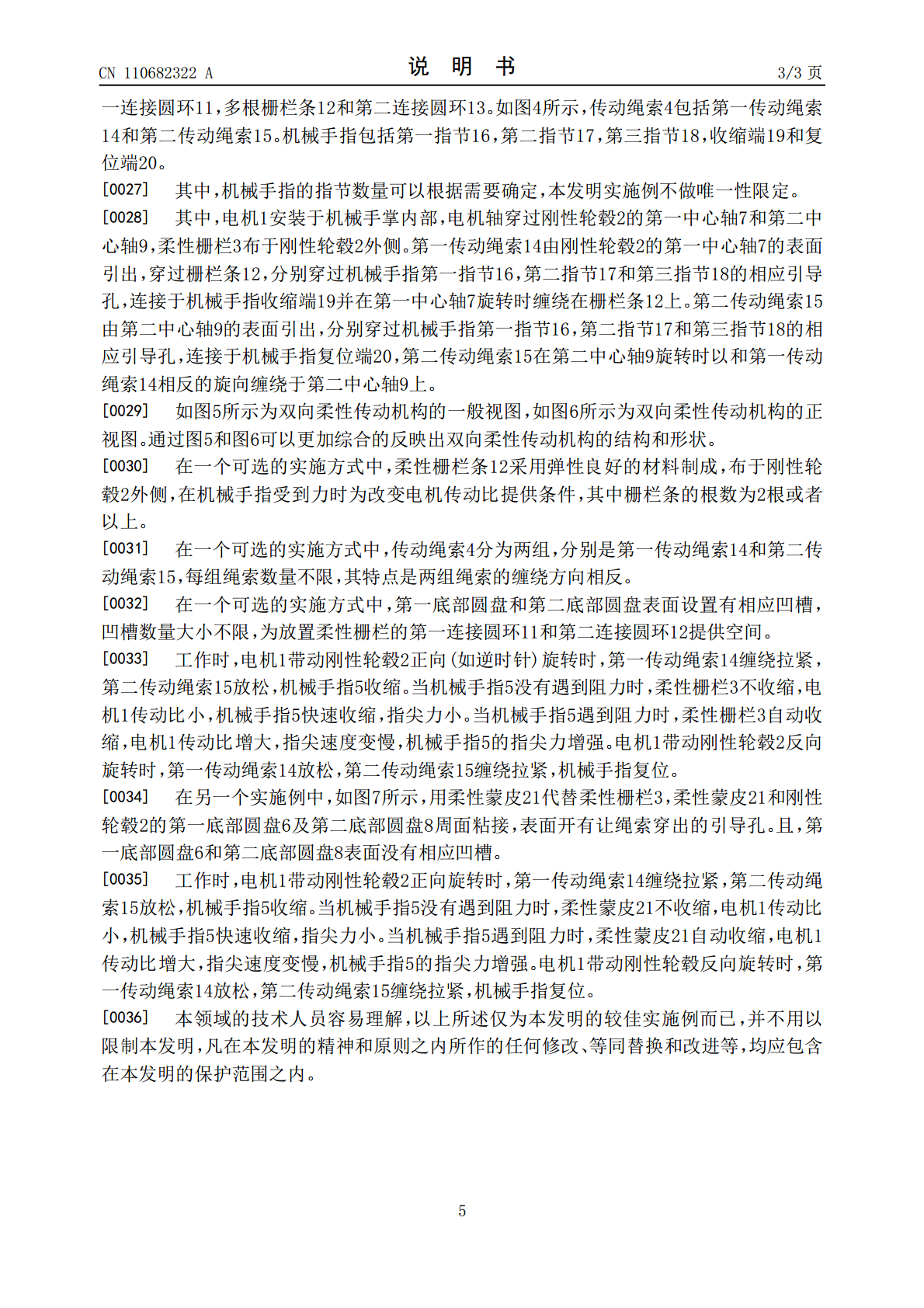
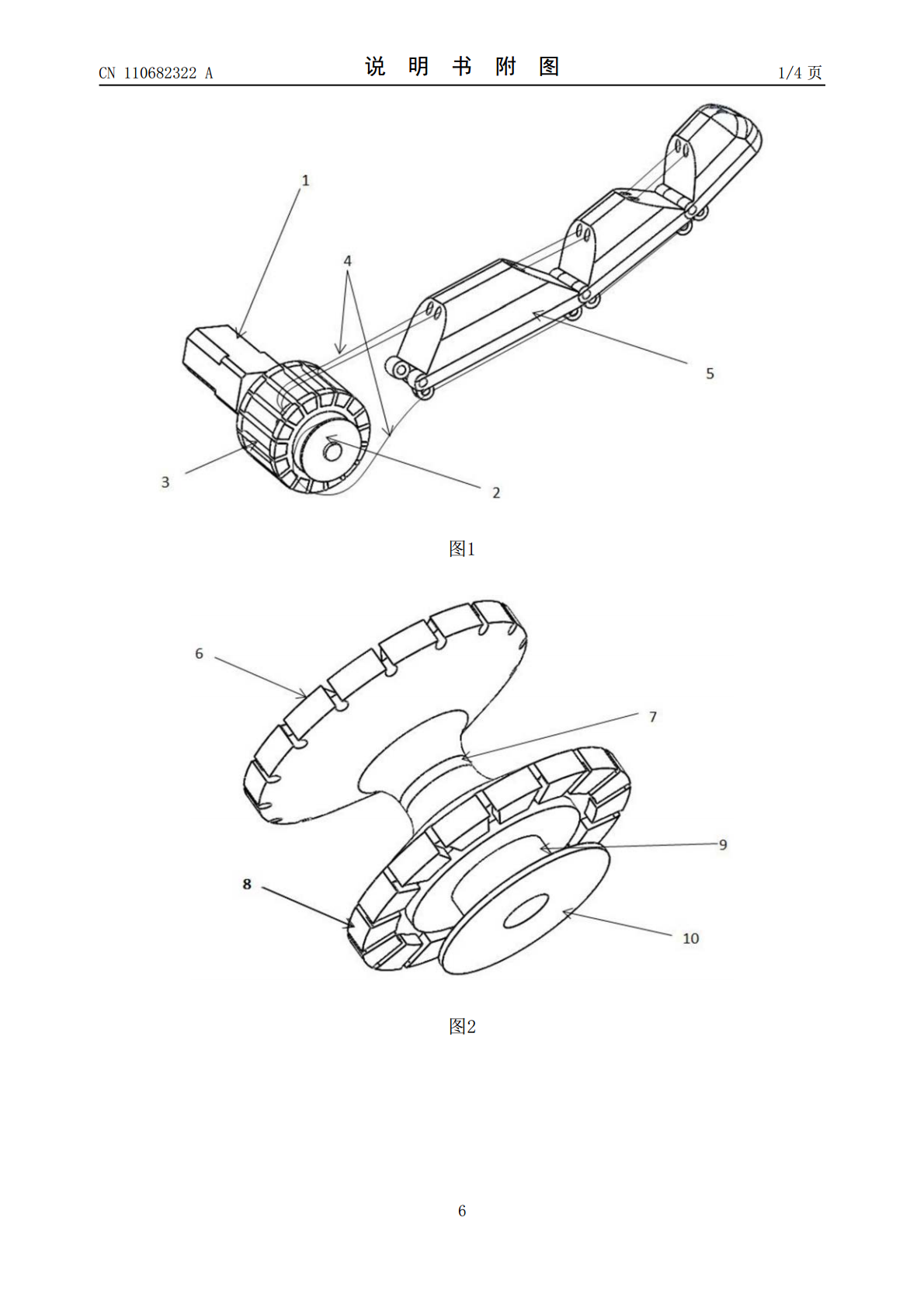
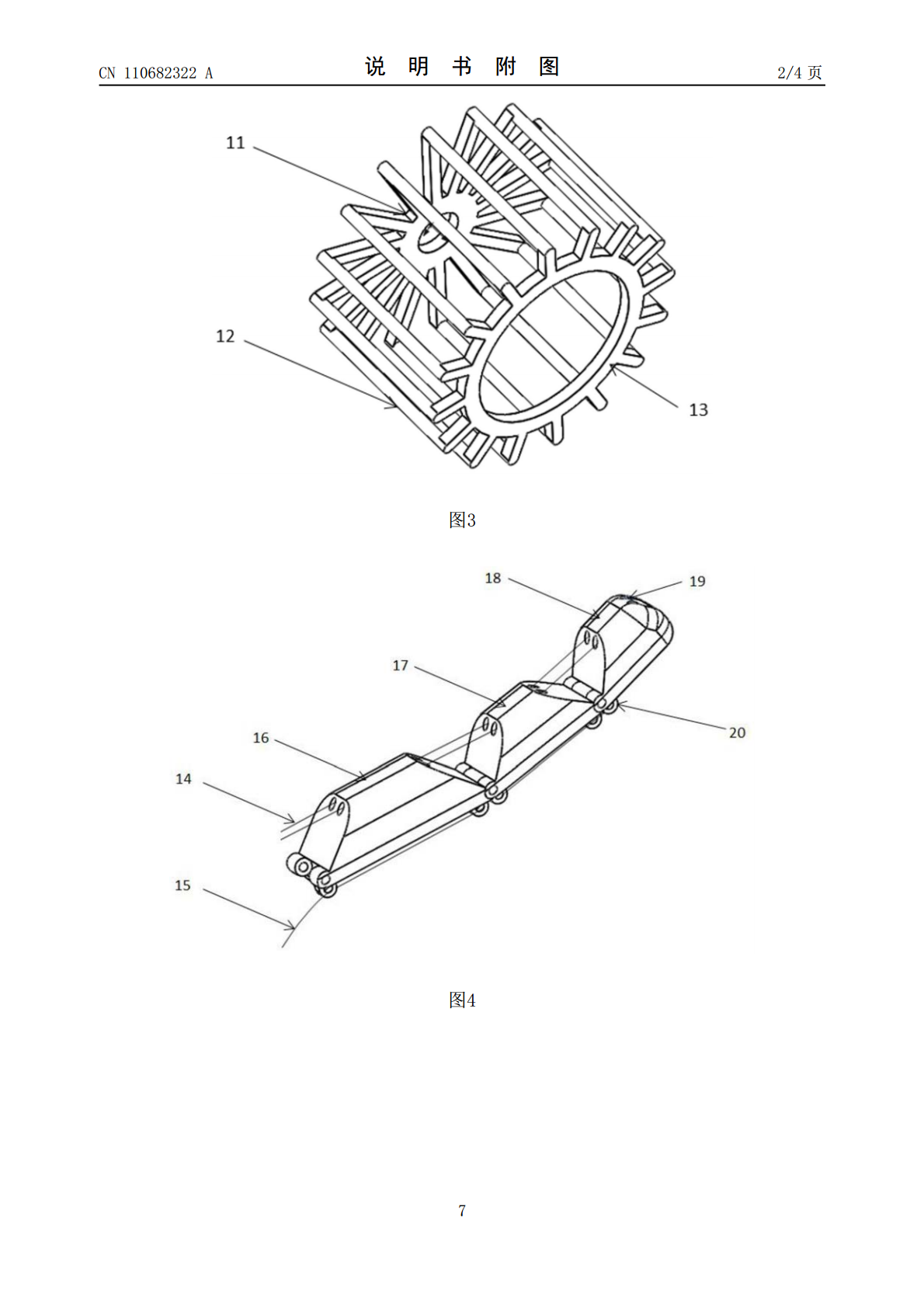
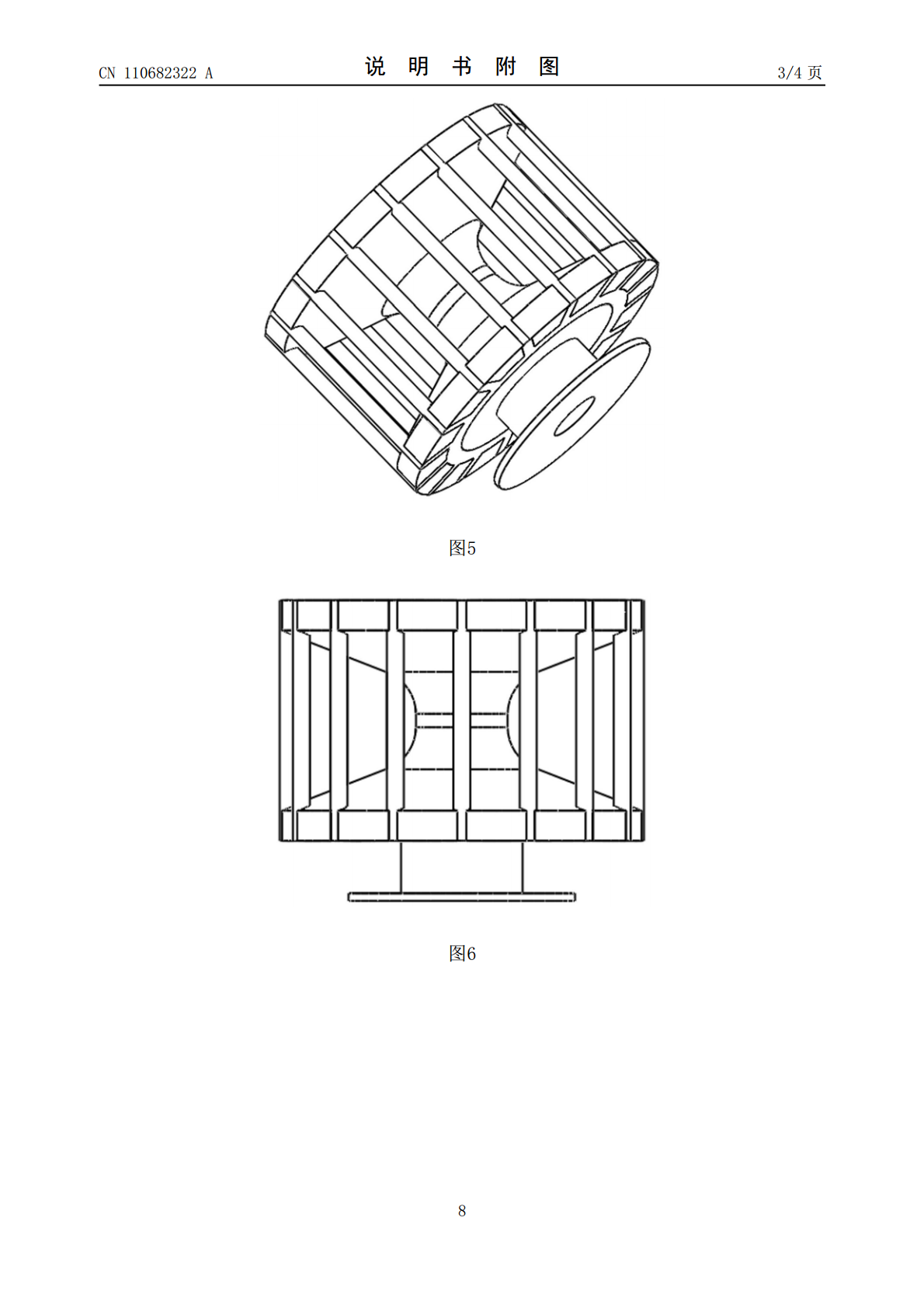
本发明公开了一种面向机械手的双向柔性传动机构,属于机械技术领域,其包括:电机、刚性轮毂、柔性栅栏、第一传动绳索、第二传动绳索及机械手指;电机安装于机械手掌内部,且电机的轴穿过刚性轮毂的中心轴;柔性栅栏布置于刚性轮毂的外侧;第一传动绳索由刚性轮毂引出,穿过柔性栅栏后,分别穿过机械手指的各指节,并连接于机械手指的收缩端,并在刚性轮毂旋转时缠绕在柔性栅栏上;第二传动绳索由刚性轮毂引出后,分别穿过机械手指的各指节,连接于机械手指的复位端,且第二传动绳索在刚性轮毂旋转时以和第一传动绳索相反的旋向缠绕于刚性轮毂上。本
一种柔性传动调节机构.pdf
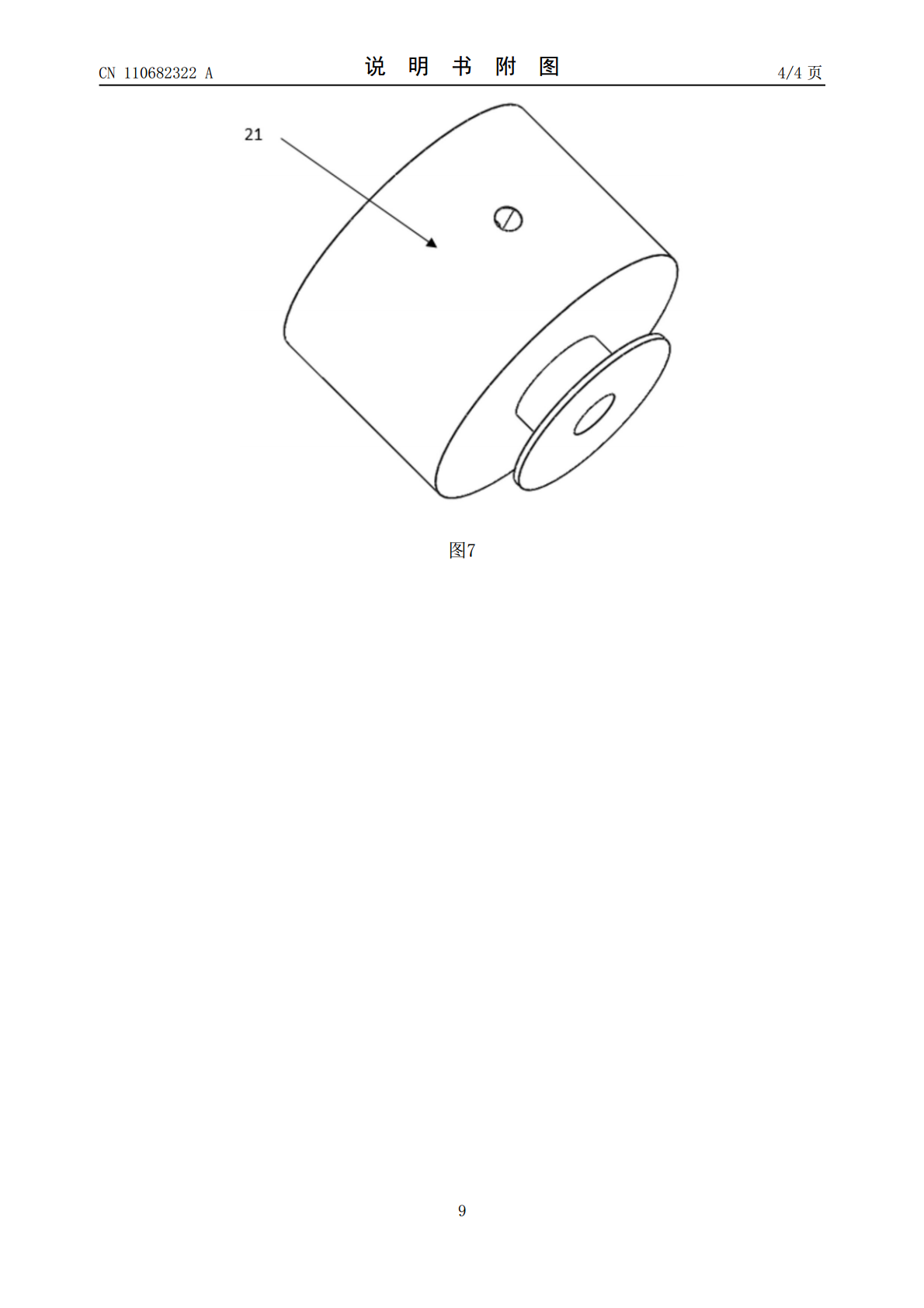
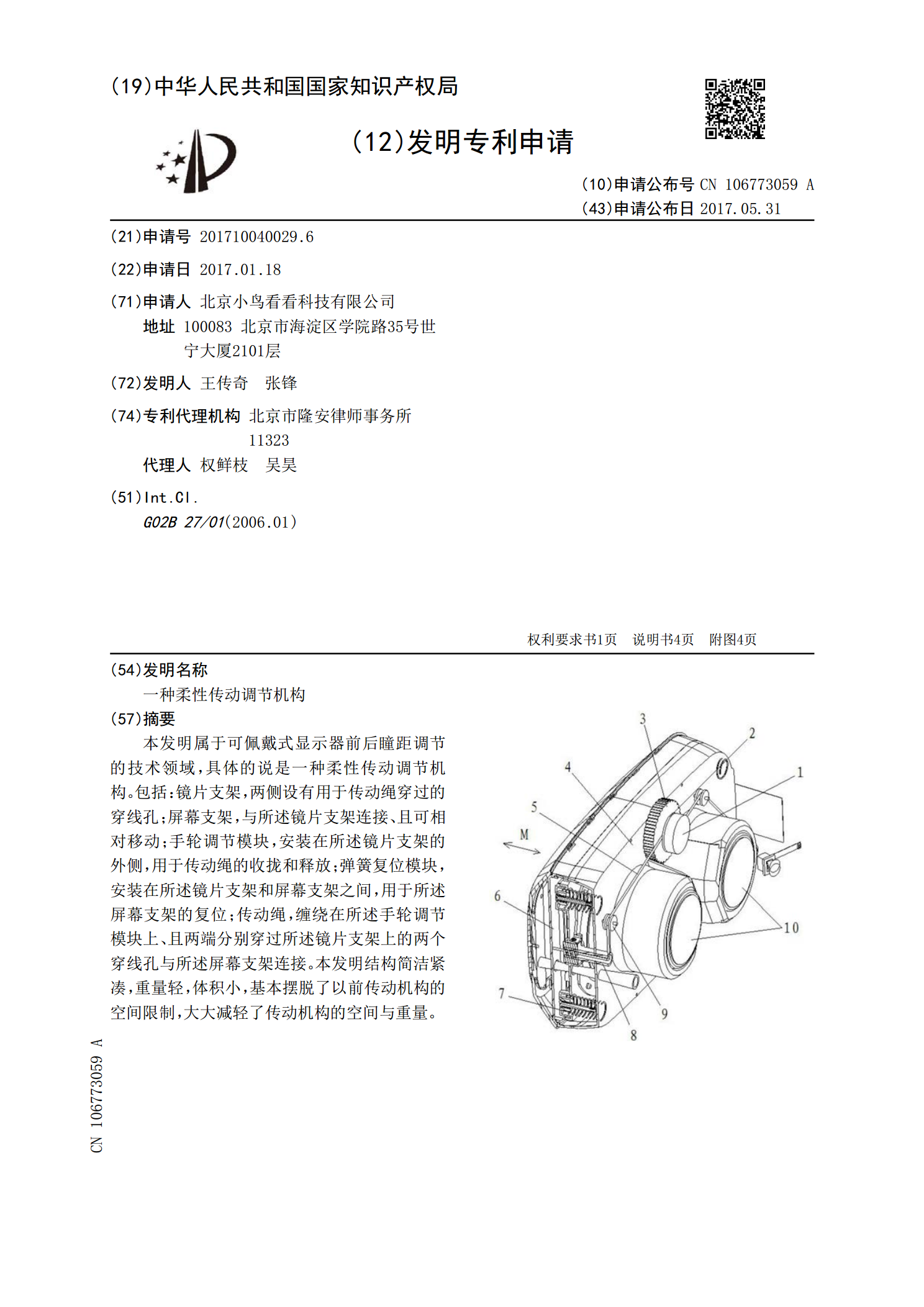
本发明属于可佩戴式显示器前后瞳距调节的技术领域,具体的说是一种柔性传动调节机构。包括:镜片支架,两侧设有用于传动绳穿过的穿线孔;屏幕支架,与所述镜片支架连接、且可相对移动;手轮调节模块,安装在所述镜片支架的外侧,用于传动绳的收拢和释放;弹簧复位模块,安装在所述镜片支架和屏幕支架之间,用于所述屏幕支架的复位;传动绳,缠绕在所述手轮调节模块上、且两端分别穿过所述镜片支架上的两个穿线孔与所述屏幕支架连接。本发明结构简洁紧凑,重量轻,体积小,基本摆脱了以前传动机构的空间限制,大大减轻了传动机构的空间与重量。

双向传动机构.pdf
本发明提供一种双向传动机构,其包括主轴,保持架,隔离环,多个换向离合块,两个传动齿轮,以及两个轴端盖。所述保持架套设在所述主轴上,且在所述保持架上开设有多个一端封闭一端开口滑槽。所述隔离环固设在所述保持架的中部。所述换向离合块分别可滑动的卡置在所述滑槽内。所述每一换向离合块包括两个相互间格的驱动部。所述两个驱动部分别设置有朝向相同的外斜齿纹。所述两个传动齿轮分别套设在所述隔离环连两侧的保持架上,且在所述两个传动齿轮的内侧分别设置有与外斜齿纹相对应的内斜齿纹。在所述两个传动齿轮的外侧设置有外齿纹。所述轴端盖
一种柔性传动机械手臂及控制系统.pdf
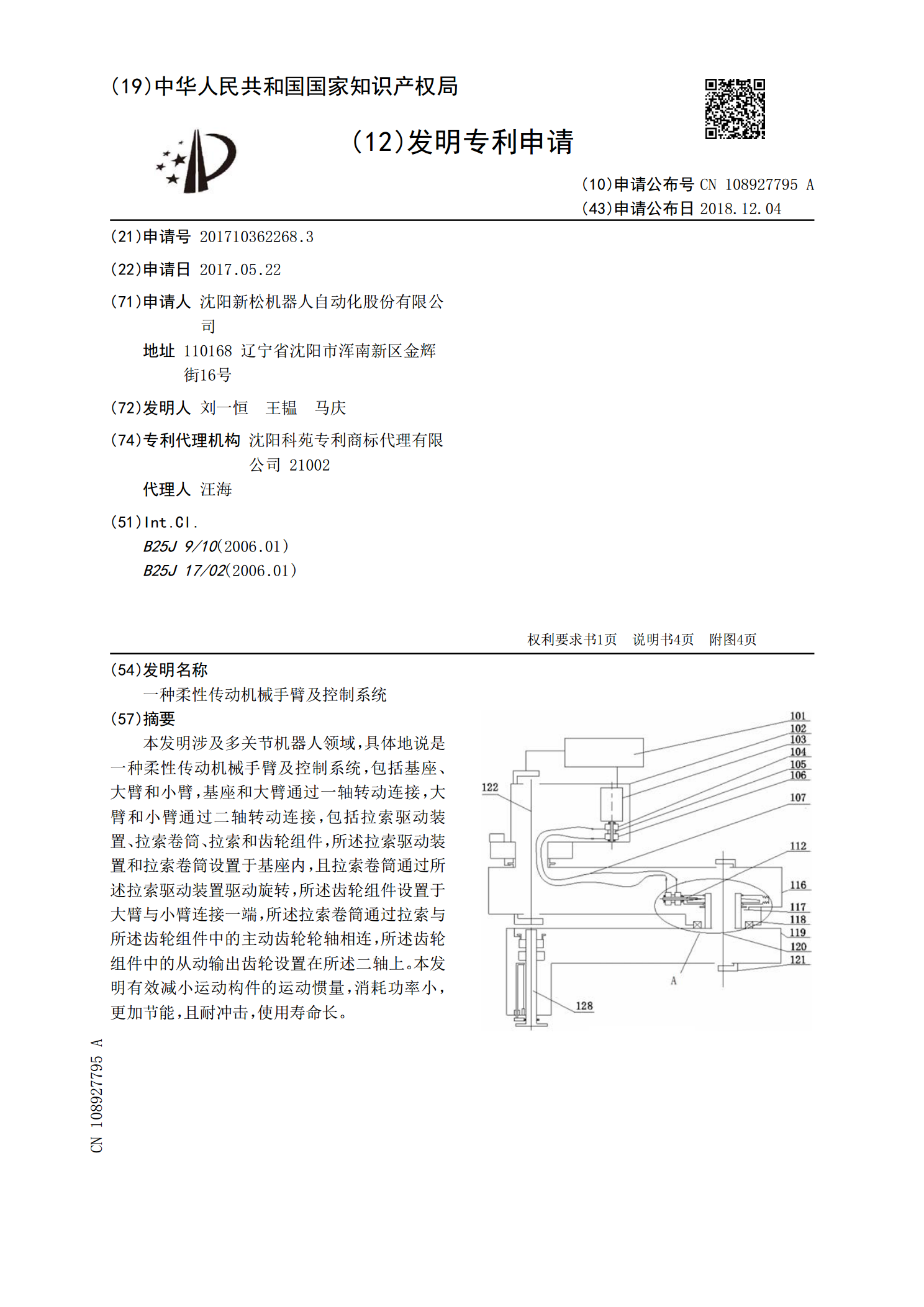
本发明涉及多关节机器人领域,具体地说是一种柔性传动机械手臂及控制系统,包括基座、大臂和小臂,基座和大臂通过一轴转动连接,大臂和小臂通过二轴转动连接,包括拉索驱动装置、拉索卷筒、拉索和齿轮组件,所述拉索驱动装置和拉索卷筒设置于基座内,且拉索卷筒通过所述拉索驱动装置驱动旋转,所述齿轮组件设置于大臂与小臂连接一端,所述拉索卷筒通过拉索与所述齿轮组件中的主动齿轮轮轴相连,所述齿轮组件中的从动输出齿轮设置在所述二轴上。本发明有效减小运动构件的运动惯量,消耗功率小,更加节能,且耐冲击,使用寿命长。

一种双向自动变速电机传动机构.pdf
本发明提供了一种双向自动变速电机传动机构,属于机械技术领域。它解决了现有电机传动机构无法使电动三轮车实现倒车的问题。本双向自动变速电机传动机构的电机位于壳体的一侧,自动变速器和差速器均位于壳体内,电机与自动变速器相连,壳体内固连有后退单向器,其周向外侧壁上具有单向卡槽,变速器轴上套有前进单向器,其具有单向卡头,壳体内固连有安装架,安装架的安装孔内设有销轴和弹簧,销轴在弹簧弹力的作用下始终具有抵靠在后退单向器周向外侧壁上的趋势,当销轴嵌入在单向卡槽内时,前进单向器能正常旋转,当销轴抵靠在后退单向器的周向外侧