
轮‑履复合式移动机器人.pdf

宁馨****找我


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮‑履复合式移动机器人.pdf
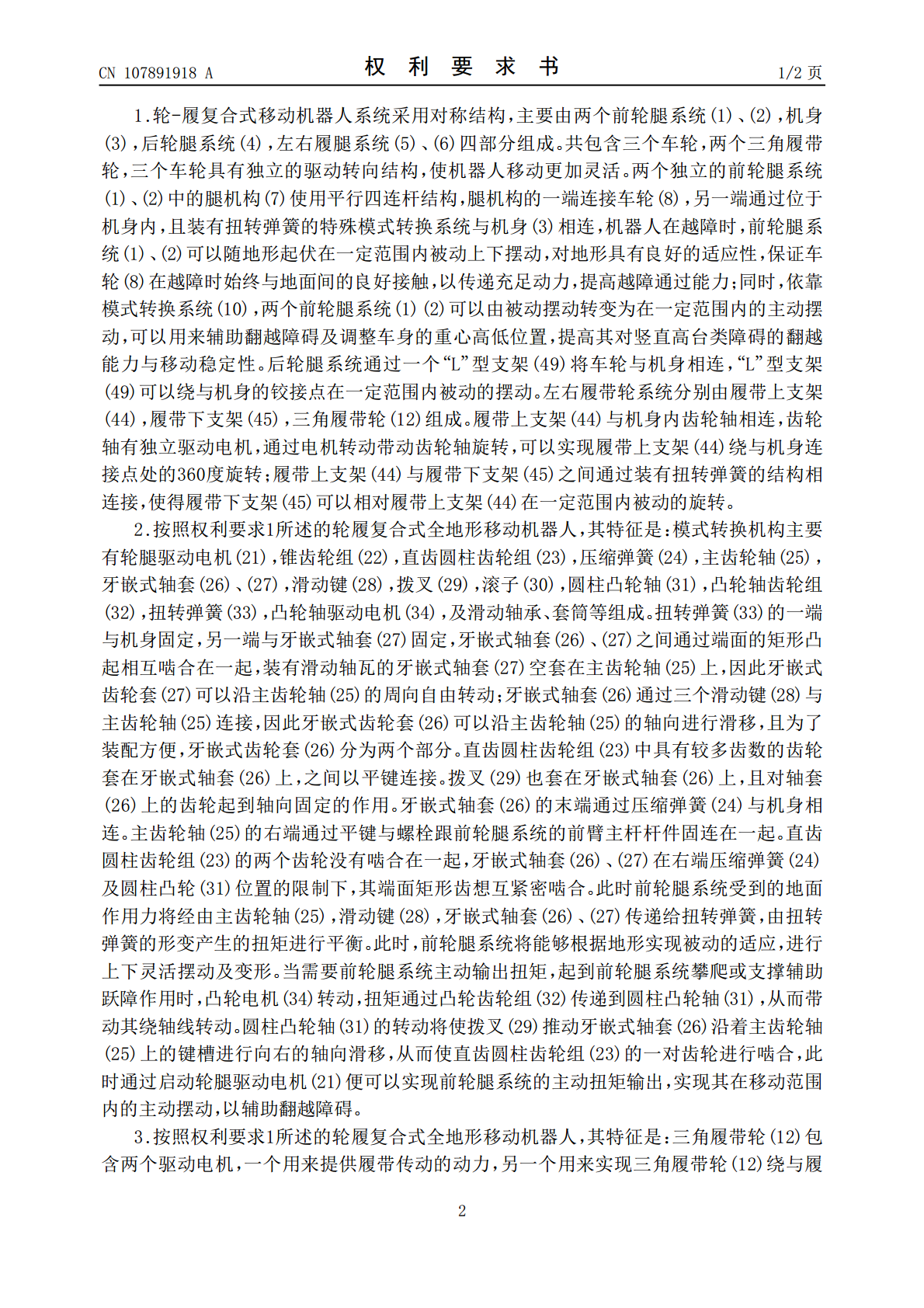
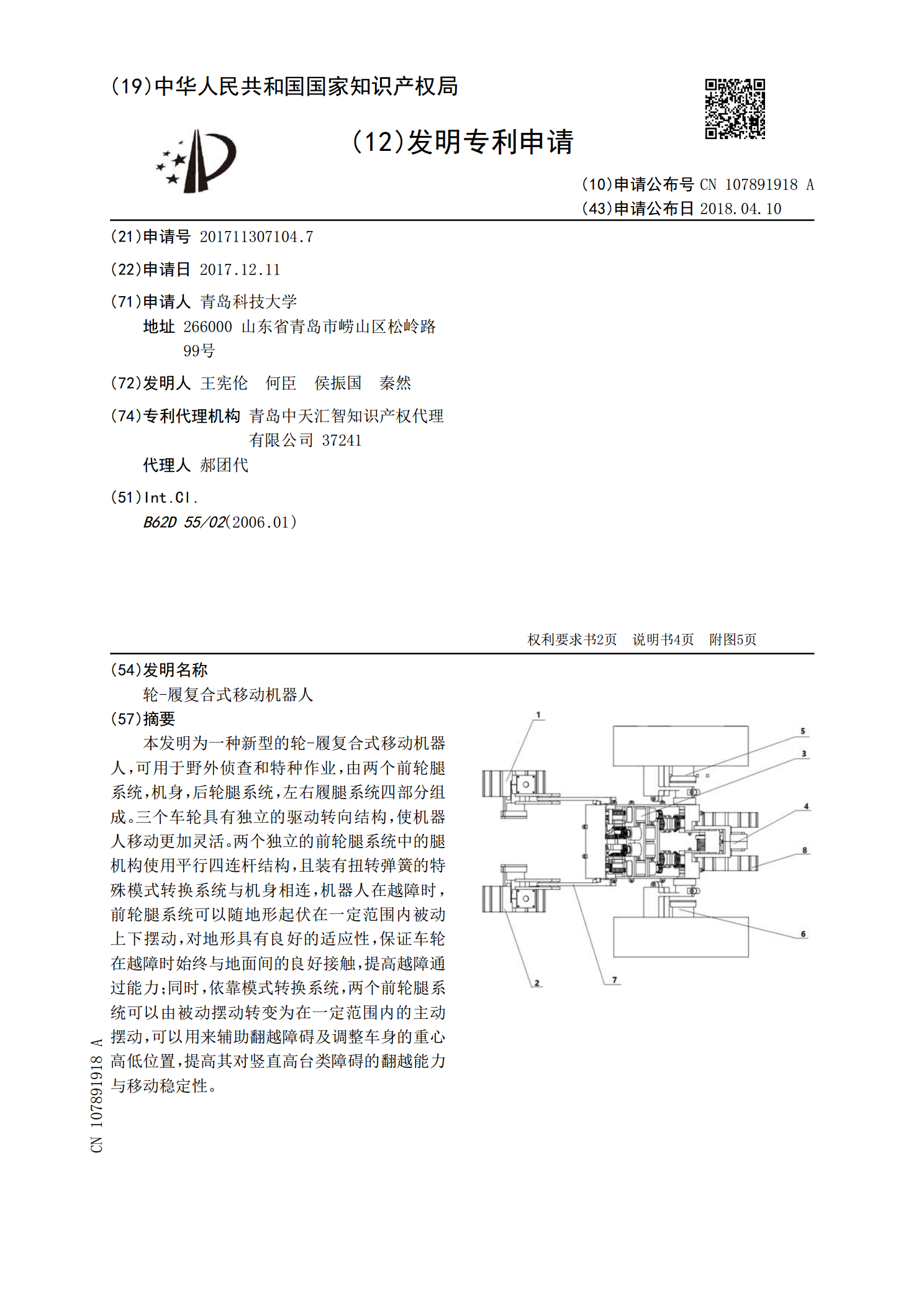
本发明为一种新型的轮‑履复合式移动机器人,可用于野外侦查和特种作业,由两个前轮腿系统,机身,后轮腿系统,左右履腿系统四部分组成。三个车轮具有独立的驱动转向结构,使机器人移动更加灵活。两个独立的前轮腿系统中的腿机构使用平行四连杆结构,且装有扭转弹簧的特殊模式转换系统与机身相连,机器人在越障时,前轮腿系统可以随地形起伏在一定范围内被动上下摆动,对地形具有良好的适应性,保证车轮在越障时始终与地面间的良好接触,提高越障通过能力;同时,依靠模式转换系统,两个前轮腿系统可以由被动摆动转变为在一定范围内的主动摆动,可以
轮履复合式全向移动机器人.pdf
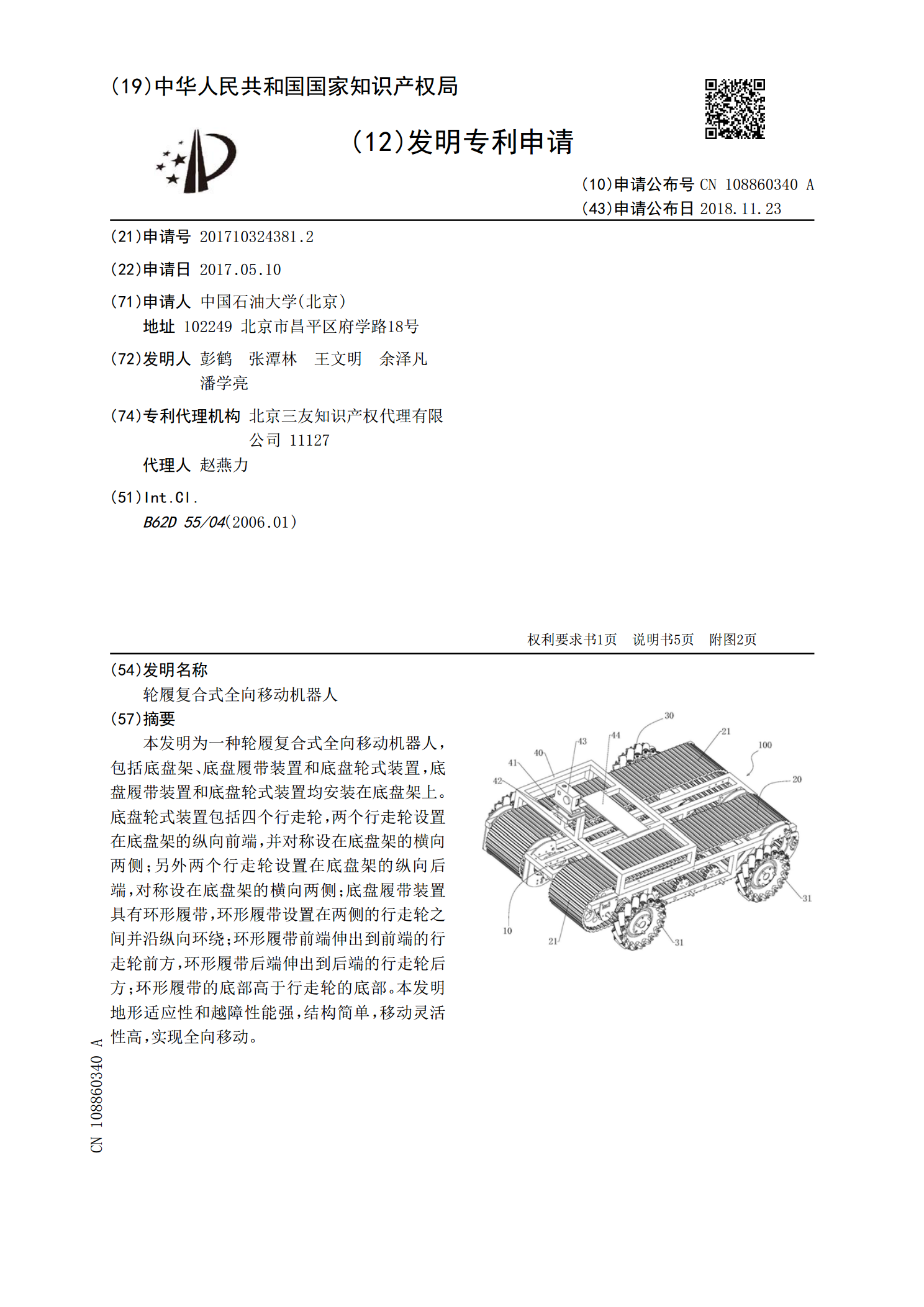
本发明为一种轮履复合式全向移动机器人,包括底盘架、底盘履带装置和底盘轮式装置,底盘履带装置和底盘轮式装置均安装在底盘架上。底盘轮式装置包括四个行走轮,两个行走轮设置在底盘架的纵向前端,并对称设在底盘架的横向两侧;另外两个行走轮设置在底盘架的纵向后端,对称设在底盘架的横向两侧;底盘履带装置具有环形履带,环形履带设置在两侧的行走轮之间并沿纵向环绕;环形履带前端伸出到前端的行走轮前方,环形履带后端伸出到后端的行走轮后方;环形履带的底部高于行走轮的底部。本发明地形适应性和越障性能强,结构简单,移动灵活性高,实现全
轮履腿复合式移动机器人.pdf
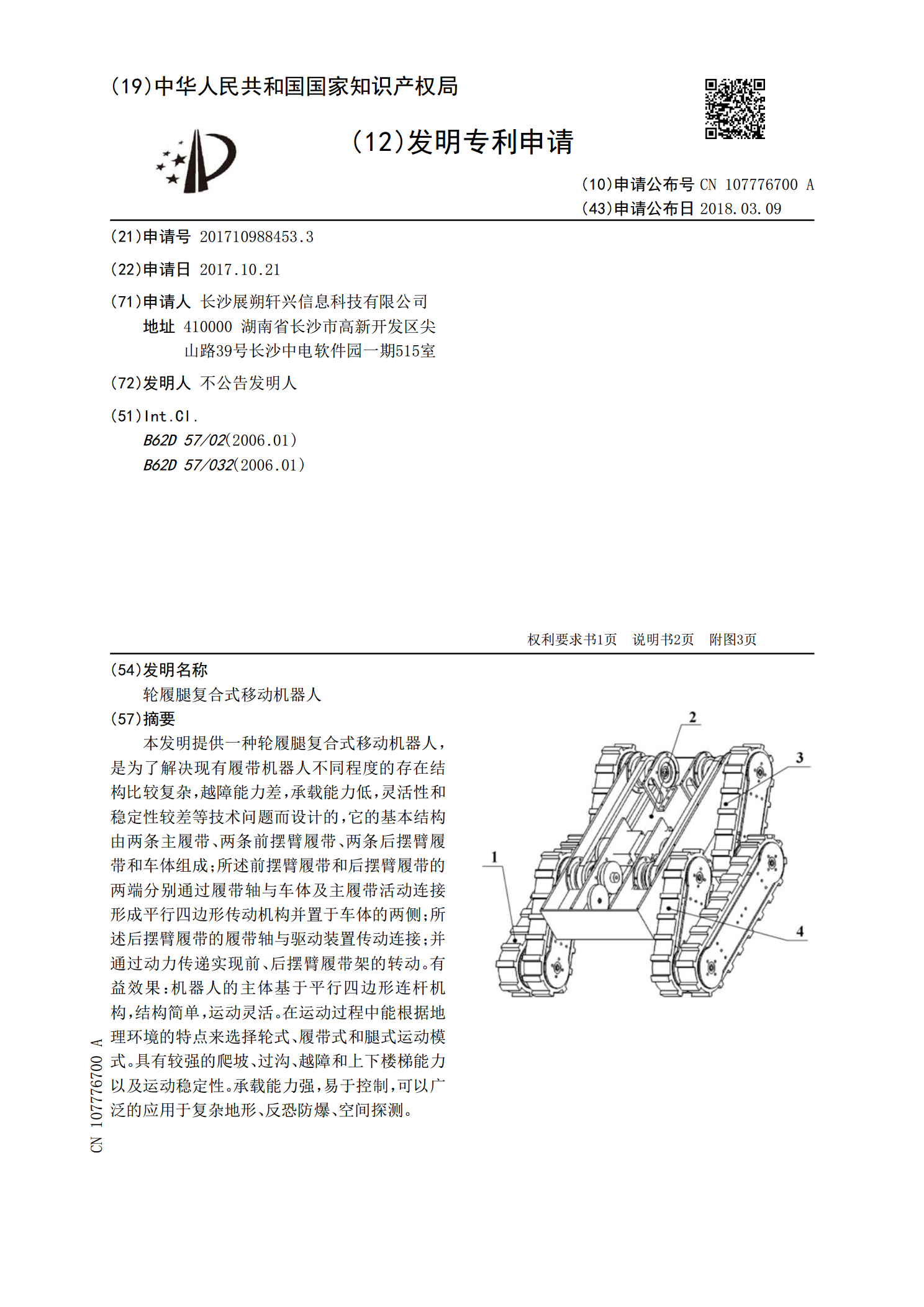
本发明提供一种轮履腿复合式移动机器人,是为了解决现有履带机器人不同程度的存在结构比较复杂,越障能力差,承载能力低,灵活性和稳定性较差等技术问题而设计的,它的基本结构由两条主履带、两条前摆臂履带、两条后摆臂履带和车体组成;所述前摆臂履带和后摆臂履带的两端分别通过履带轴与车体及主履带活动连接形成平行四边形传动机构并置于车体的两侧;所述后摆臂履带的履带轴与驱动装置传动连接;并通过动力传递实现前、后摆臂履带架的转动。有益效果:机器人的主体基于平行四边形连杆机构,结构简单,运动灵活。在运动过程中能根据地理环境的特点

轮履腿复合式移动机器人.pdf
轮履腿复合式移动机器人,是为了解决现有履带机器人不同程度的存在结构比较复杂,越障能力差,承载能力低,灵活性和稳定性较差等技术问题而设计的,它的基本结构由两条主履带、两条前摆臂履带、两条后摆臂履带和车体组成;所述前摆臂履带和后摆臂履带的两端分别通过履带轴与车体及主履带活动连接形成平行四边形传动机构并置于车体的两侧;所述后摆臂履带的履带轴与驱动装置传动连接;并通过动力传递实现前、后摆臂履带架的转动。有益效果:机器人的主体基于平行四边形连杆机构,结构简单,运动灵活。在运动过程中能根据地理环境的特点来选择轮式、履

轮履腿复合式移动机器人.pdf
本发明提供一种轮履腿复合式移动机器人,包括车架、履带臂、支撑腿、轮式升降机构,其中:履带臂通过内轴和外轴与车架相连接,四套履带臂对称分布于车架的四角;支撑腿通过支撑腿传动轴和车架相连接,两条支撑腿对称分布于车架的前后;轮式升降机构通过连接板与车架相连接,轮式升降机构设置在车架中部。本发明通过电机驱动履带臂、支撑腿和轮式升降机构运动,使机器人具有不同姿态,实现轮、履、腿复合运动方式,在越障能力上有很大提升。